标签:操作 工作站 方法 人工 手动 bsp blog 基本 size
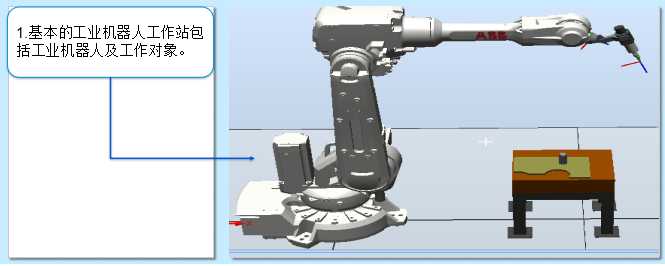
1.学会工业机器人工作站的基本布局方法
一.了解工业机器人工作站
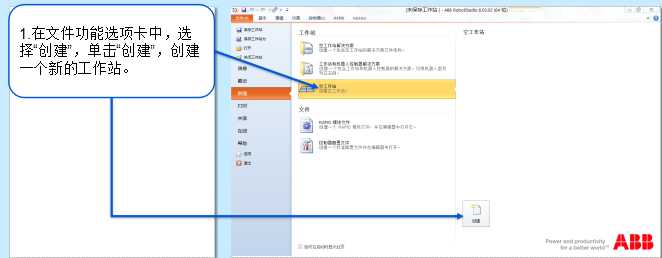
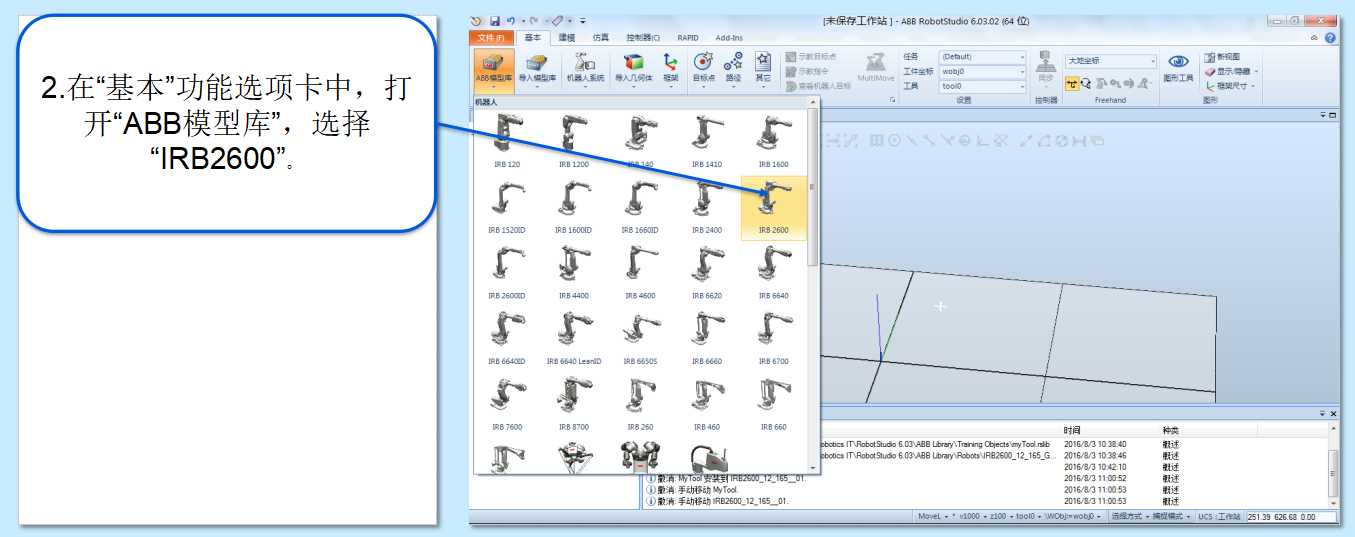
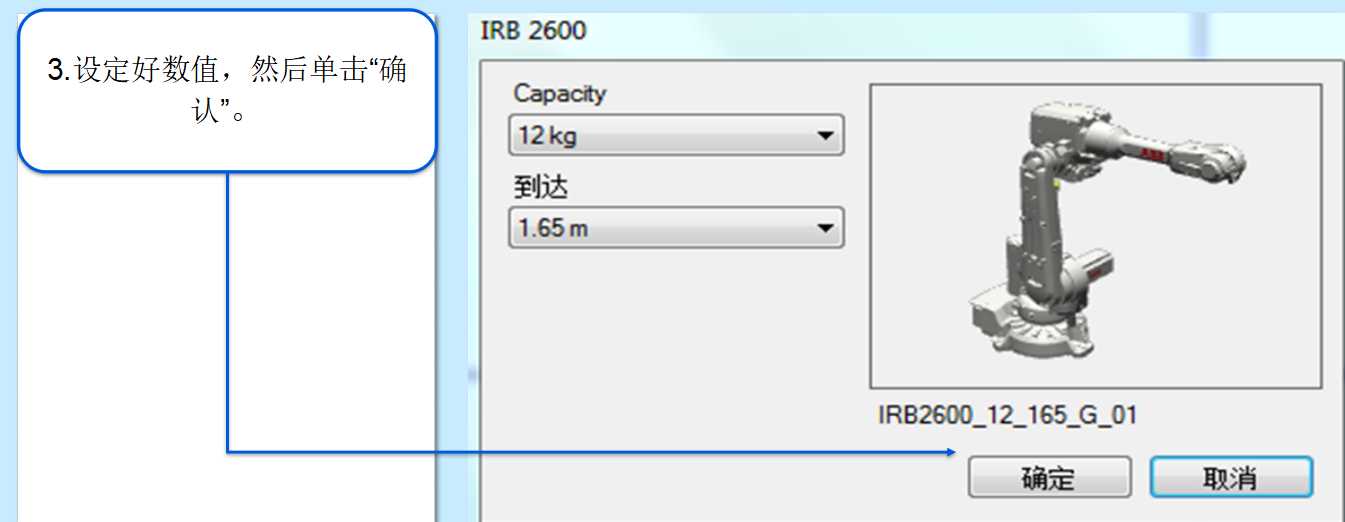
二.导入机器人
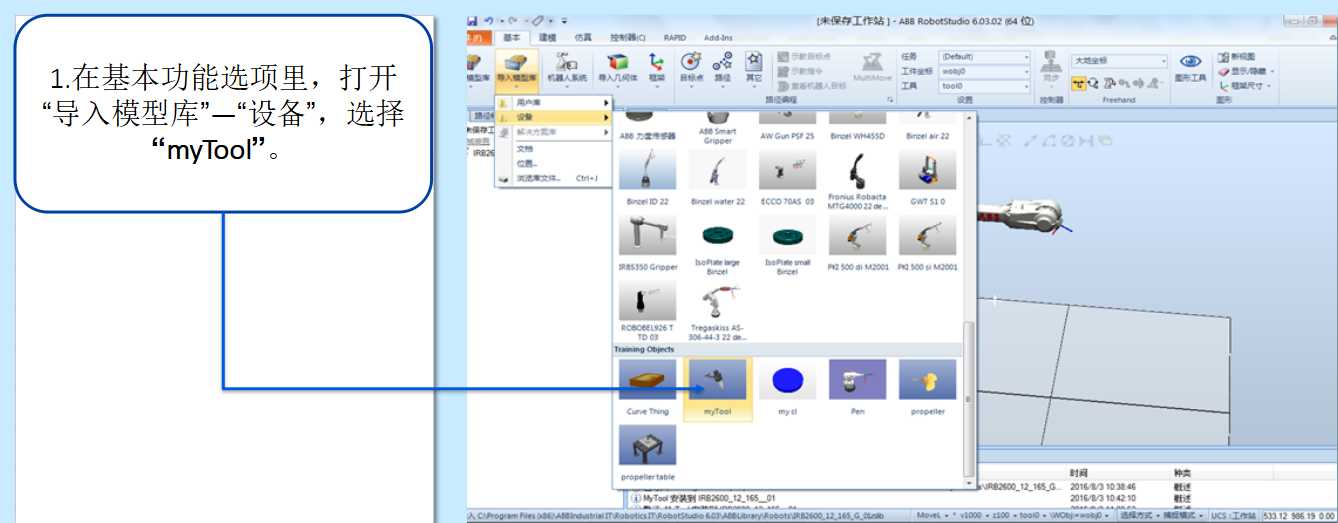
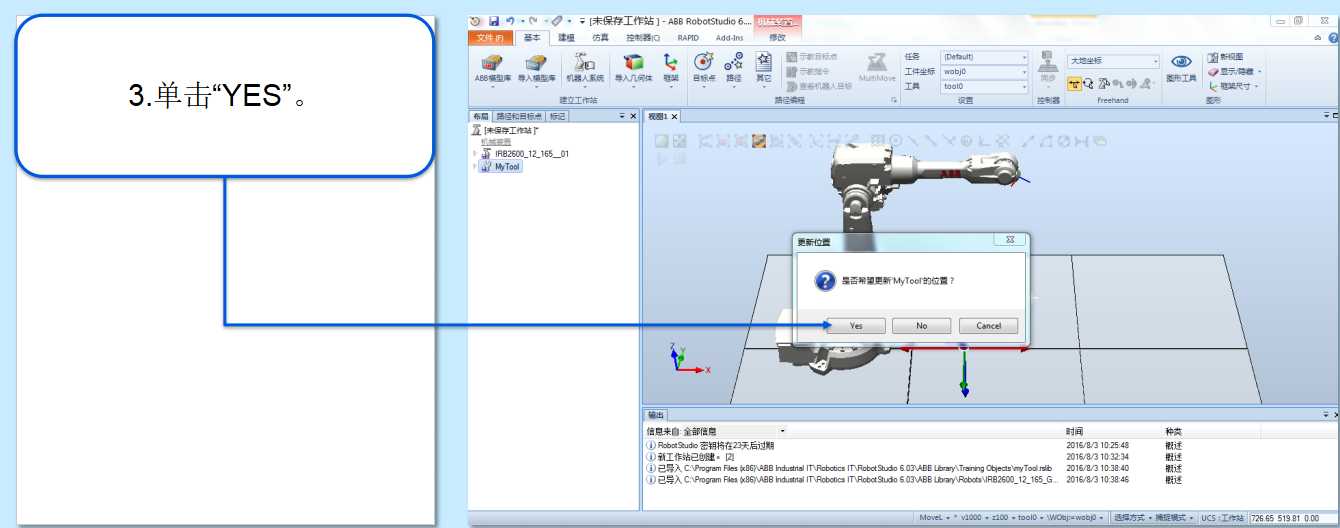
