标签:discus 放大 project href queue original tin 解决 没有
基于陈老师提供的Hello_RTOS工程:
qemu 2.8.0
arm-none-eabi-gcc 4.8.2
下载工程并编译
1 git clone https://github.com/cbhust/STM32F429_Discovery_FreeRTOS_9.git 2 cd STM32F429_Discovery_FreeRTOS_9/Projects/Hello_RTOS/ 3 make
选用STM32F429I-Discovery为系统板,调用qemu仿真。
1 qemu-system-gnuarmeclipse --board STM32F429I-Discovery -d unimp,guest_errors --image hello_rtos.elf
--board STM32F429I-Discovery 选择系统板
-d unimp,guest_errors 设置需要记录的项目
--image hello_rtos.elf 选择系统镜像
出现如下错误:

经查询,这条错误信息是由于qemu不支持硬浮点
https://sourceforge.net/p/gnuarmeclipse/bugs/159/
可以通过设置编译选项来选择软浮点,还是硬浮点。
http://blog.csdn.net/gujintong1110/article/details/23038217
将Hello_RTOS拷贝一份,到Qemu_with_M4
修改Makefile中的MCFLAGS,改为:
MCFLAGS=-mcpu=cortex-m4 -mthumb -mlittle-endian -mfpu=fpv4-sp-d16 -mfloat-abi=softfp -mthumb-interwork
DEFS=-DUSE_STDPERIPH_DRIVER -DSTM32F4XX
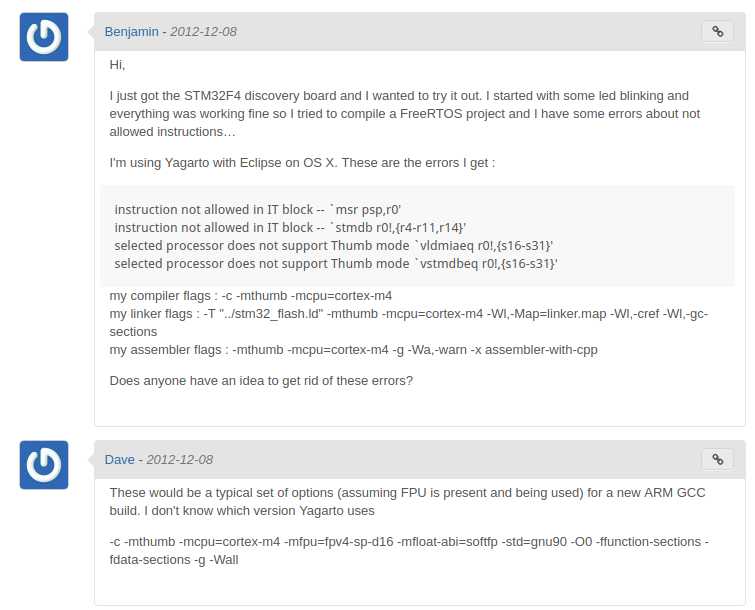
再次编译后,仍然出现错误:
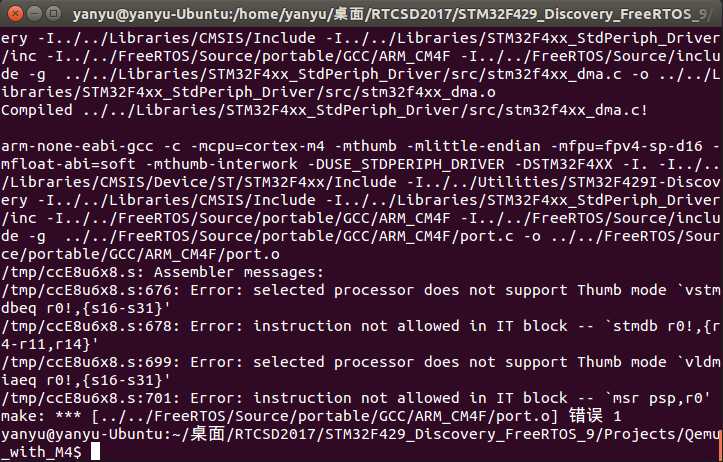
查询后发现,这些代码不支持软浮点。
https://sourceforge.net/p/freertos/discussion/382005/thread/9abf4160/
直接查看STM32F429_Discovery_FreeRTOS_9/FreeRTOS/Source/portable/GCC/ARM_CM4F/port.c发现:
#ifndef __VFP_FP__ #error This port can only be used when the project options are configured to enable hardware floating point support. #endif
代码的确不支持软浮点。
所以需要修改代码!
