标签:终端 hive 测量 tps img archive str 基本使用 执行
说明:
注意:
urg_node包安装
$ sudo apt-get install ros-indigo-urg-node
$ cd catkin_ws/src $ git clone https://github.com/ros-drivers/urg_node // 解决该包依赖库问题 $ cd urg_node $ rosdep install --from-paths ./ --ignore-src --rosdistro jade/kinetic/indigo $ cd .. && cd .. $ catkin_make
测试:
$ roscore
$ rosrun urg_node urg_node _ip_address:=192.168.1.10
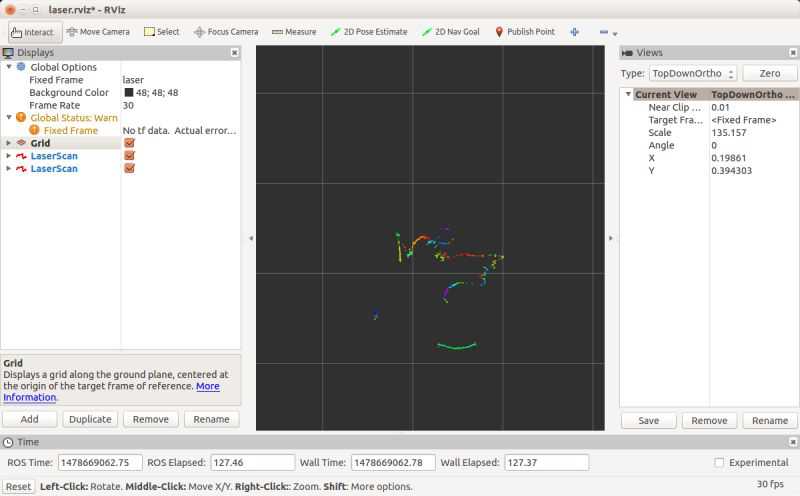
$ rostopic echo /scan
标签:终端 hive 测量 tps img archive str 基本使用 执行
原文地址:http://www.cnblogs.com/lvchaoshun/p/7327161.html