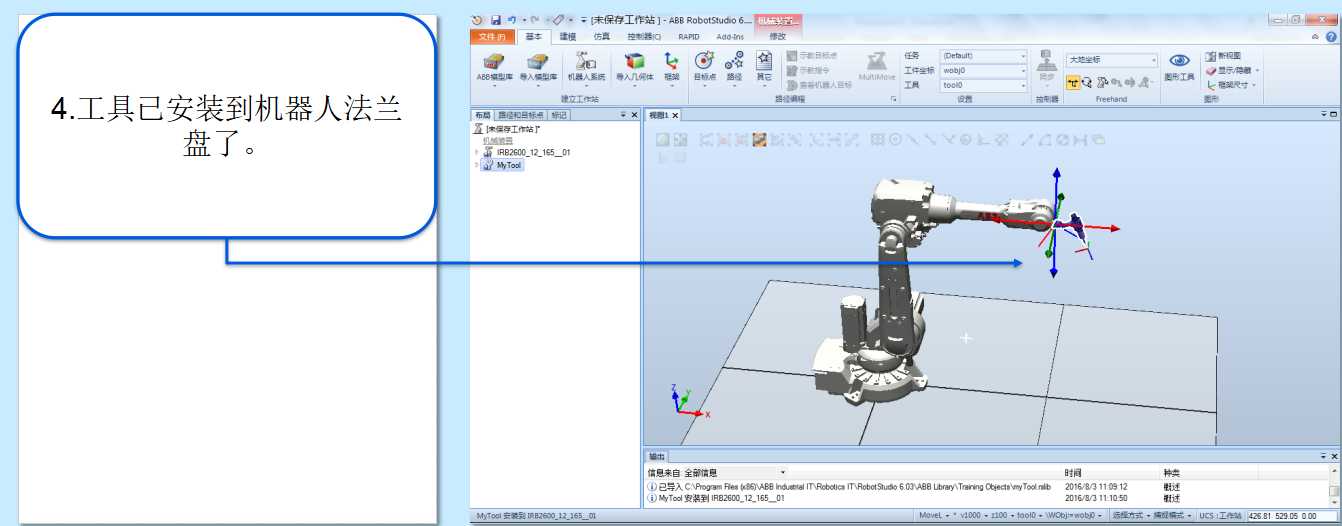
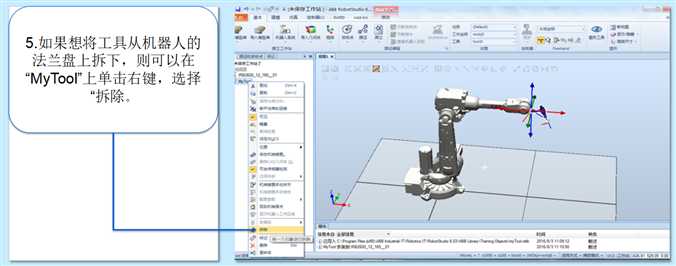
三.加载机器人的工具
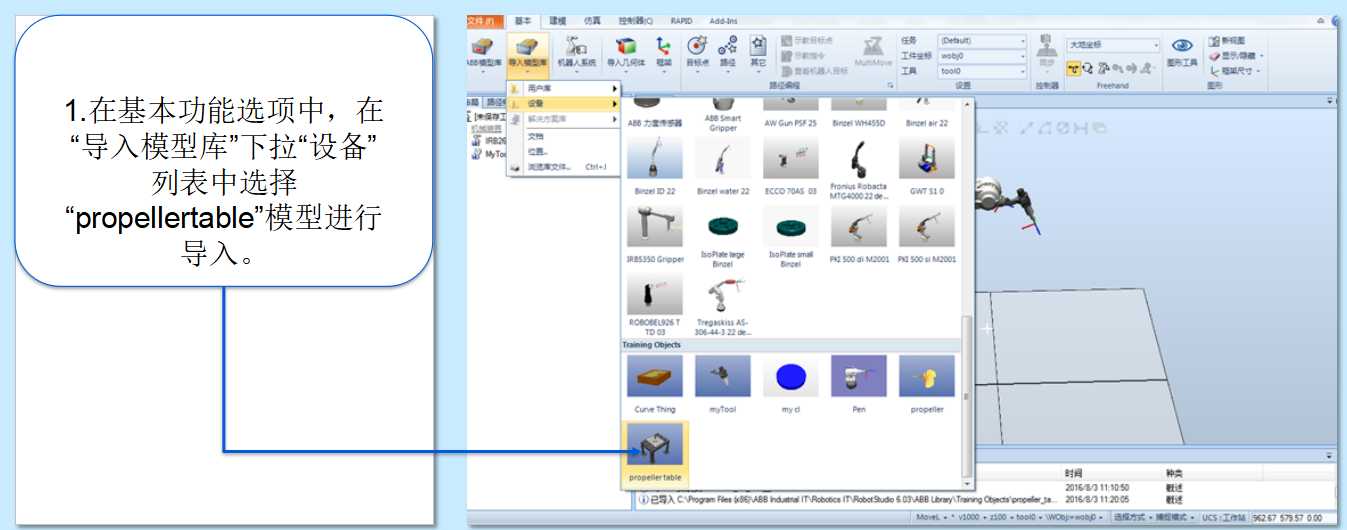
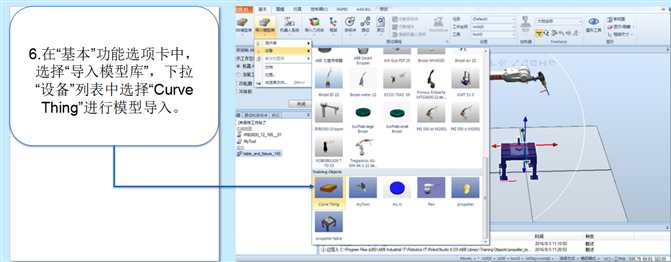
2学会加载工业机器人及周边的模型
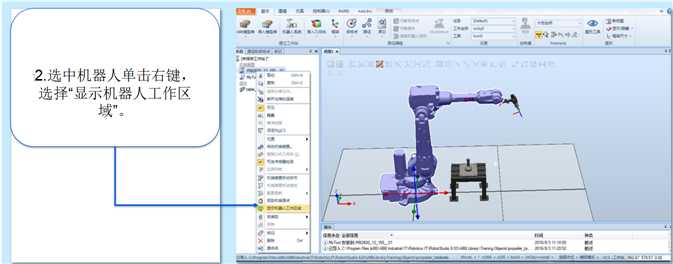
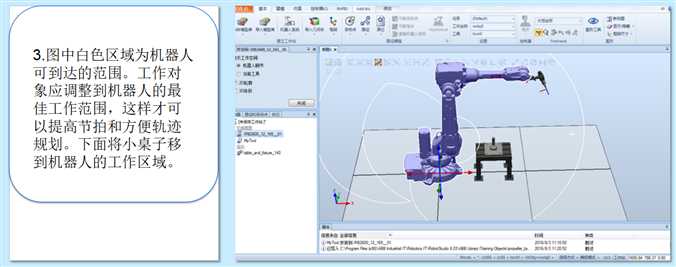
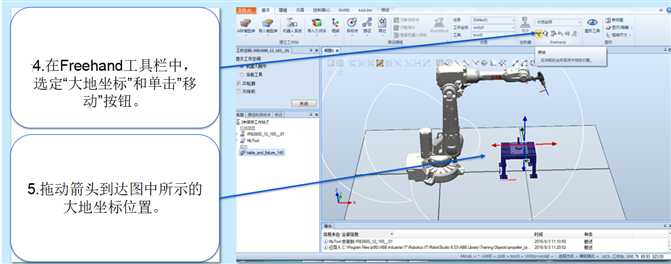
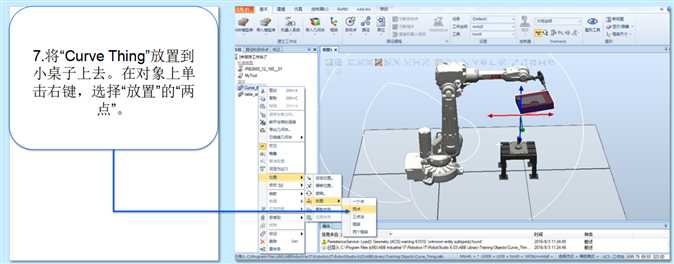
