标签:时间轴 结果 场景 模型 模糊 估计 算法 splay 等价
厚着脸皮要在同事公众号上写篇文章,尽量浅显、与专业相关,选了这个主题。
一、时域与空域特性
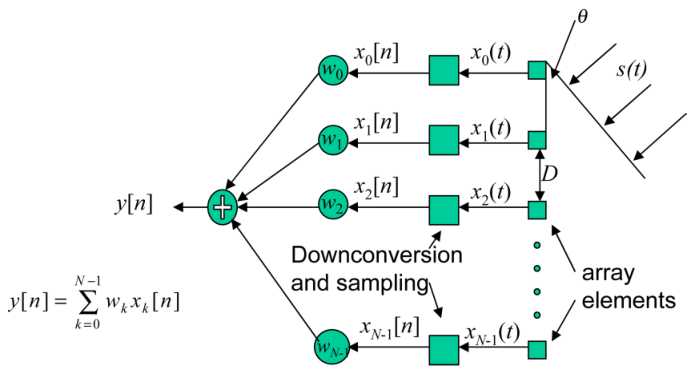
以远场模型(平面波)为例,假设均匀线阵接收的为窄带信号,假设相邻振元间隔为d,入射角为![]() :
:
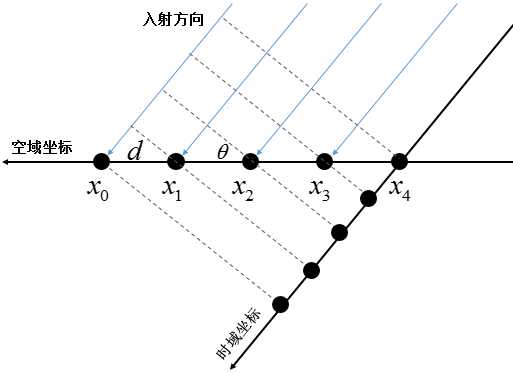
从空域坐标来看,相邻振元的间隔为:![]()
等价到时间轴来看,采样点的间距为:![]() ,对应时间间隔为:
,对应时间间隔为:
二、时、空域与采样定理
A-空域角度理解
相邻振元的相位差为:

以干涉仪为例,如果存在相位模糊,有
k为非零整数,如果希望不出现相位模糊

对应扫描边界 ,则有
,则有

容易证明,同干涉仪一样,均匀线阵谱估计中的导向矢量,如果不满足上面的约束条件,同样会有多峰的问题。
B-时域角度理解
前文提到,采样点对应的时间间隔为,即采样周期。空域均匀线阵对应时域均匀采样,采样频率:
入射信号的频率为:

如果采样无混叠,需要满足Nyquist采样定理:

该约束条件等价于:
可以看出均匀线阵的相位无模糊对应时域均匀采样的奈奎斯特定理。多说一句,如果是非均匀线阵、圆阵等形式,可以理解成对应维度的非均匀采样;从空域角度理解,非均匀阵列可以解决模糊问题,从时域角度理解,稀疏采样/非均匀采样可以突破奈奎斯特采样定理。
三、时、空域及MVDR算法
波束形成主要对感兴趣的方向进行增强/抑制,而谱估计更多是参数估计问题,前者操作多为主动,后者操作多为被动,MVDR算法对二者均适用。这里暂且抛开应用场景,仅从时、空角度理解MVDR的等价性。
接着上文的时域、空域思路,这里先从时域的角度来表述,为了简化均不考虑加窗情形。
A-时域角度理解
对于N点均匀采样的信号 ,对其进行傅里叶变换:
,对其进行傅里叶变换:
的相关函数为:

容易证明有如下对应关系:

而相关函数对应的傅里叶变换为功率谱密度,可以求解功率谱密度:
B-空域角度理解
N个均匀线阵接收单元,对应的波束形成为:
即空域的波束形成可以理解为时域的傅里叶变换,
从而空域的功率谱密度可以等价为:
考虑到时域、空域具有等价性,空域的功率谱这么理解是合理的。
现在以常用的MVDR算法来理解这种等价性(MUSIC等谱估计算法的谱与波束形成完全不同,这里仅从时、空等价性上讨论“谱”的概念):
接收信号:

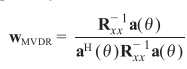
MVDR就是含有等式约束的最优化问题:

可以求解:
这个时候,如果将最优的w带入y,空域角度理解:y对应就是波束形成的结果。时域角度理解:y对应为傅里叶变换的结果。
通常MVDR的结果为 的输出,根据上文分析可知,该结果从时域理解就是功率谱(差一个常数),所以从空域角度称作“谱”其实也是可以被接受的,对应功率(谱):
的输出,根据上文分析可知,该结果从时域理解就是功率谱(差一个常数),所以从空域角度称作“谱”其实也是可以被接受的,对应功率(谱):
因为这是在空域,为了与时域功率谱的名字加以区别,可以称其为空间谱。
具体空间谱名称怎么由来,本文并没有考证。本文只是提供了一种理解“空间谱”名称的角度,至少MUSIC等算法的“谱”便与此不同,或许MUSIC等算法只是继承了“空间谱”这个名词也未可知。
标签:时间轴 结果 场景 模型 模糊 估计 算法 splay 等价
原文地址:http://www.cnblogs.com/xingshansi/p/7450840.html