标签:发布 组件 comm 包括 软件 ima 上层 href 表示
本文主要内容翻译自:https://dev.px4.io/en/concept/architecture.html
PX4代码由两层组成:PX4飞行栈和PX4中间件。其中,前者是一套飞行控制软件,后者是一套通用的机器人中间件,可以支持任意类型的自主机器人。
PX4代码具有很强的通用性,所有类型的机架(实际上包括船和地面车辆等)可以使用同一套代码库,同时其追求模块化,具有以下特点:
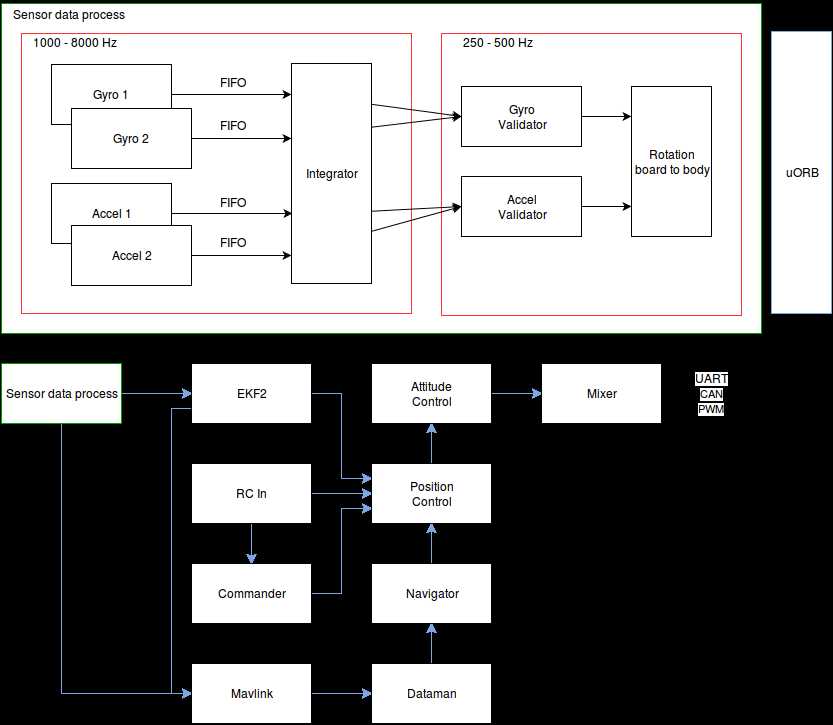
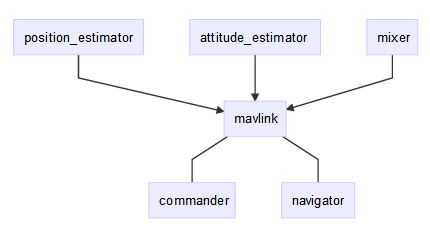
其中每个方框为一个自治的功能模块,箭头表示通过uORB的发布/订阅机制实现的数据连接。
控制器和混控器(Mixer)和具体的飞机有关,而像Commander和Navigator之类的上层任务规划模块则可以在不同平台之间通用。
标签:发布 组件 comm 包括 软件 ima 上层 href 表示
原文地址:http://www.cnblogs.com/spyplus/p/7384431.html