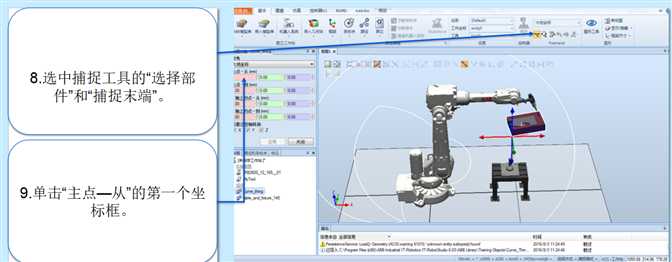
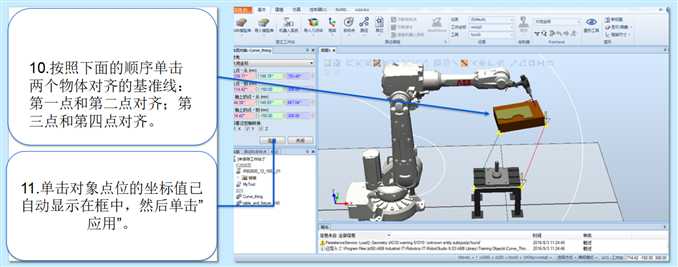
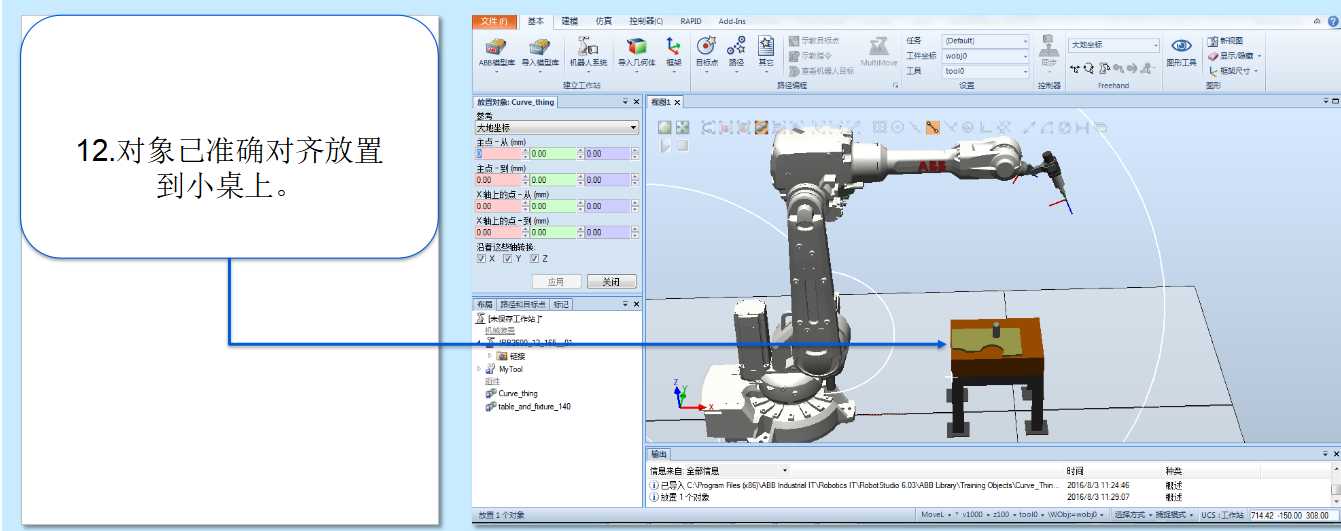
四.摆放周边的模型
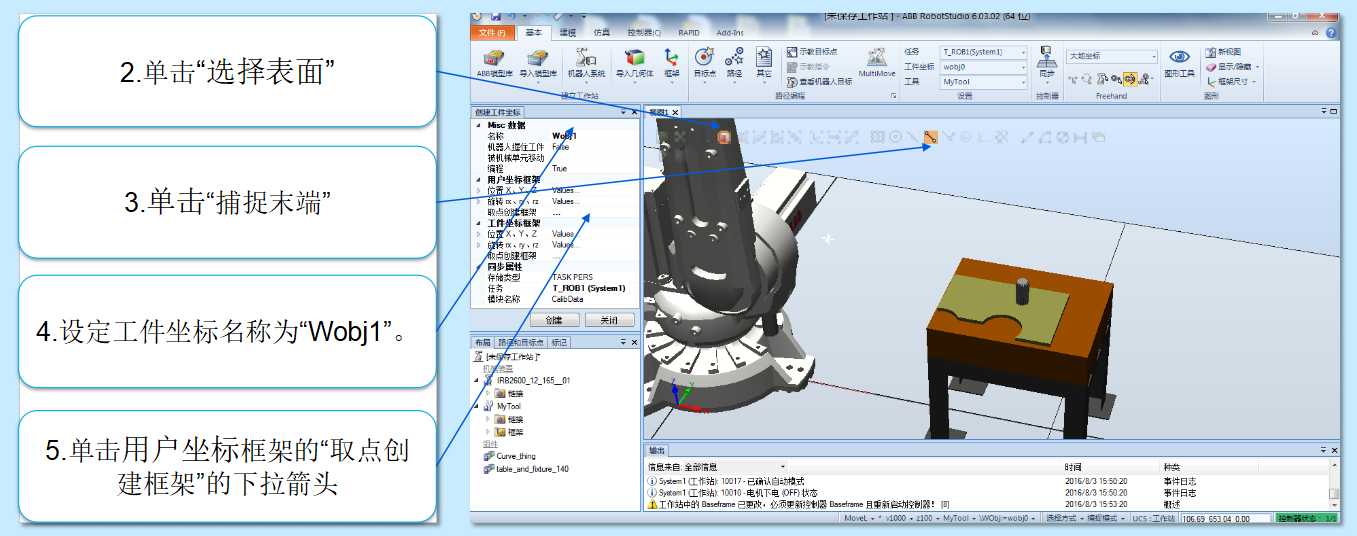
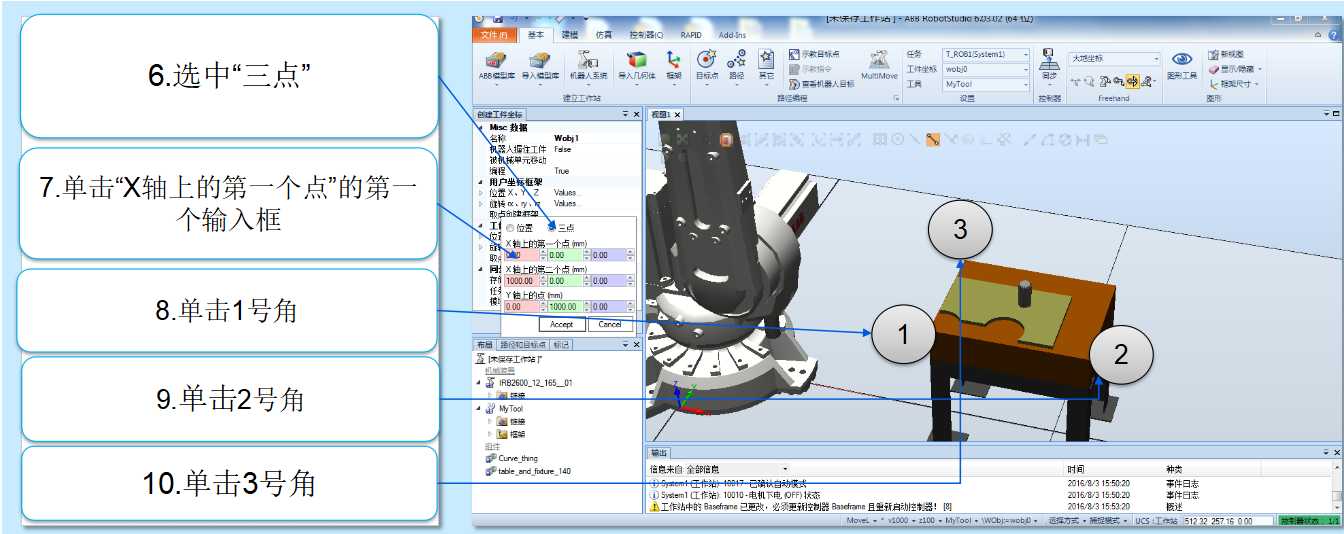
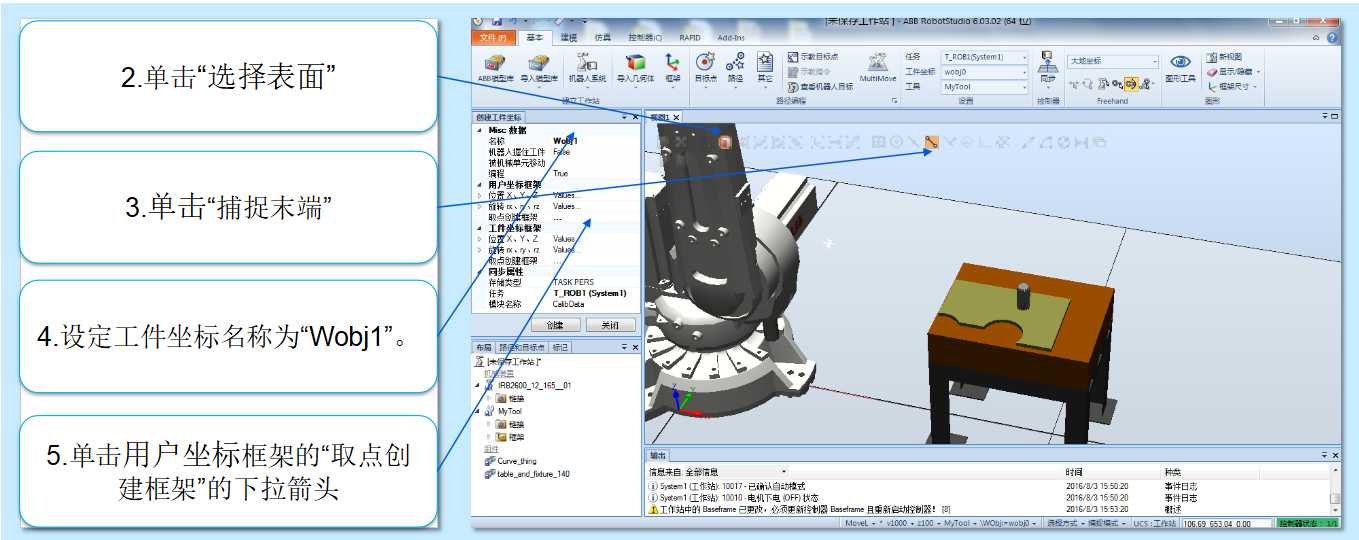
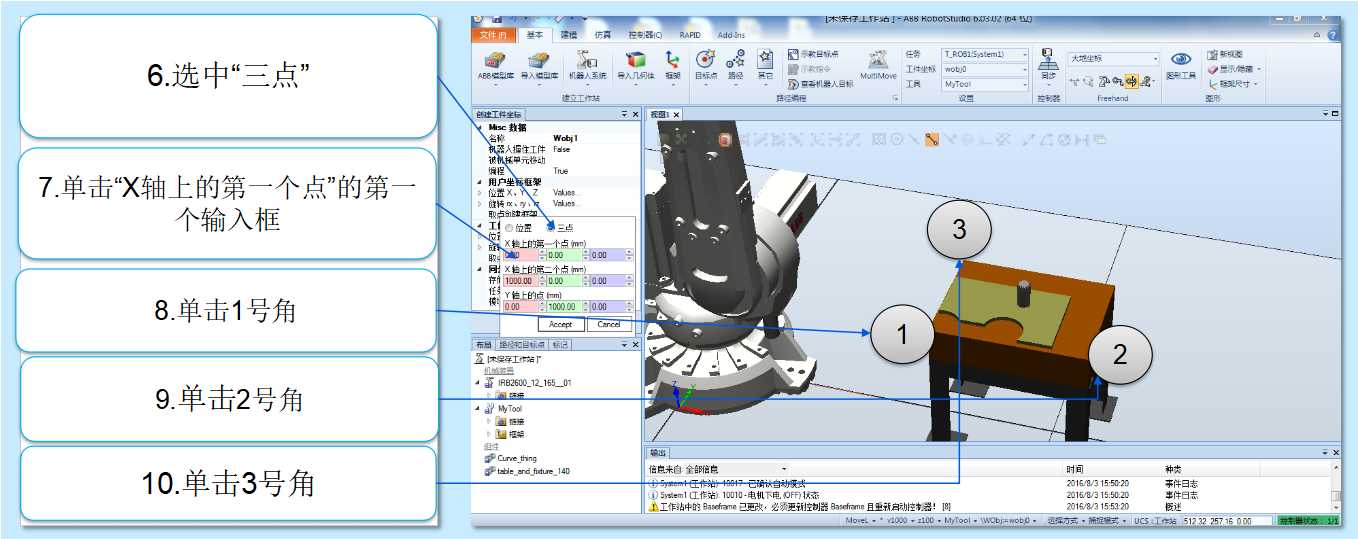
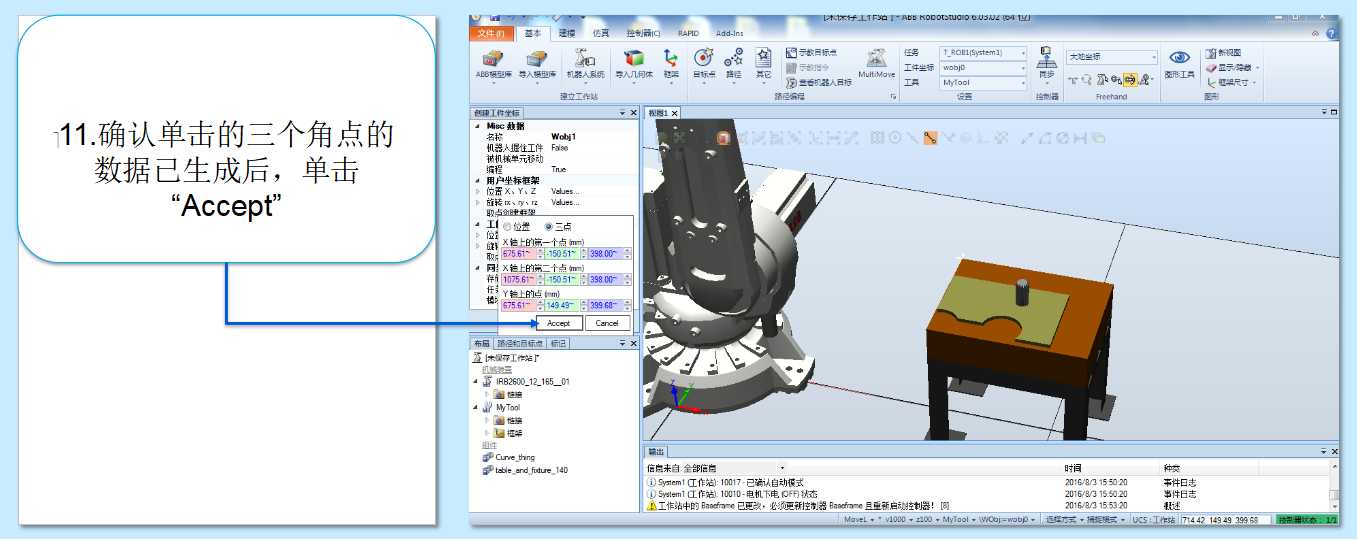
