标签:minimal clone form tin different lin sam note lock
Harris、Shi-Tomasi和亚像素角点都是角点,隶属于特征点这个大类(特征点可以分为边缘、角点、斑点).
| void cv::cornerHarris | ( | InputArray | src, //需要为8位单通道 |
| OutputArray | dst, //结果 | ||
| int | blockSize, //领域大小 | ||
| int | ksize, //Sobel孔径大小 | ||
| double | k, //Harris参数 | ||
| int | borderType = BORDER_DEFAULT |
||
| ) |
Harris corner detector.
The function runs the Harris corner detector on the image. Similarly to cornerMinEigenVal and cornerEigenValsAndVecs , for each pixel (x, y) it calculates a 2\times2 gradient covariance matrix M^{(x,y)} over a \texttt{blockSize} \times \texttt{blockSize} neighborhood. Then, it computes the following characteristic:
 (特征点计算方法)
(特征点计算方法)
Corners in the image can be found as the local maxima of this response map.
| src | Input single-channel 8-bit or floating-point image. |
| dst | Image to store the Harris detector responses. It has the type CV_32FC1 and the same size as src . |
| blockSize | Neighborhood size (see the details on cornerEigenValsAndVecs ). |
| ksize | Aperture parameter for the Sobel operator. |
| k | Harris detector free parameter. See the formula below. |
| borderType | Pixel extrapolation method. See cv::BorderTypes. |

| void cv::goodFeaturesToTrack | ( | InputArray | image,//输入图像 |
| OutputArray | corners,//输出向量 | ||
| int | maxCorners,//角点最大数量 | ||
| double | qualityLevel,//角点检测可接受的最小特征值 | ||
| double | minDistance,//角点之间的最小距离 | ||
| InputArray | mask = noArray(),//感兴趣区域 |
||
| int | blockSize = 3,//领域范围 |
||
| bool | useHarrisDetector = false,//true为harris;false为Shi-Tomasi |
||
| double | k = 0.04 //权重系数 |
||
| ) |
Determines strong corners on an image.
The function finds the most prominent corners in the image or in the specified image region, as described in [154]
The function can be used to initialize a point-based tracker of an object.
| image | Input 8-bit or floating-point 32-bit, single-channel image. |
| corners | Output vector of detected corners. |
| maxCorners | Maximum number of corners to return. If there are more corners than are found, the strongest of them is returned. maxCorners <= 0 implies that no limit on the maximum is set and all detected corners are returned. |
| qualityLevel | Parameter characterizing the minimal accepted quality of image corners. The parameter value is multiplied by the best corner quality measure, which is the minimal eigenvalue (see cornerMinEigenVal ) or the Harris function response (see cornerHarris ). The corners with the quality measure less than the product are rejected. For example, if the best corner has the quality measure = 1500, and the qualityLevel=0.01 , then all the corners with the quality measure less than 15 are rejected. |
| minDistance | Minimum possible Euclidean distance between the returned corners. |
| mask | Optional region of interest. If the image is not empty (it needs to have the type CV_8UC1 and the same size as image ), it specifies the region in which the corners are detected. |
| blockSize | Size of an average block for computing a derivative covariation matrix over each pixel neighborhood. See cornerEigenValsAndVecs . |
| useHarrisDetector | Parameter indicating whether to use a Harris detector (see cornerHarris) or cornerMinEigenVal. |
| k | Free parameter of the Harris detector. |
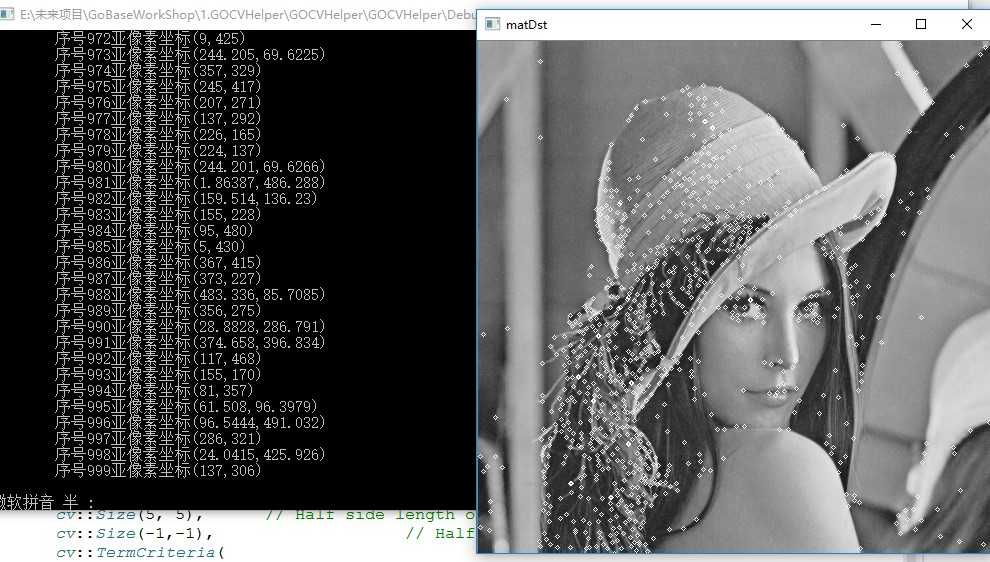
| void cv::cornerSubPix | ( | InputArray | image, |
| InputOutputArray | corners, | ||
| Size | winSize, | ||
| Size | zeroZone, | ||
| TermCriteria | criteria | ||
| ) |
标签:minimal clone form tin different lin sam note lock
原文地址:http://www.cnblogs.com/jsxyhelu/p/7522441.html