标签:play 空间 sha lin width 简单 blank link 数据
作者:桂。
时间:2017-09-09 16:44:12
链接:http://www.cnblogs.com/xingshansi/p/7413133.html
主要理论空间平滑算法,首先分析相干信号特性。
〇、相干信号特性
以两个信号为例

求相关矩阵

如果两个信号的相关系数ρ满足:
1)ρ=0,则认为两信号不相关;
2)0<ρ<1,则认为两信号相关;
3)ρ = 1,则两信号相干。
当两信号相干时,ρ=1,对于相关矩阵:

 秩为1,这就造成了秩亏,对于子空间等空间谱估计算法便不再适用。
秩为1,这就造成了秩亏,对于子空间等空间谱估计算法便不再适用。
也可以换个角度理解:

两信号相干时,有 ,此时
,此时

b称为广义阵列流行或广义导向矢量。可以看出它通常并不对应两个来波方向,而是二者的矢量叠加方向。一般的思路是希望将秩亏缺加以恢复。
这里主要记录空间平滑算法。对于宽带信号,如果利用聚焦矩阵的思想,是不需要空间平滑的,具体可以参考宽带信号的处理思路。结合前文的时、空对偶特性,可以更好地理解前向、后项平滑算法。
平滑算法主要基于均匀线阵。
一、前向平滑算法
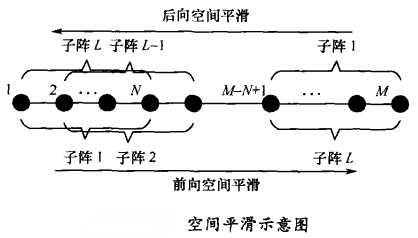
对于具有Vandermonde结构的阵列信号,接收单元的信号可表示为:

其中D为:

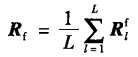
第l个子阵前向的相关矩阵:

平滑后的相关
只要满足:快排数snap>=信号个数K,且子阵阵元数M>K,子阵个数N>=K即可。
这是通过信号到达不同子阵的相位差不同,利用平滑恢复秩,降低了有效孔径个数。
二、后向平滑算法
从时域角度来看:实数信号对应的傅里叶变换,共轭对称,其实后向平滑本质也是这个思路。
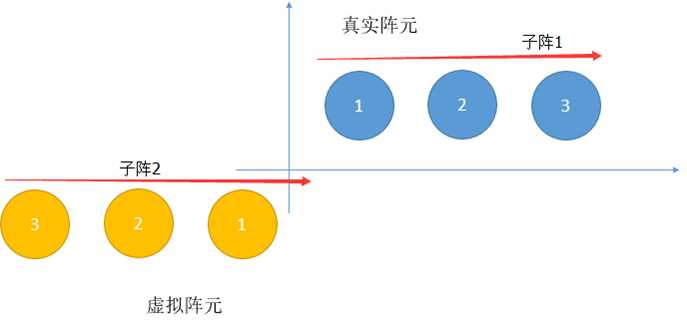
也可以简单分析一下:假设入射方向r = (sin(theta)cos(phi),sin(theta)sin(phi),cos(theta)),真实阵元的坐标为(x,y,0),则对应镜像对称的坐标为(-x,-y,0),从而距离就是相反的关系,也就是相位相反,体现在数据上就是共轭。有镜像之后,顺序是反过来的,所以后向平滑等价于:前向平滑的镜像对称。虽然镜像并没有创造新的振元,但是镜像之后相当于创造了新的入射方向,从而增加了子阵个数,镜像是布阵非常有用的思想。
只要满足:快排数snap>=信号个数K,且子阵阵元数M>K,子阵个数N>=K即可。
也就容易得出,后项平滑的思路:
三、前后项平滑算法
前向是利用了阵元,后向平滑是利用了镜像,前后项则二者都使用。
只要满足:快排数snap>=信号个数K,且子阵阵元数M>K,子阵个数2N>=K即可。
四、空间平滑的思路延展
其实布阵结构不限于Vandermonde形式,一种思路是利用虚拟变换,
例如UCA(均匀圆阵)便不具备Vandermonde形式,

可以对其进行变换:

可以使得变换之后的导向矢量具有Vandermonde的形式:

这就创造了可以空间平滑的基础。
即使不用虚拟变换,通过上面的思路分析,可以得出结论:任意阵列都可以利用空间平滑算法解相干,这一点将另写一篇文章介绍思路。
标签:play 空间 sha lin width 简单 blank link 数据
原文地址:http://www.cnblogs.com/xingshansi/p/7413133.html