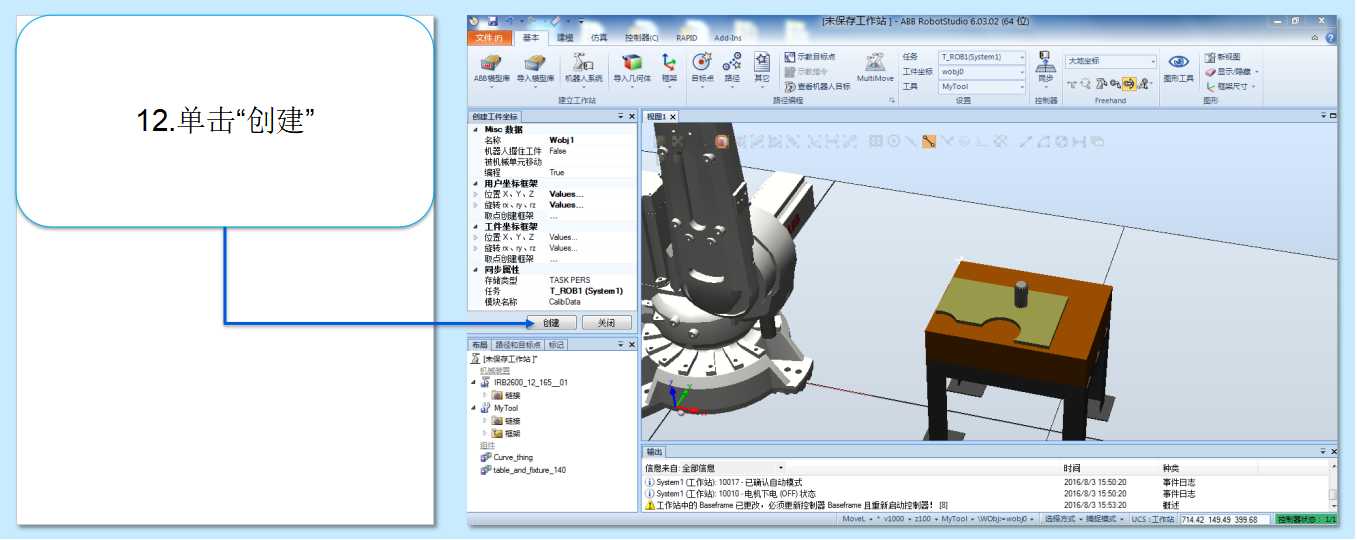
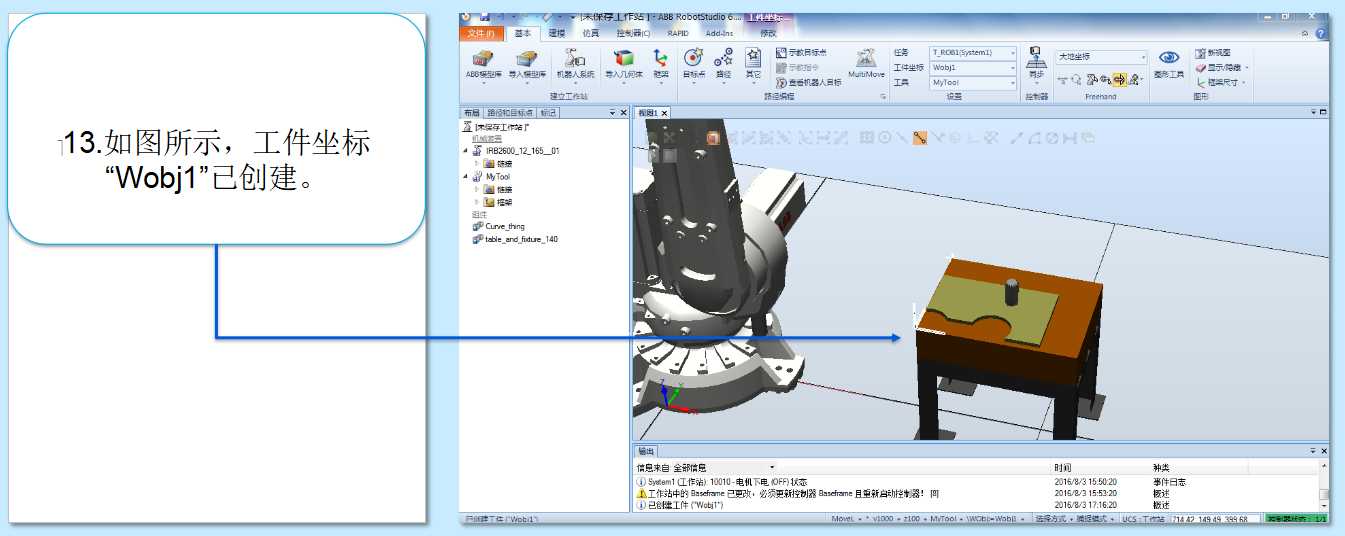
3学会创建工件坐标
一.建立工业机器人工件坐标

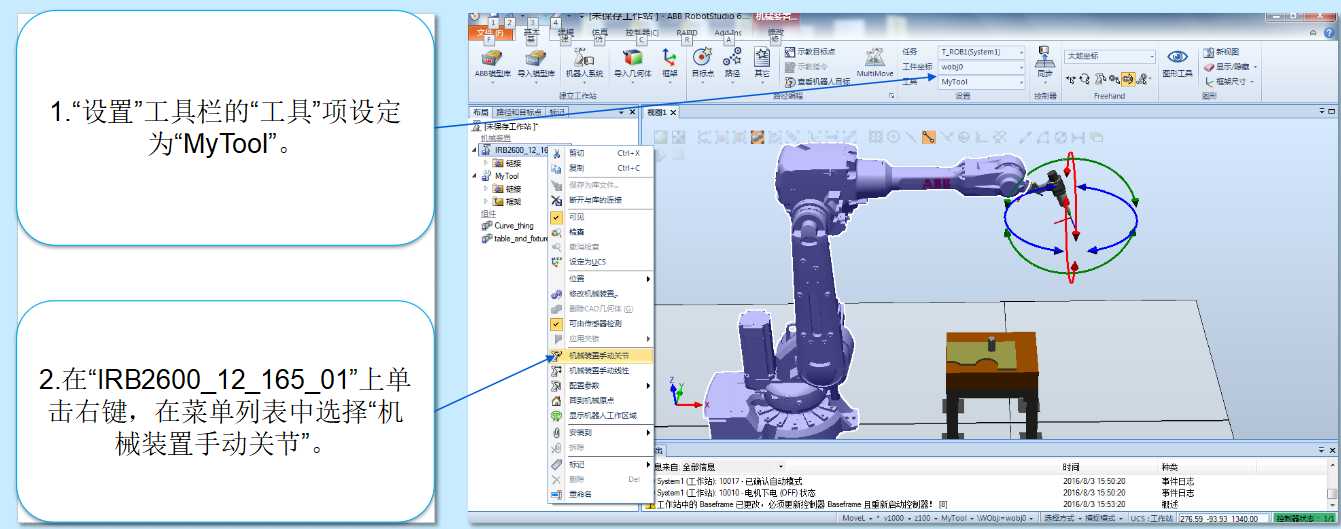
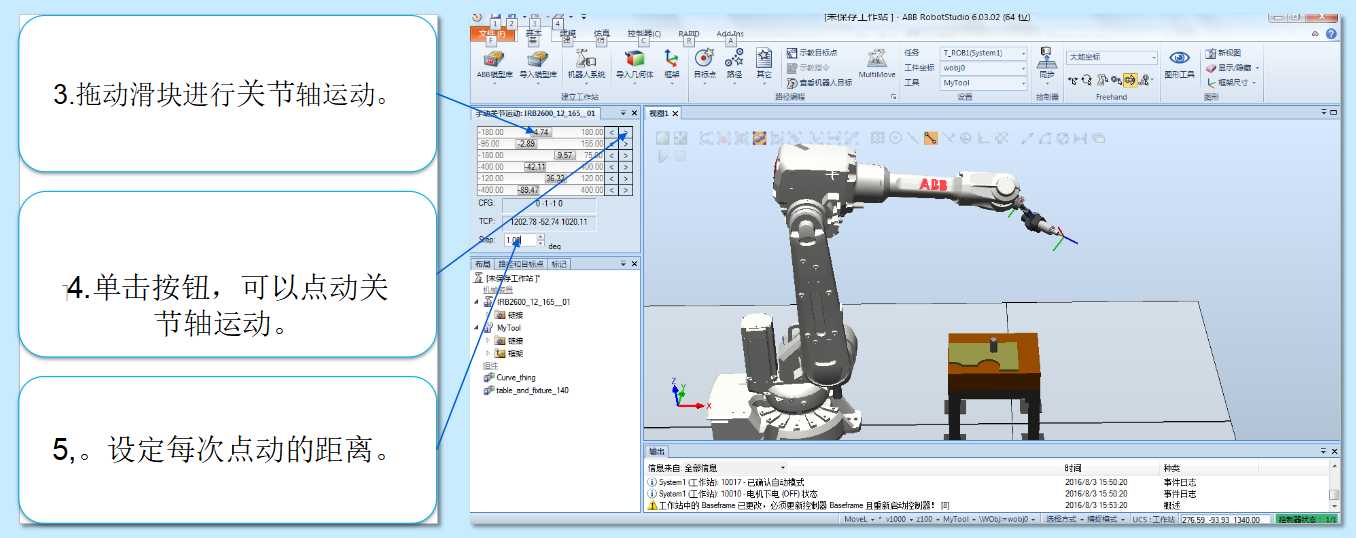
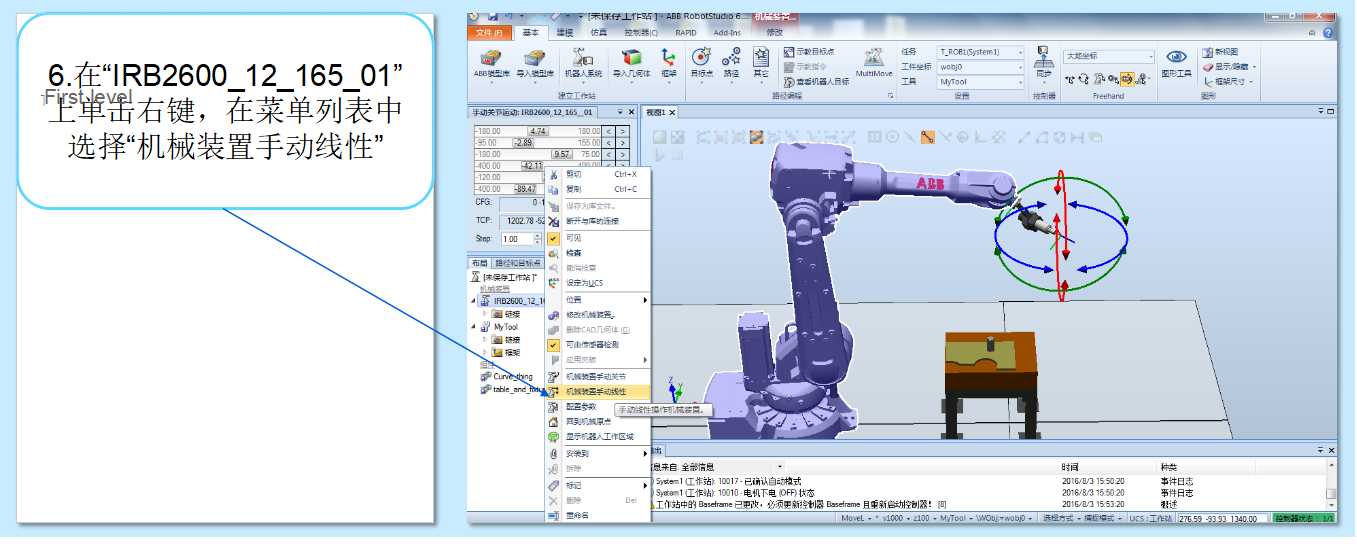
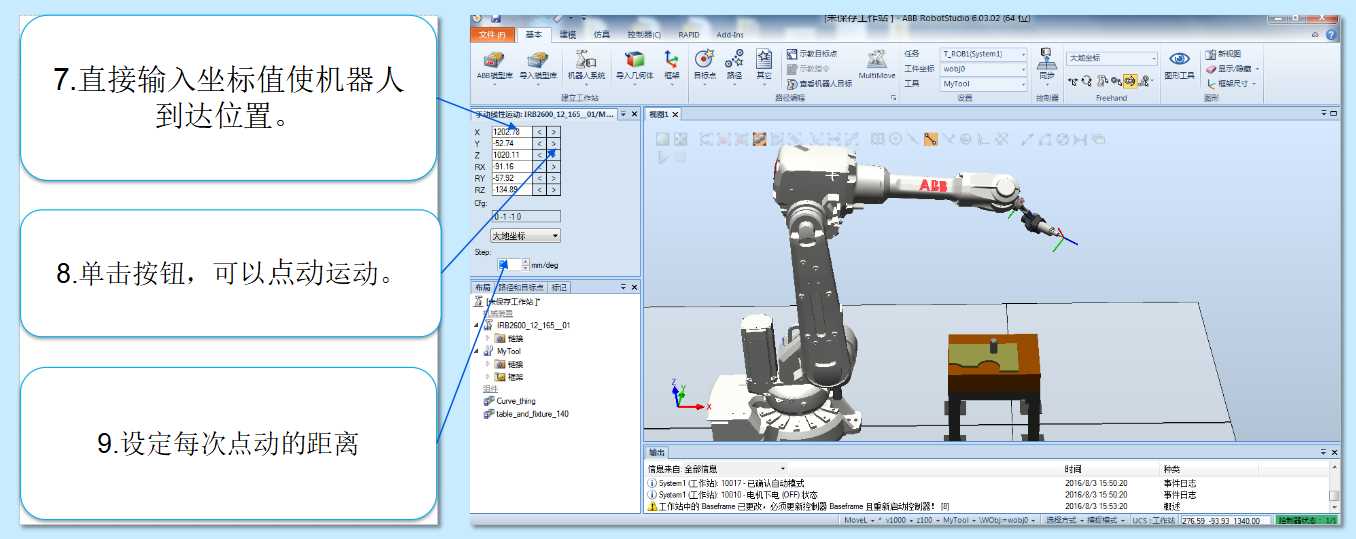
4学会手动操作机器人
一.建立工业机器人系统操作
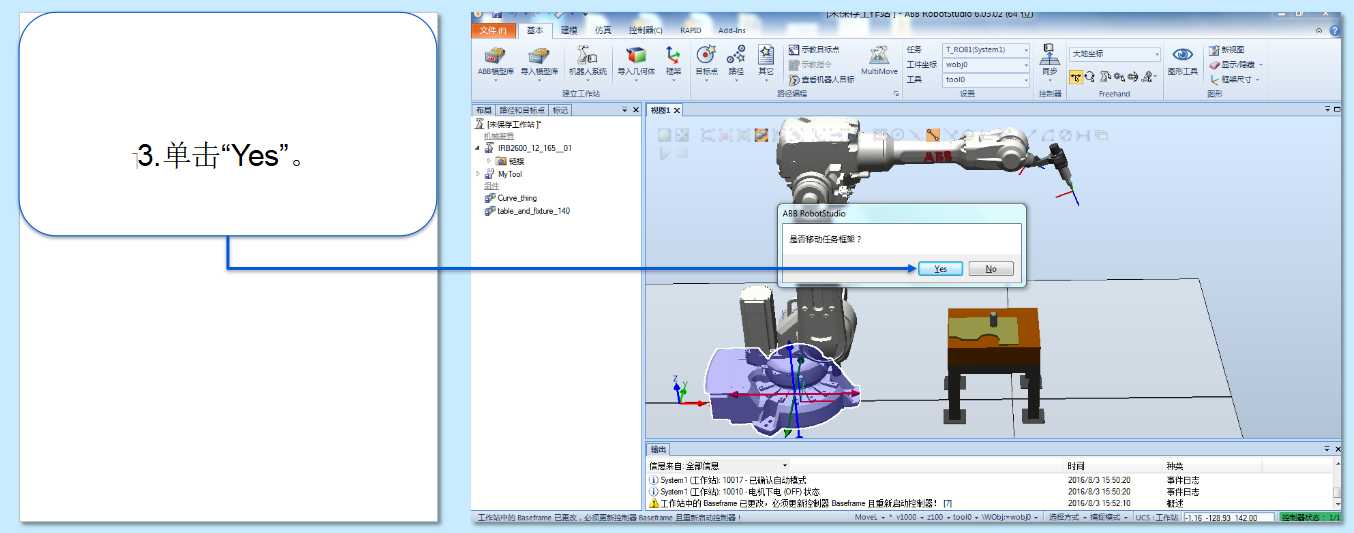
