标签:blog 技术分享 logs 返回 star let 操作系统 更改 self
任务优先级设置注意事项
RTX 操作系统任务优先级的设置要注意以下几个问题:
? 设置任务的优先级时,数值越小优先级越低。
? 最低任务优先级是 0,此优先级被空闲任务使用,任何其它任务都不可以使用。
? 用户可以设置的优先级范围是 1-254,由于 RTX 支持时间片调度,所以也是支持用户任务设置为相同的优先级。
? 优先级 255 被保留,用于最重要的任务。
任务优先级设置
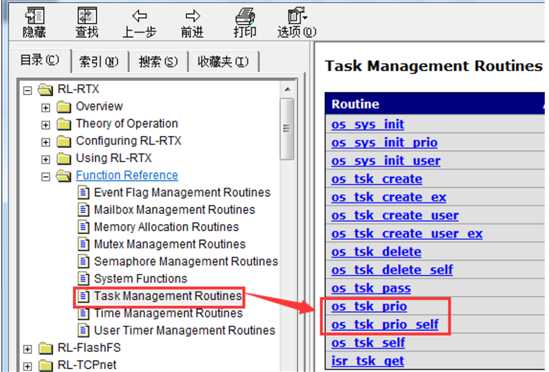
除了创建任务时可以设置任务优先级,也可以通过下面两个函数修改任务优先级:
? os_tsk_prio
? os_tsk_prio_self
函数描述:
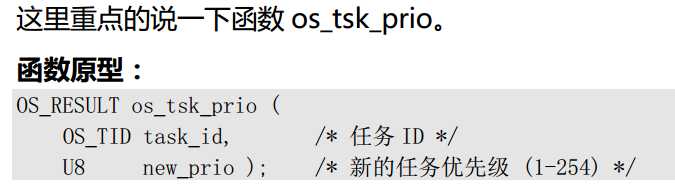
函数 os_tsk_prio 用于修改任务的优先级。
? 第 1 个参数填任务的 ID。如果 ID 参数是 0,那么设置就是当前任务的优先级。
? 第 2 个参数修改任务的优先级,如果 new_prio 的数值比当前执行任务的优先级大,将触发一次任
务切换,切换到任务 ID 为 task_id 的任务中。 如果 new_pro 的数值比当前执行任务的优先级小,
当前任务会继续执行。
? 如果任务优先级修改成功,函数返回 OS_R_OK,其余所有情况返回 OS_R_NOK,比如所写的任务
ID 不存在或者任务还没有启动。
使用这个函数要注意以下几个问题
1. 参数 new_prio 的范围是 1-254。
2. 被修改任务的新优先级会一直保持有效直到用户再次修改。
3. 优先级 0 用于空闲任务,如果用户将这个参数设置为 0 的话,RTX 系统会将其更改为 1。 优先级 255
被保留用于最重要的任务。
4. 对于 RTX 操作系统来说,优先级参数中数值越小优先级越低,也就是说空闲任务的优先级是最低的,
因为它的优先级数值是 0
代码操练场:
实验效果就是,创建任务1,优先级1,任务2,优先级2,并且两个任务都不调用能引起阻塞的函数,这样程序一直卡死在任务2中,此时,我们再行测试,再任务二中增加修改任务1优先级的函数,让任务1优先级高于任务2,这样可以看到任务1运行,任务2被一直“饿死”。
__task void AppTaskStart(void) { AppTaskCreate(); while(1) { os_tsk_prio(HandleTaskLED, 5); // macBeep_TOGGLE(); // os_dly_wait(500); } }
/* 创建启动任务 */ os_sys_init_user (AppTaskStart, /* 任务函数 */ 4, /* 任务优先级 */ &AppTaskStartStk, /* 任务栈 */ sizeof(AppTaskStartStk)); /* 任务栈大小,单位字节数 */ HandleTaskLED = os_tsk_create_user(AppTaskLED, /* 任务函数 */ 2, /* 任务优先级 */ &AppTaskLEDStk, /* 任务栈 */ sizeof(AppTaskLEDStk)); /* 任务栈大小,单位字节数 */
__task void AppTaskLED(void) { while(1) { macLED3_TOGGLE() ; //os_dly_wait(200); } }
标签:blog 技术分享 logs 返回 star let 操作系统 更改 self
原文地址:http://www.cnblogs.com/yangguang-it/p/7327873.html