标签:bsp 精度 text 注意 测量 运用 实现 images 贝叶斯
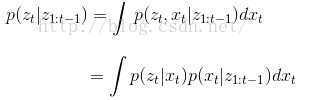
执行测量后的后验概率:

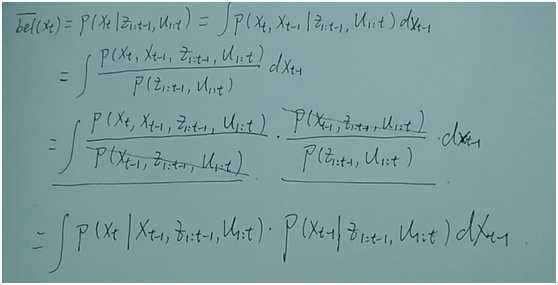
执行测量前的后验概率:

根据式2.23的推导方式

可推出

假定xt是complete,即xt可以完全决定测量结果,那么则有2.56式:

带入2.55可得出2.57与2.58式


1、 注意2.55式的推导,贝叶斯学派,逗号优先级高,逗号连接的同为条件。再运用条件概率公式即可。
2、  的物理含义,因都是测量值,可理解为传感器精度。
的物理含义,因都是测量值,可理解为传感器精度。
在以前测量的基础上现在测量准确的概率。


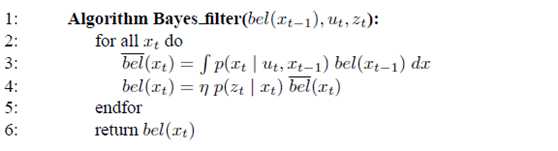
机器人的动态变化与环境特性由两种概率来表示,一种是状态转移概率,描述状态随时间的变化,一种是测量概率,描述传感器对环境的感知。
贝叶斯滤波为后验概率分布,输入量为历史所有的测量值与控制值。通过迭代实现。
probabilistic robotics_bayes filter
标签:bsp 精度 text 注意 测量 运用 实现 images 贝叶斯
原文地址:http://www.cnblogs.com/phldylj/p/7324428.html