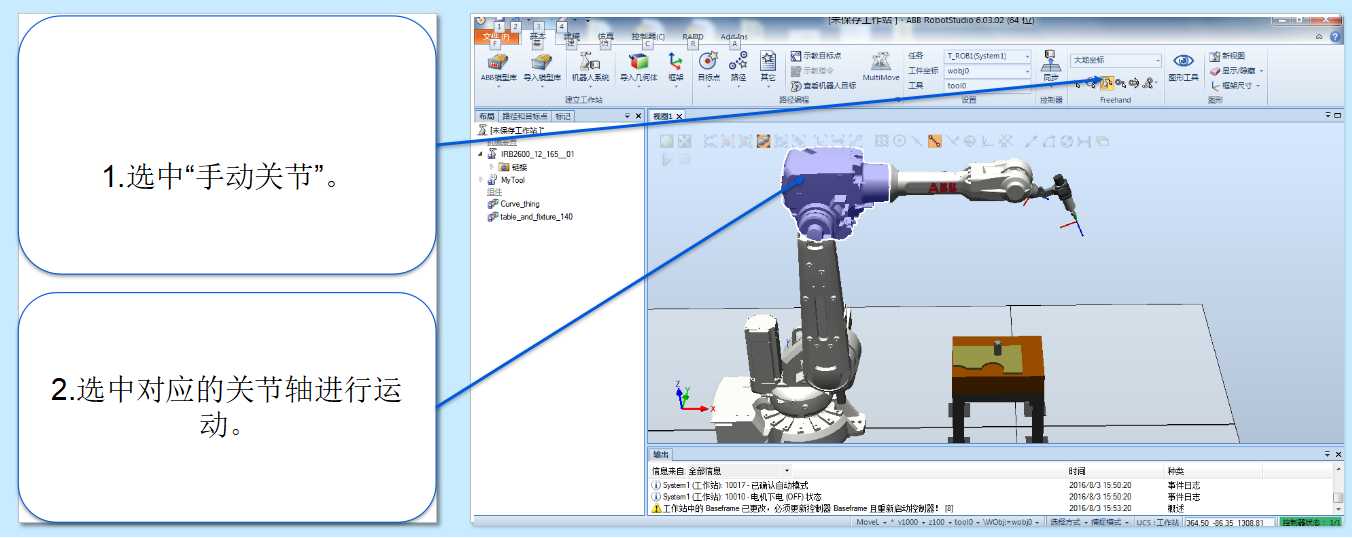
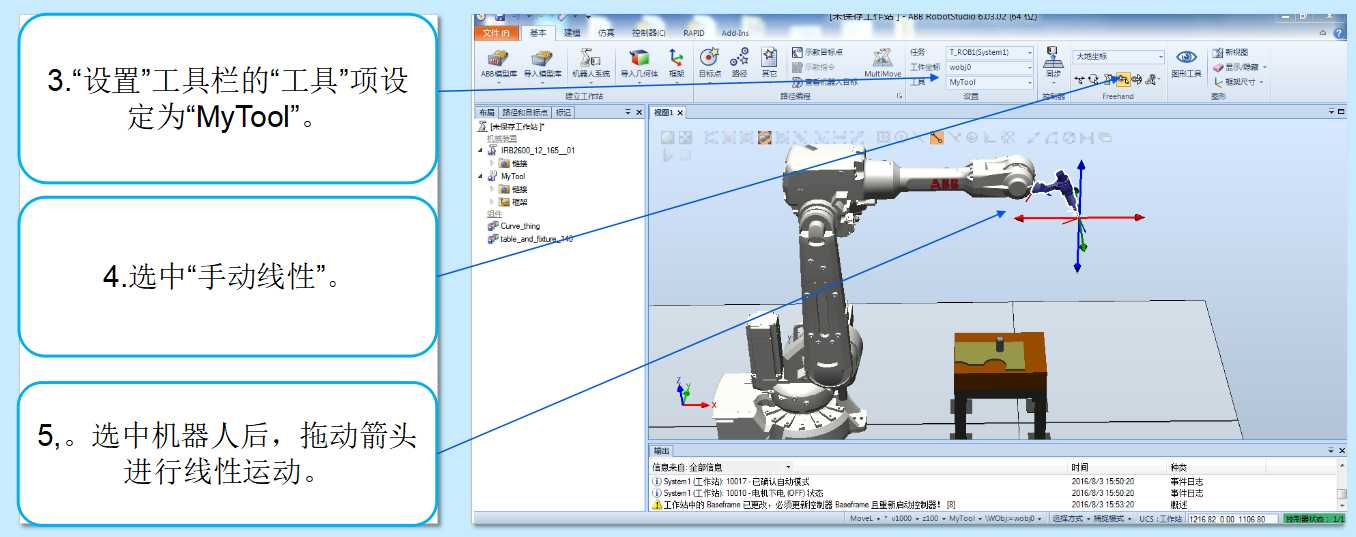
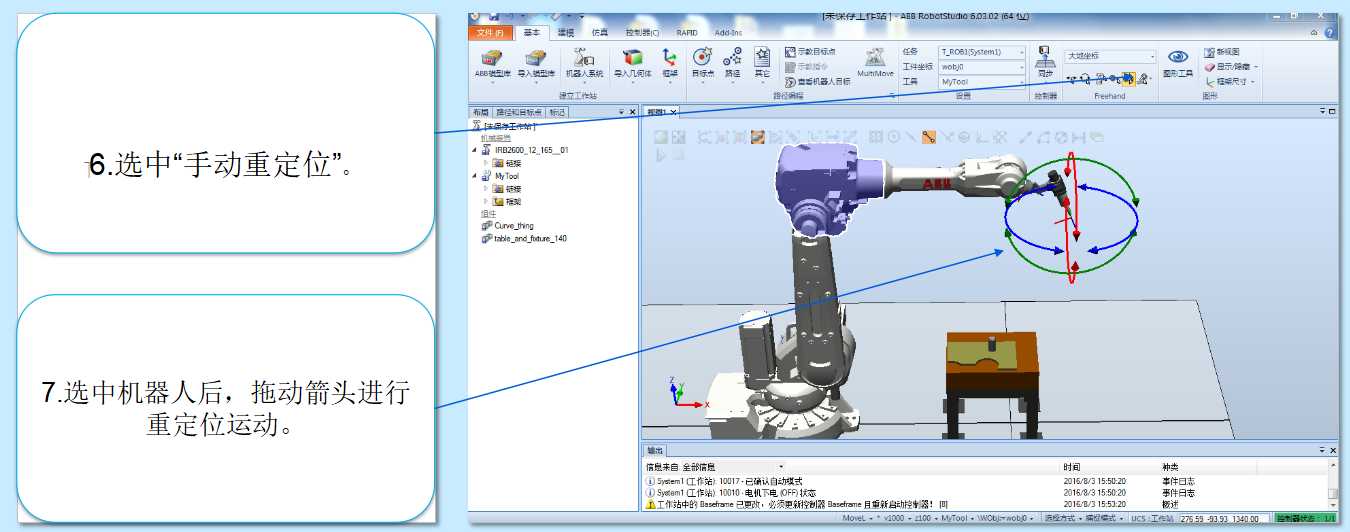
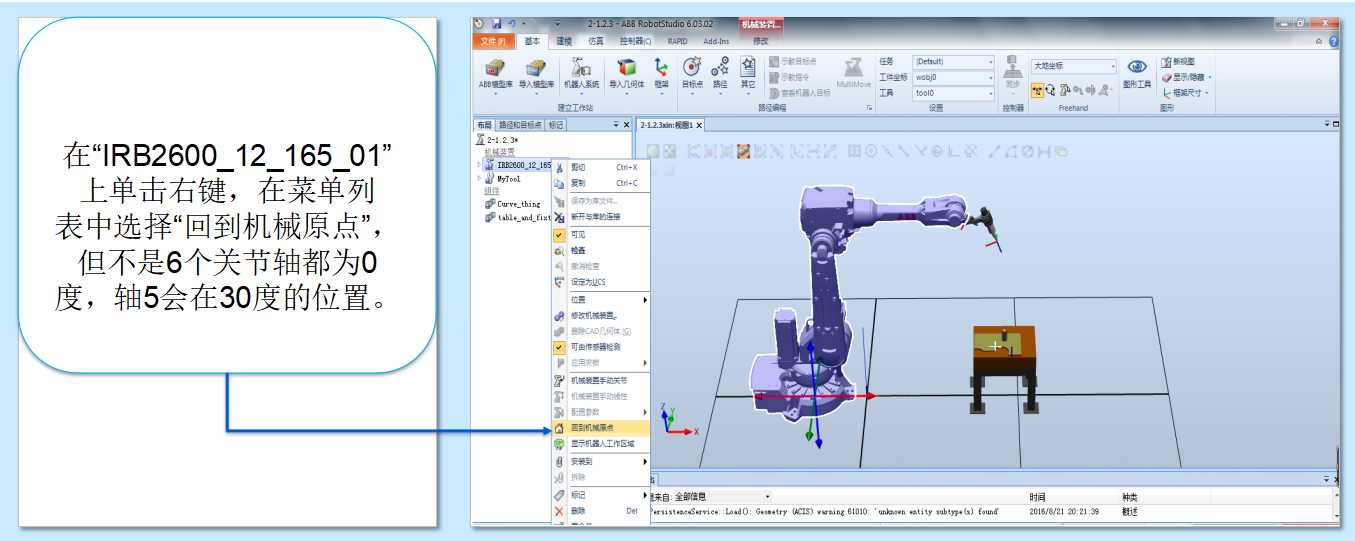
二.工业机器人的手动操纵
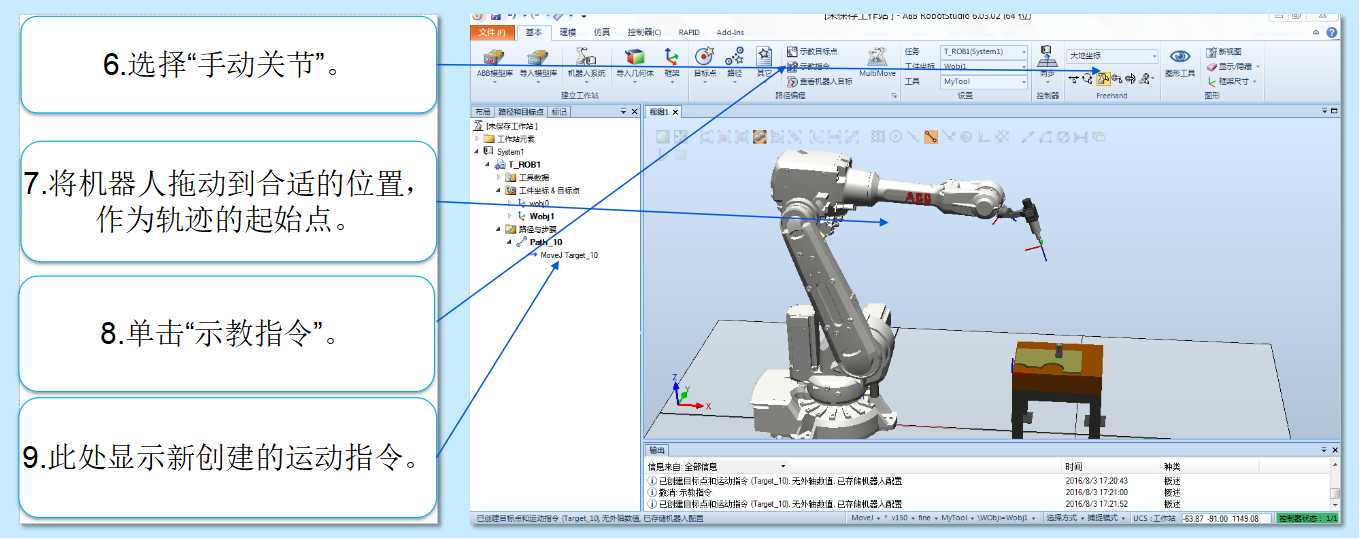
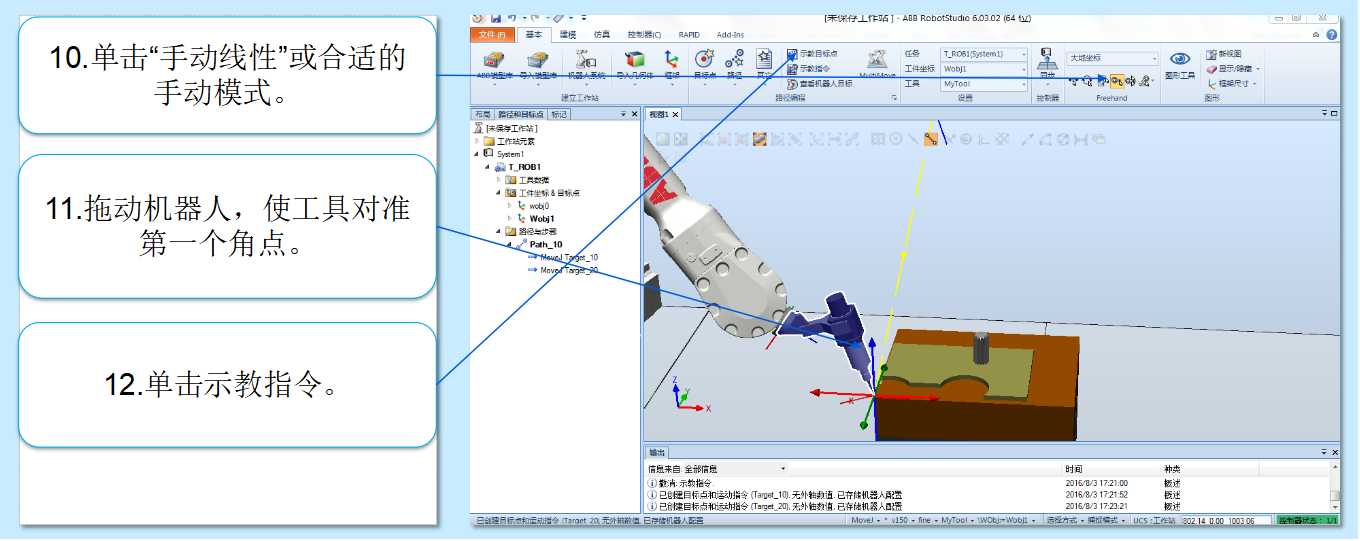
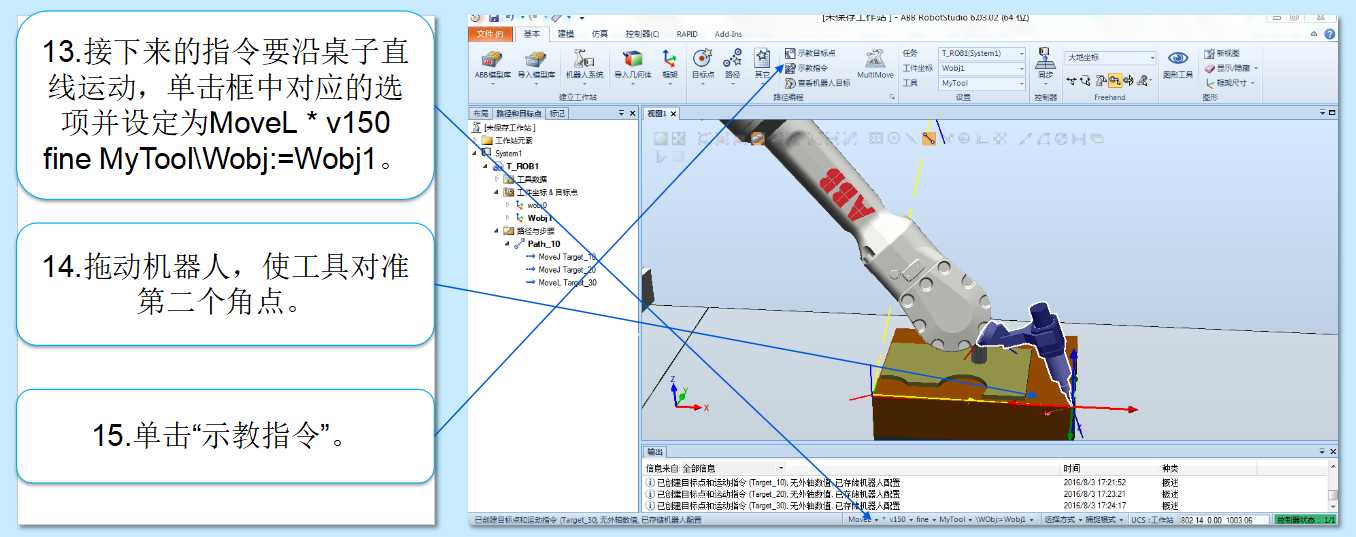
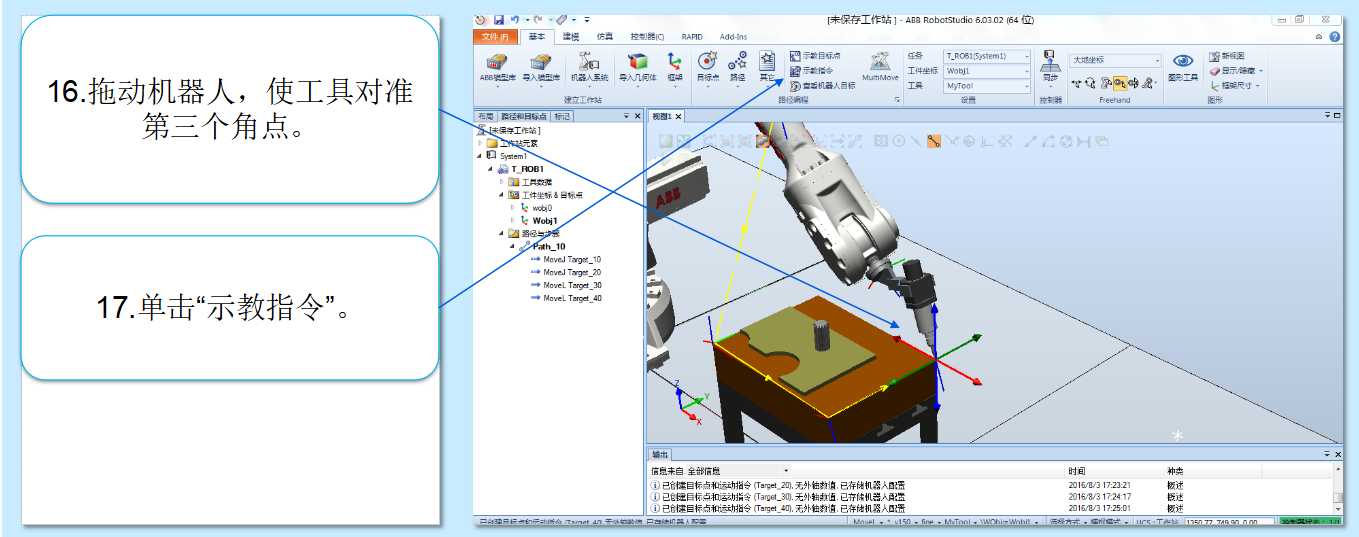
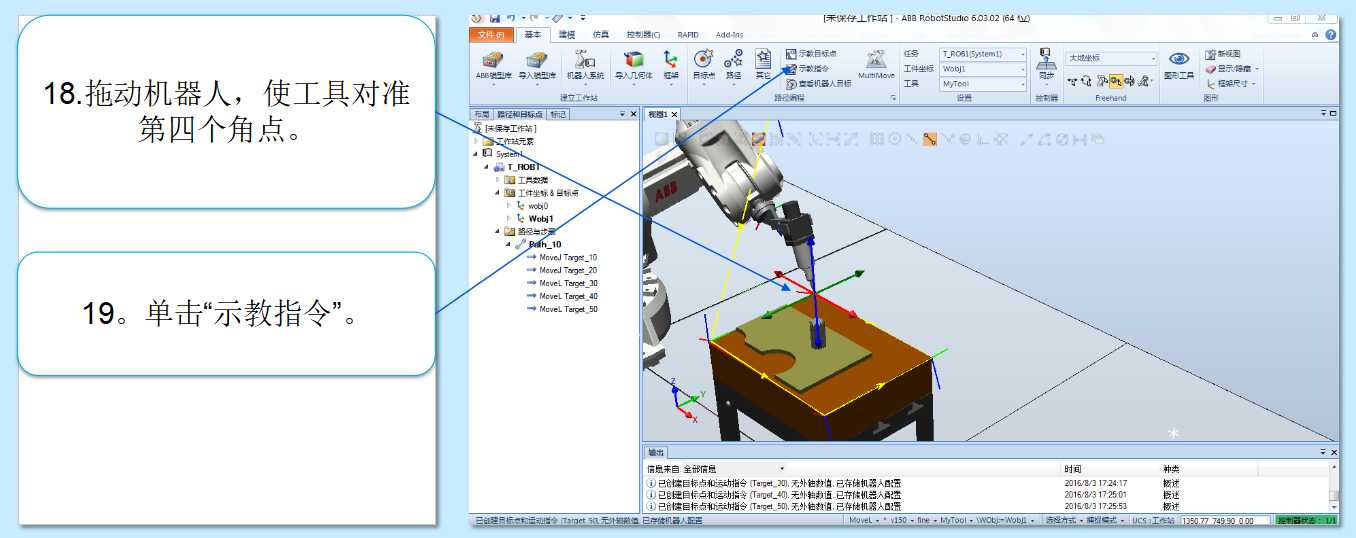
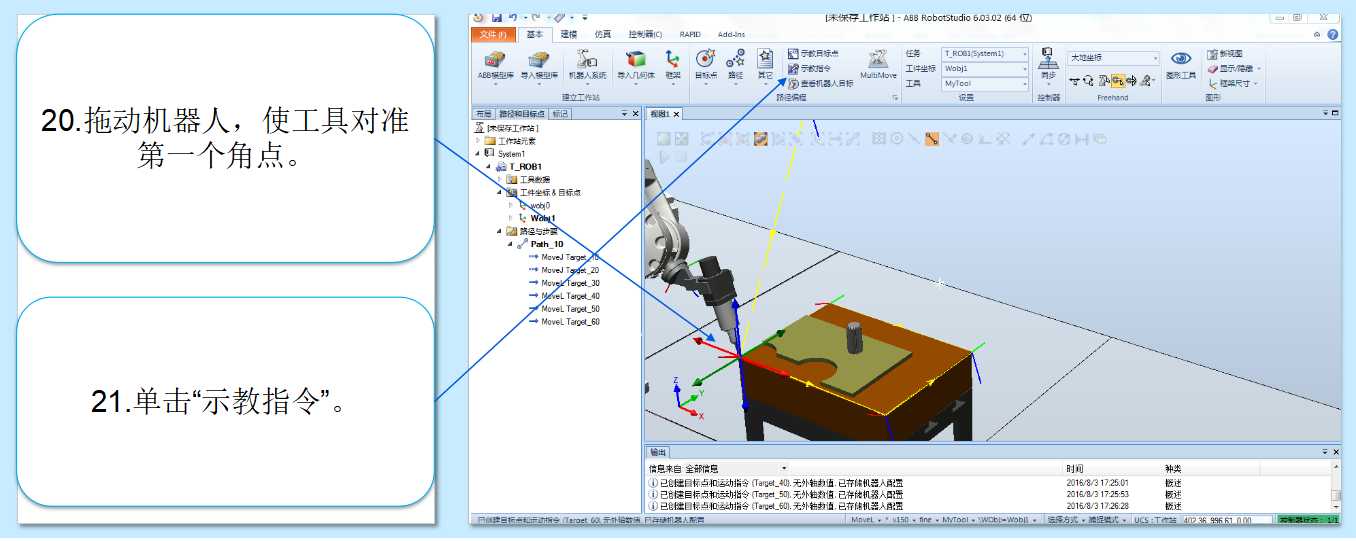
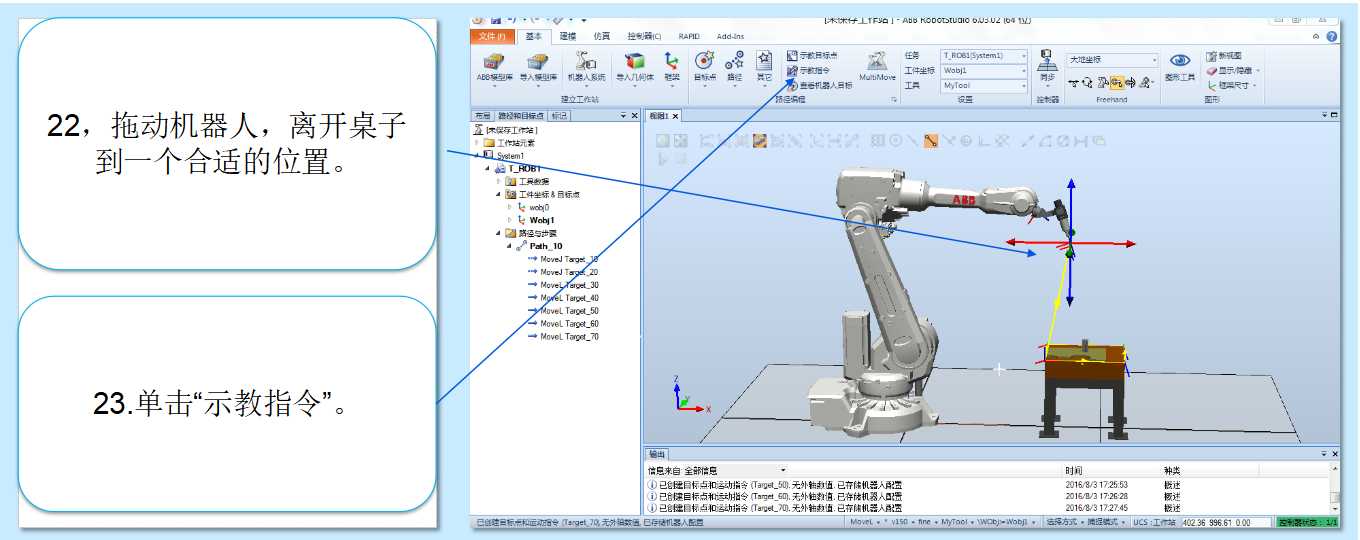
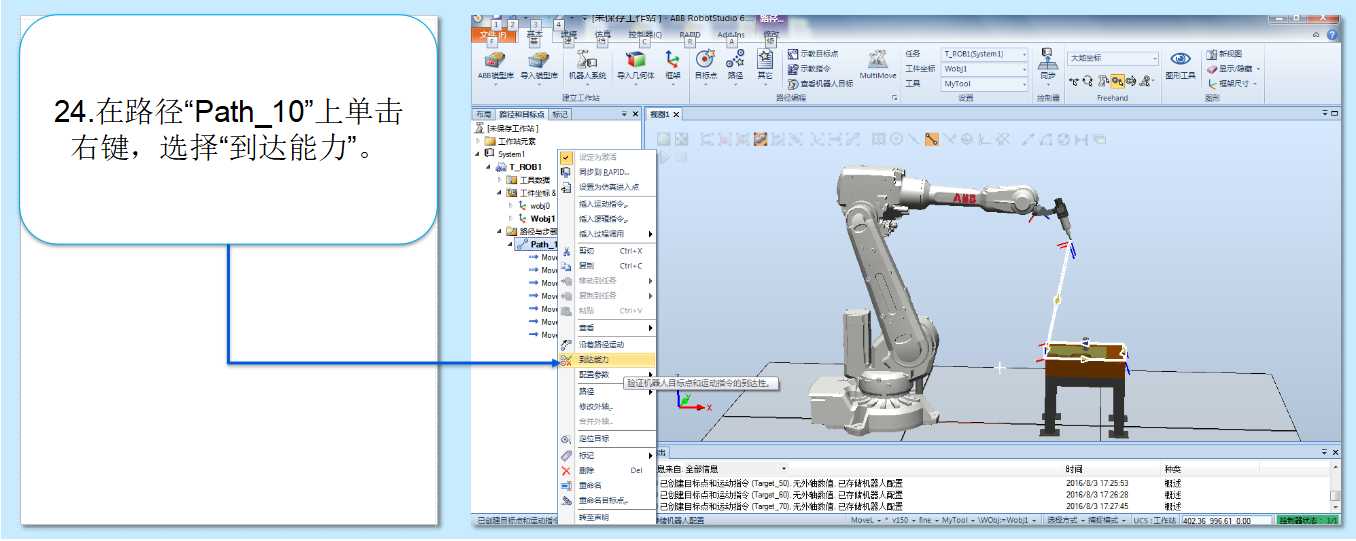
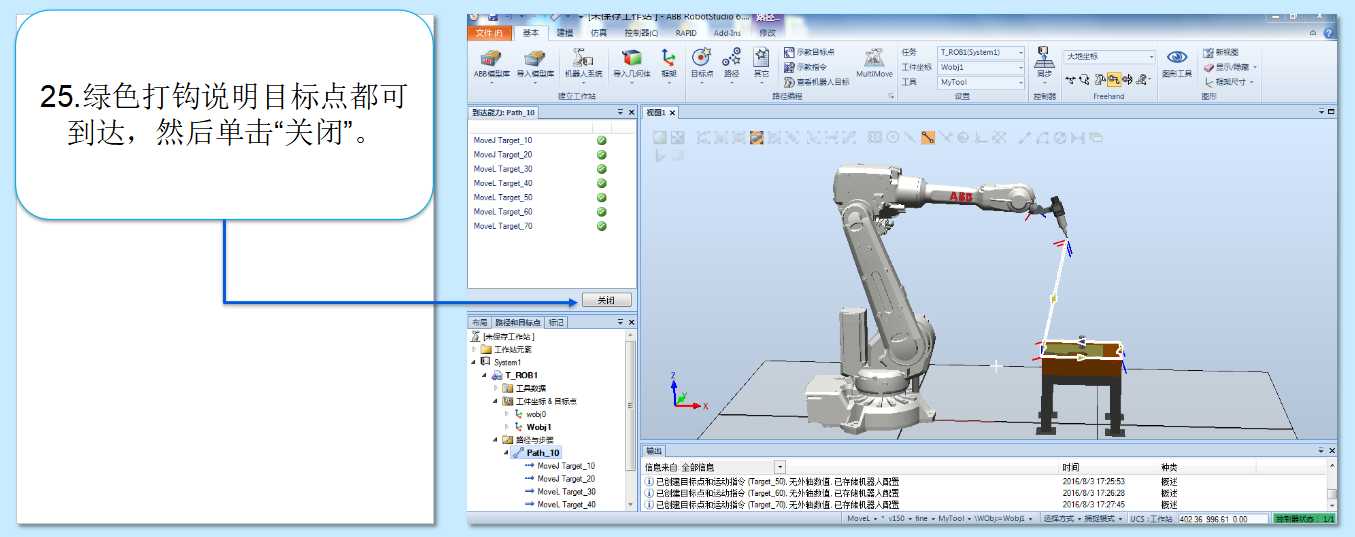
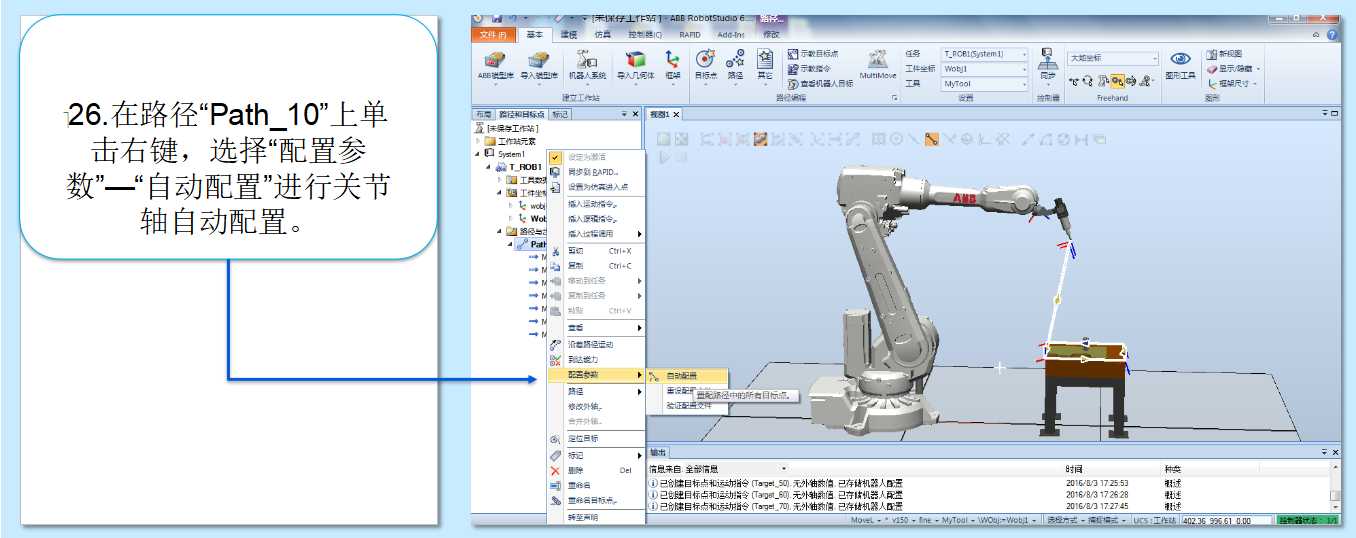
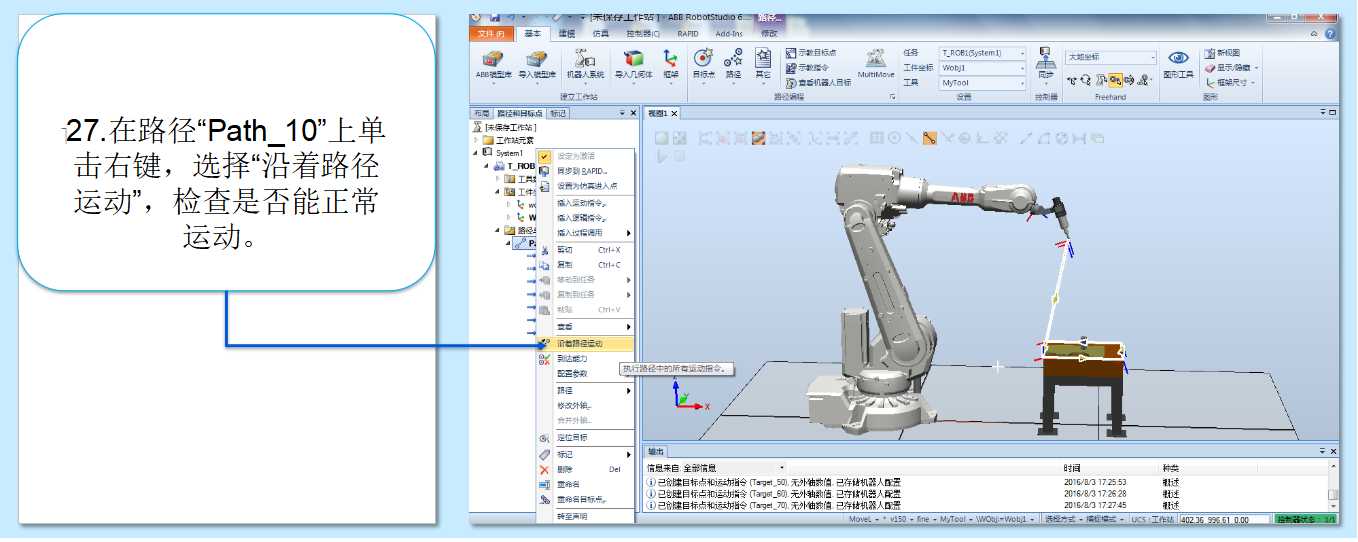
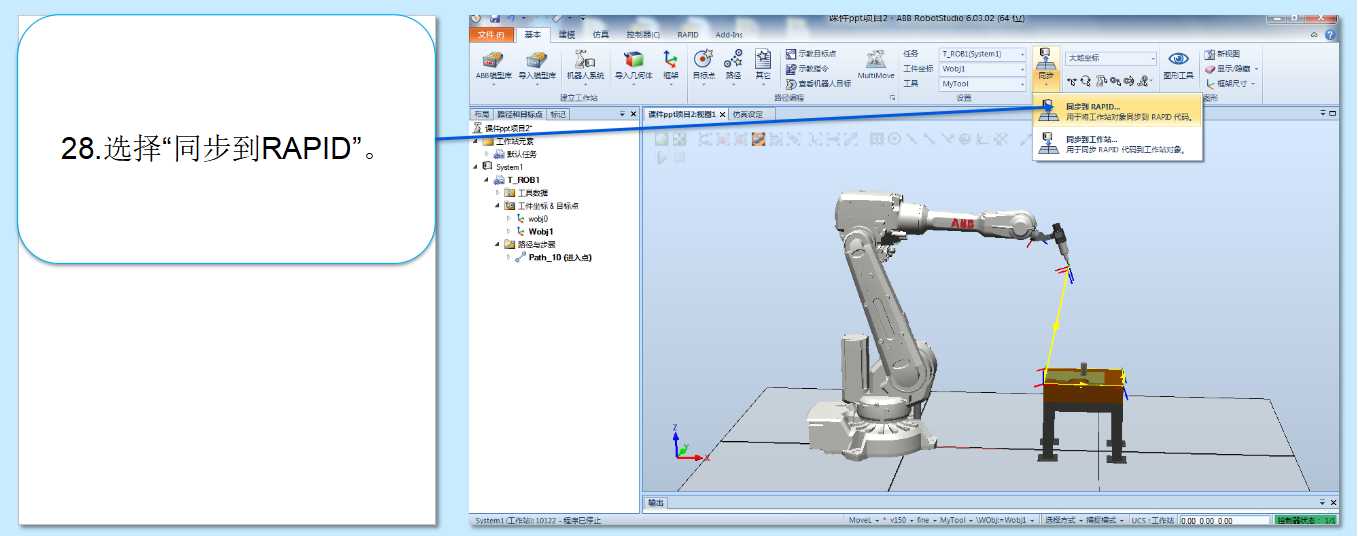
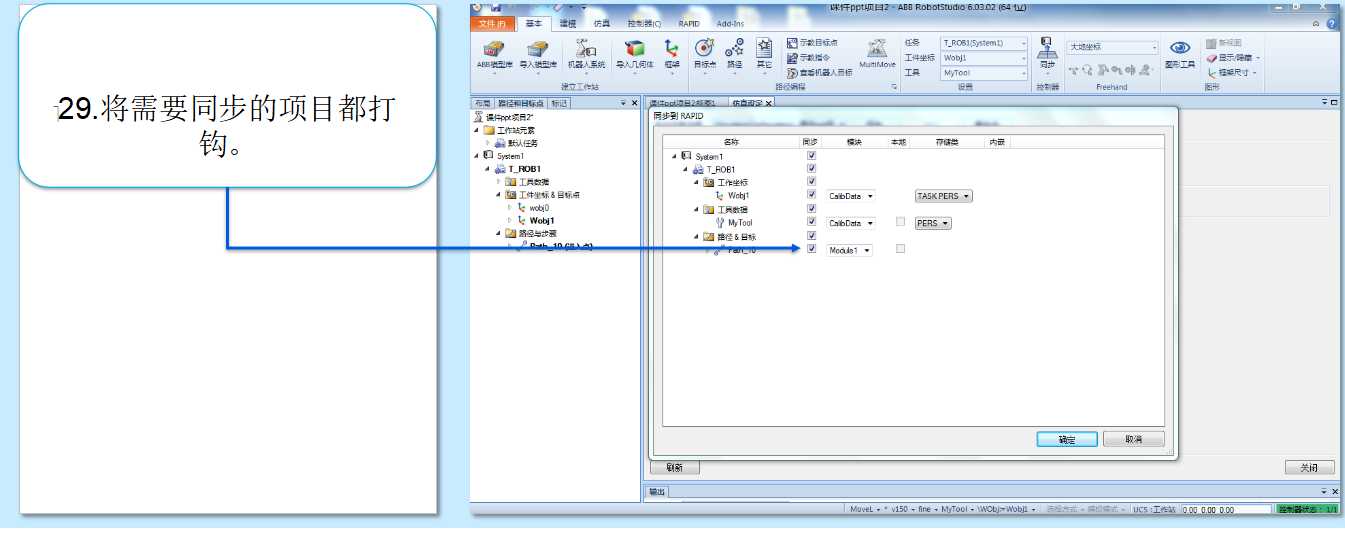
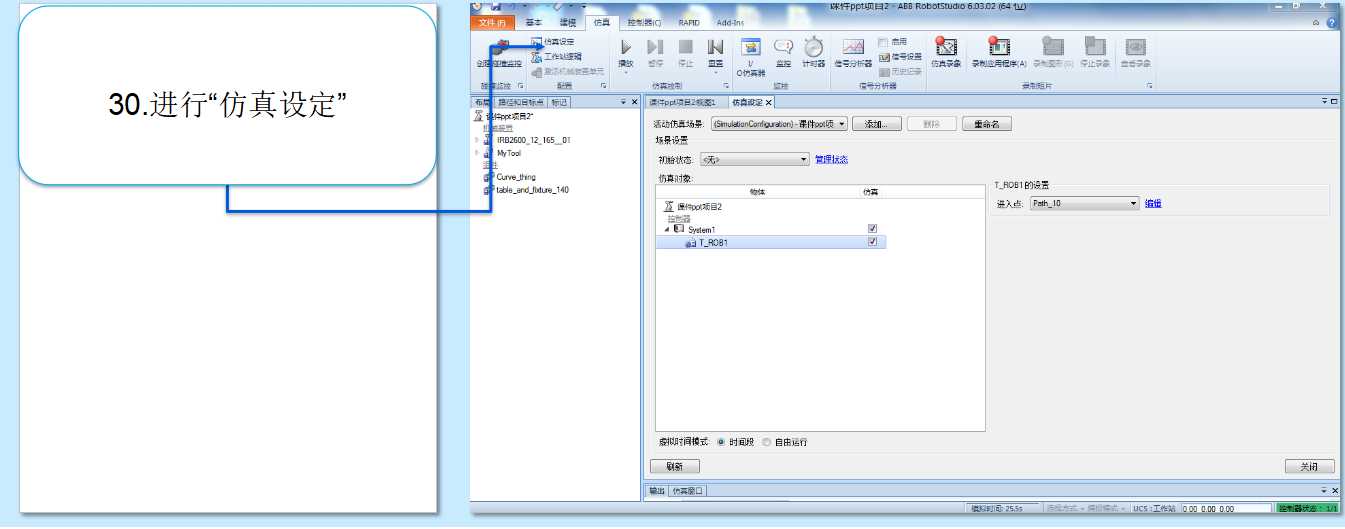
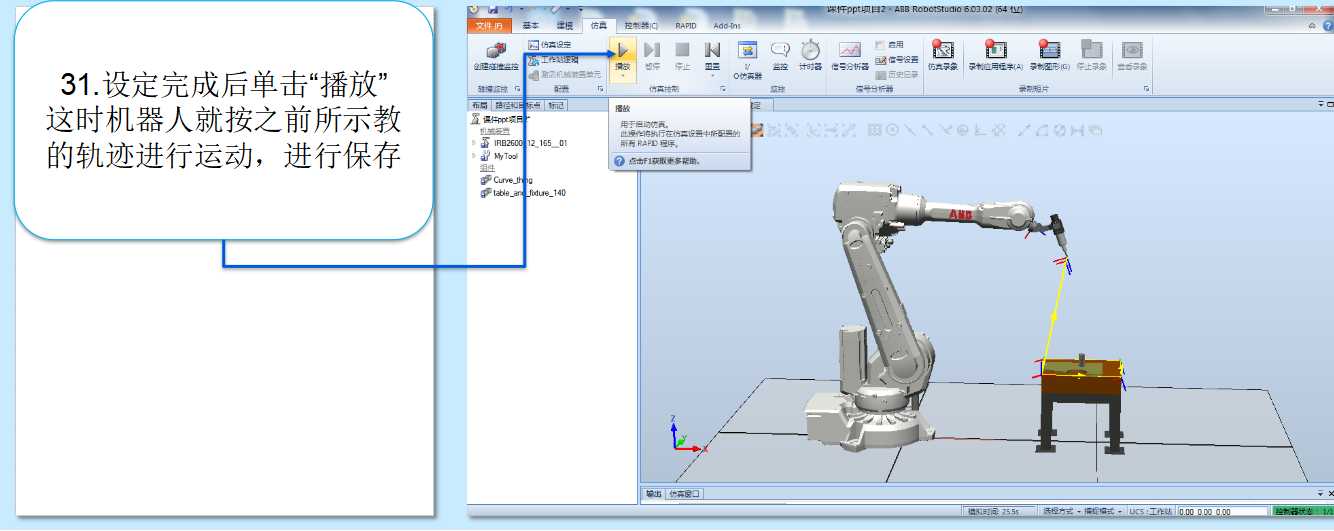
5学会模拟仿真机器人运动轨迹
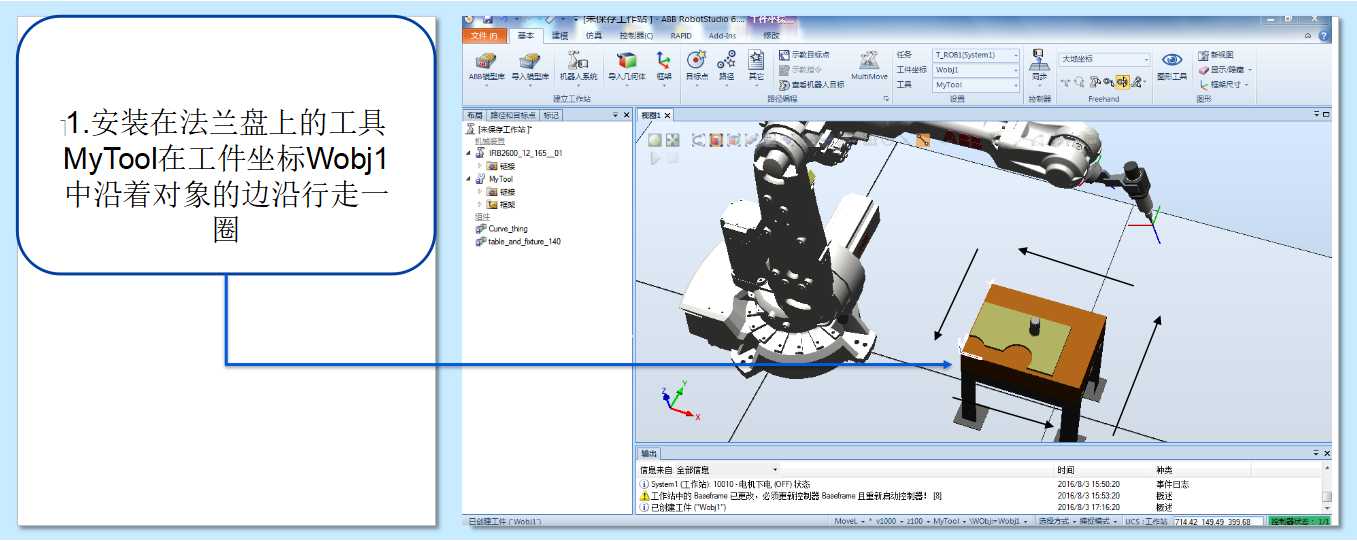
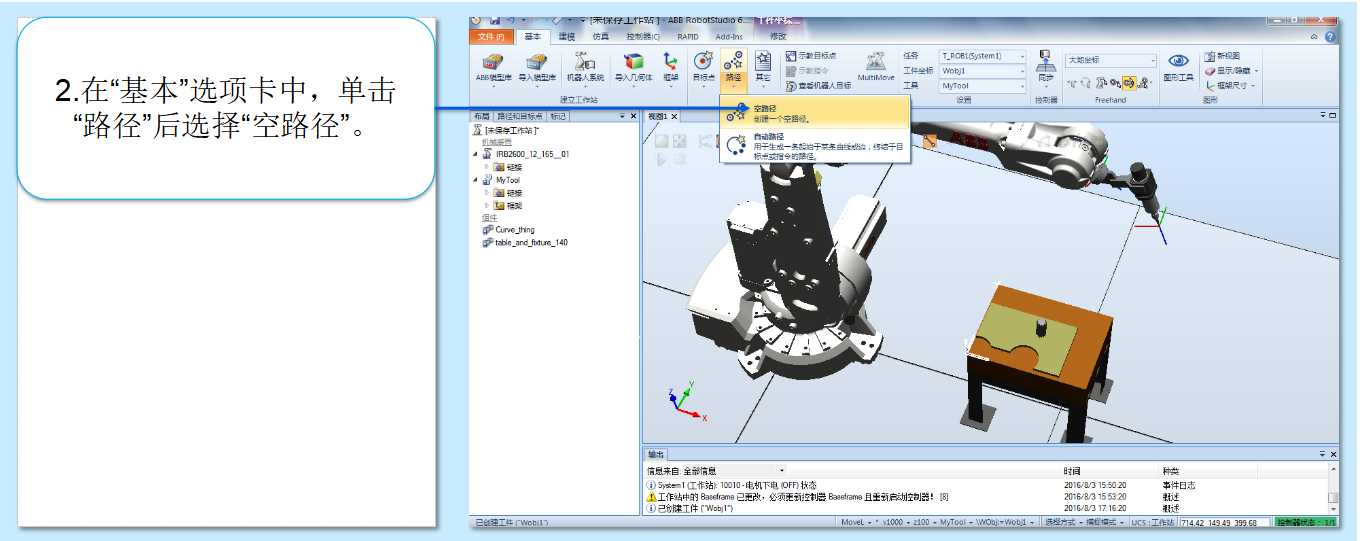
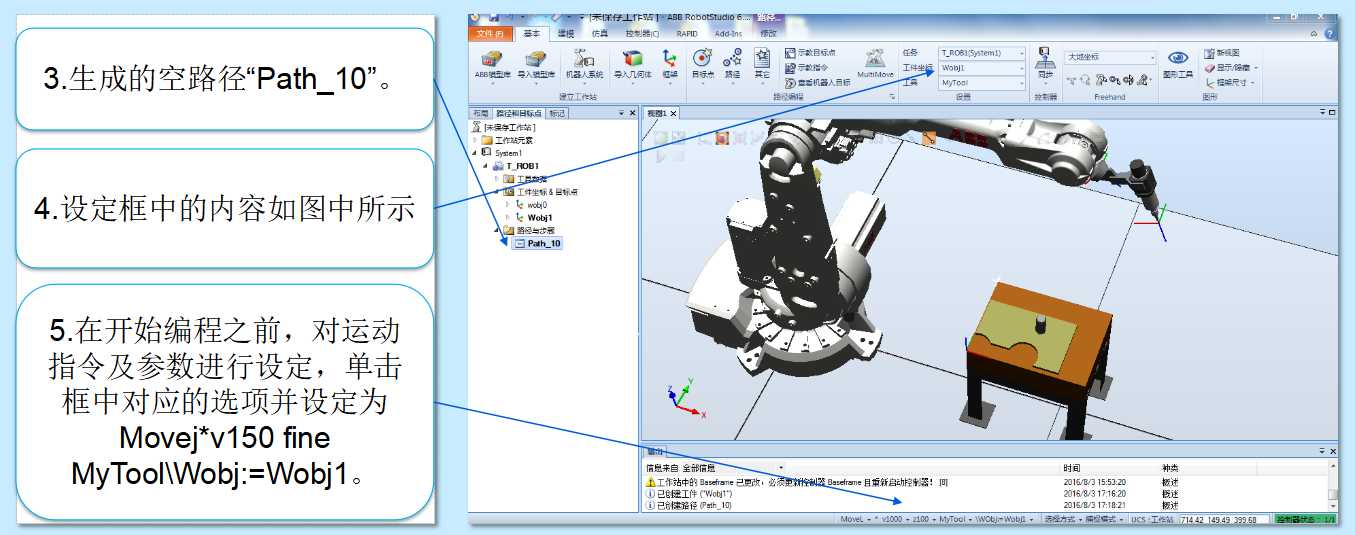
创建工业机器人运动轨迹程序
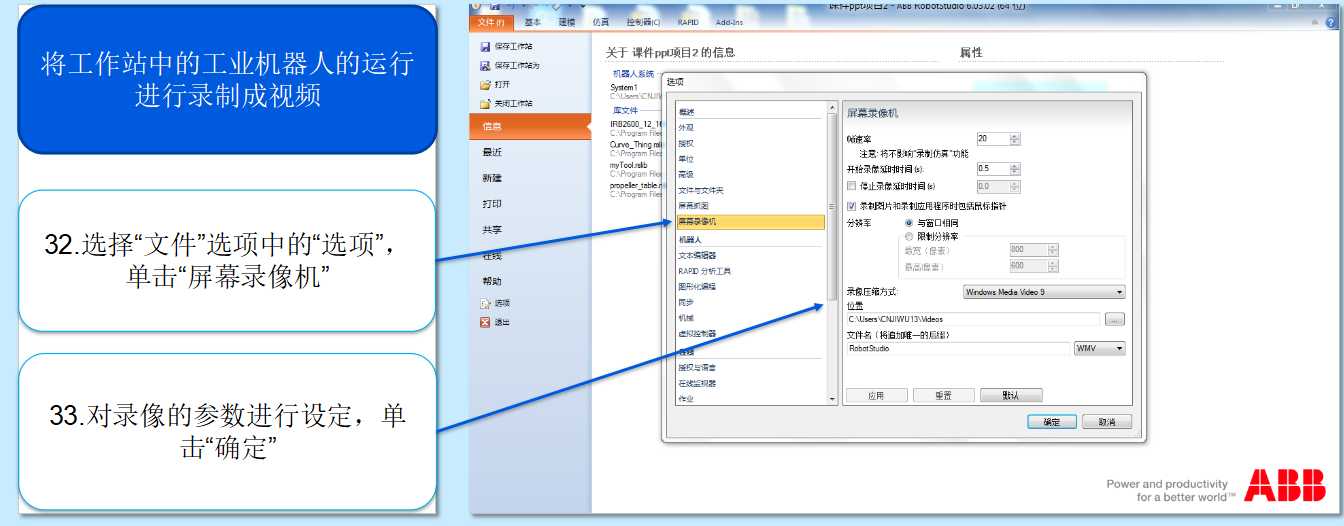
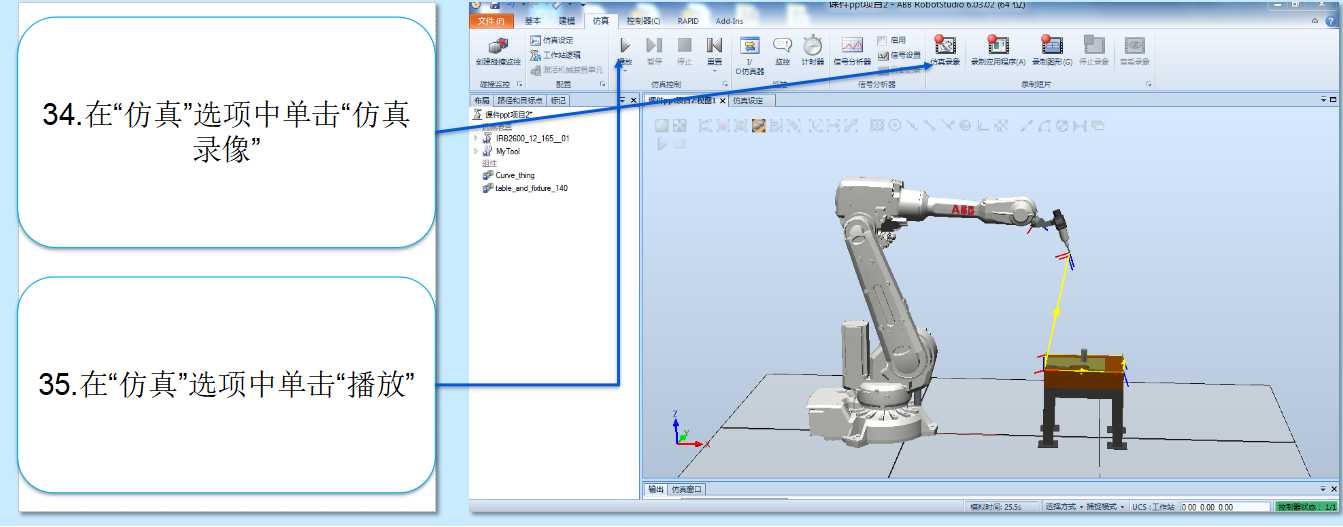
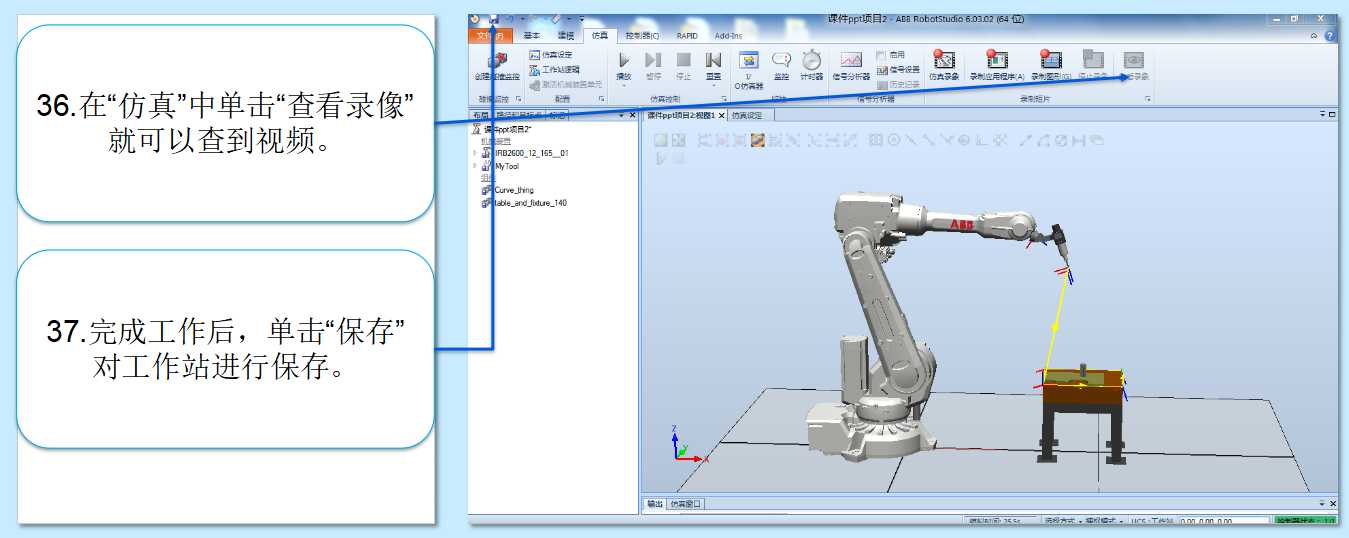
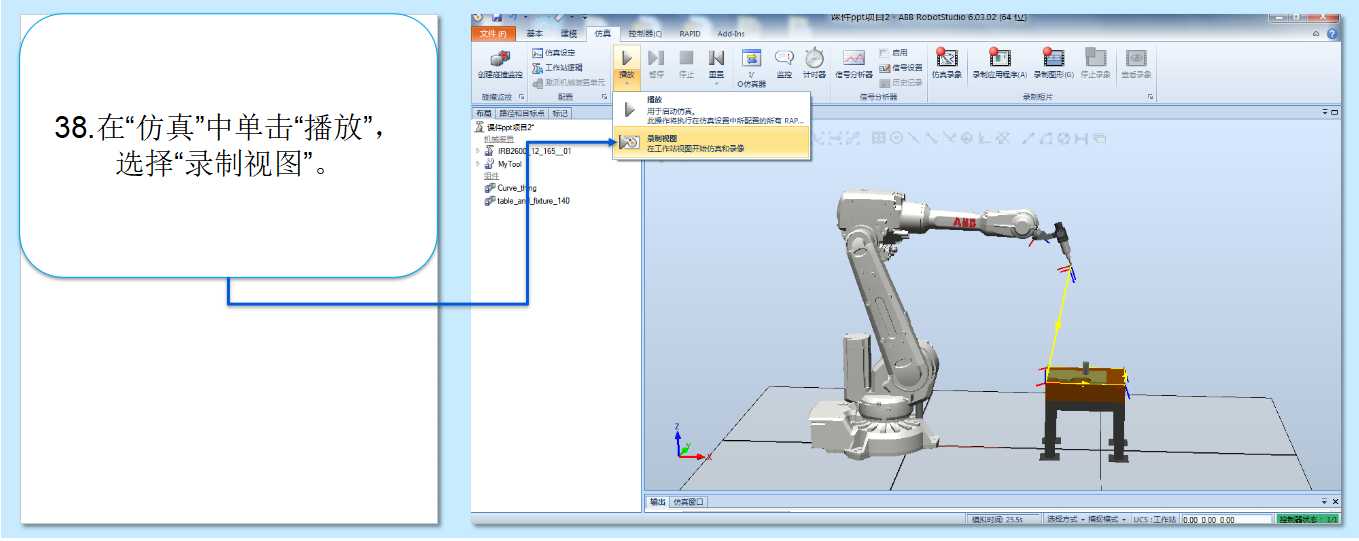
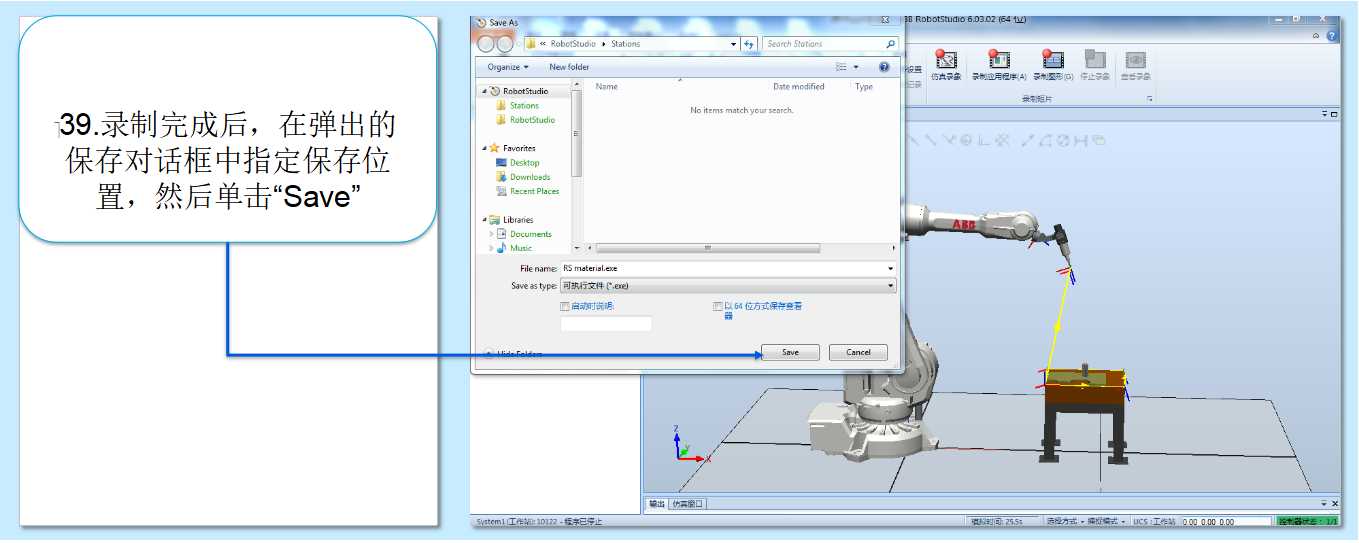
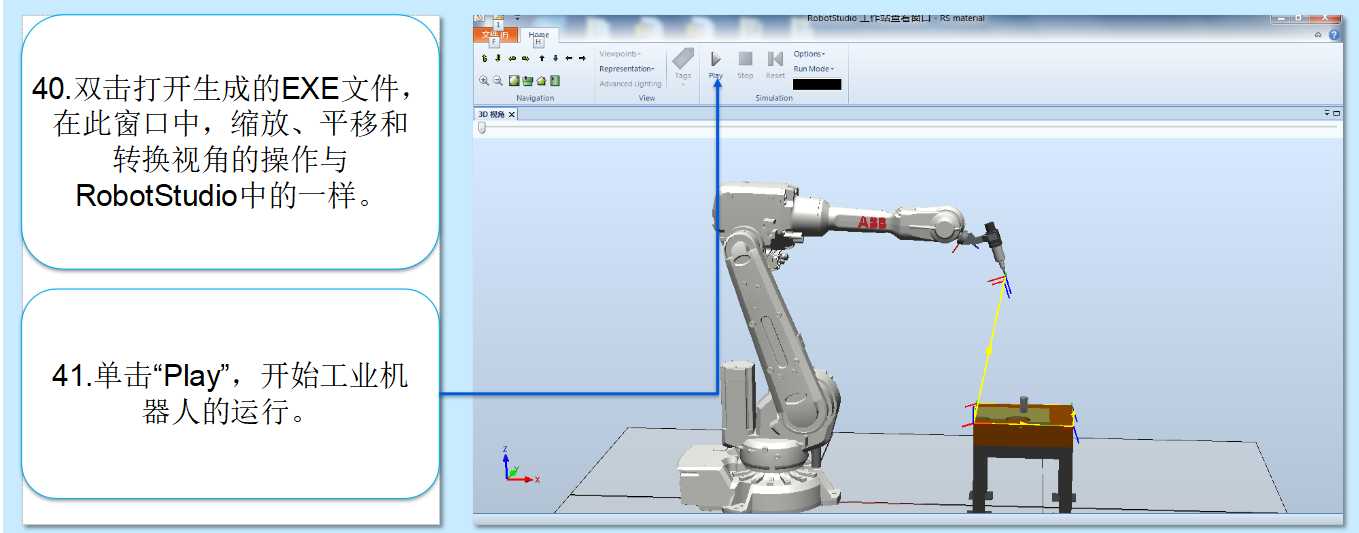
6学会录制视频和制作独立播放EXE文件
二、将机器人的仿真录制成视频

标签:操作 工作站 方法 人工 手动 bsp blog 基本 size
原文地址:http://www.cnblogs.com/renhan1996/p/7396012.html