阅读代码后发现三处涉及硬浮点的代码:
1 /* This is a naked function. */ 2 static void vPortEnableVFP( void ) 3 { 4 __asm volatile 5 ( 6 " ldr.w r0, =0xE000ED88 \n" /* The FPU enable bits are in the CPACR. */ 7 " ldr r1, [r0] \n" 8 " \n" 9 " orr r1, r1, #( 0xf << 20 ) \n" /* Enable CP10 and CP11 coprocessors, then save back. */ 10 " str r1, [r0] \n" 11 " bx r14 " 12 ); 13 } 14 /*-----------------------------------------------------------*/
第9行就是硬浮点时,仿真出错的位置
实际上是任务在初始化时对浮点处理器的初始化
1 void xPortPendSVHandler( void ) 2 { 3 /* This is a naked function. */ 4 5 __asm volatile 6 ( 7 " mrs r0, psp \n" 8 " isb \n" 9 " \n" 10 " ldr r3, pxCurrentTCBConst \n" /* Get the location of the current TCB. */ 11 " ldr r2, [r3] \n" 12 " \n" 13 " tst r14, #0x10 \n" /* Is the task using the FPU context? If so, push high vfp registers. */ 14 " it eq \n" 15 " vstmdbeq r0!, {s16-s31} \n" 16 " \n" 17 " stmdb r0!, {r4-r11, r14} \n" /* Save the core registers. */ 18 " \n" 19 " str r0, [r2] \n" /* Save the new top of stack into the first member of the TCB. */ 20 " \n" 21 " stmdb sp!, {r3} \n" 22 " mov r0, %0 \n" 23 " msr basepri, r0 \n" 24 " dsb \n" 25 " isb \n" 26 " bl vTaskSwitchContext \n" 27 " mov r0, #0 \n" 28 " msr basepri, r0 \n" 29 " ldmia sp!, {r3} \n" 30 " \n" 31 " ldr r1, [r3] \n" /* The first item in pxCurrentTCB is the task top of stack. */ 32 " ldr r0, [r1] \n" 33 " \n" 34 " ldmia r0!, {r4-r11, r14} \n" /* Pop the core registers. */ 35 " \n" 36 " tst r14, #0x10 \n" /* Is the task using the FPU context? If so, pop the high vfp registers too. */ 37 " it eq \n" 38 " vldmiaeq r0!, {s16-s31} \n" 39 " \n" 40 " msr psp, r0 \n" 41 " isb \n" 42 " \n" 43 #ifdef WORKAROUND_PMU_CM001 /* XMC4000 specific errata workaround. */ 44 #if WORKAROUND_PMU_CM001 == 1 45 " push { r14 } \n" 46 " pop { pc } \n" 47 #endif 48 #endif 49 " \n" 50 " bx r14 \n" 51 " \n" 52 " .align 4 \n" 53 "pxCurrentTCBConst: .word pxCurrentTCB \n" 54 ::"i"(configMAX_SYSCALL_INTERRUPT_PRIORITY) 55 ); 56 }
第15,38行就是软浮点时编译出错的位置
实际上是切换任务时的保存、恢复现场
1 BaseType_t xPortStartScheduler( void ) 2 { 3 /* configMAX_SYSCALL_INTERRUPT_PRIORITY must not be set to 0. 4 See http://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html */ 5 configASSERT( configMAX_SYSCALL_INTERRUPT_PRIORITY ); 6 7 /* This port can be used on all revisions of the Cortex-M7 core other than 8 the r0p1 parts. r0p1 parts should use the port from the 9 /source/portable/GCC/ARM_CM7/r0p1 directory. */ 10 configASSERT( portCPUID != portCORTEX_M7_r0p1_ID ); 11 configASSERT( portCPUID != portCORTEX_M7_r0p0_ID ); 12 13 #if( configASSERT_DEFINED == 1 ) 14 { 15 volatile uint32_t ulOriginalPriority; 16 volatile uint8_t * const pucFirstUserPriorityRegister = ( volatile uint8_t * const ) ( portNVIC_IP_REGISTERS_OFFSET_16 + portFIRST_USER_INTERRUPT_NUMBER ); 17 volatile uint8_t ucMaxPriorityValue; 18 19 /* Determine the maximum priority from which ISR safe FreeRTOS API 20 functions can be called. ISR safe functions are those that end in 21 "FromISR". FreeRTOS maintains separate thread and ISR API functions to 22 ensure interrupt entry is as fast and simple as possible. 23 24 Save the interrupt priority value that is about to be clobbered. */ 25 ulOriginalPriority = *pucFirstUserPriorityRegister; 26 27 /* Determine the number of priority bits available. First write to all 28 possible bits. */ 29 *pucFirstUserPriorityRegister = portMAX_8_BIT_VALUE; 30 31 /* Read the value back to see how many bits stuck. */ 32 ucMaxPriorityValue = *pucFirstUserPriorityRegister; 33 34 /* Use the same mask on the maximum system call priority. */ 35 ucMaxSysCallPriority = configMAX_SYSCALL_INTERRUPT_PRIORITY & ucMaxPriorityValue; 36 37 /* Calculate the maximum acceptable priority group value for the number 38 of bits read back. */ 39 ulMaxPRIGROUPValue = portMAX_PRIGROUP_BITS; 40 while( ( ucMaxPriorityValue & portTOP_BIT_OF_BYTE ) == portTOP_BIT_OF_BYTE ) 41 { 42 ulMaxPRIGROUPValue--; 43 ucMaxPriorityValue <<= ( uint8_t ) 0x01; 44 } 45 46 /* Shift the priority group value back to its position within the AIRCR 47 register. */ 48 ulMaxPRIGROUPValue <<= portPRIGROUP_SHIFT; 49 ulMaxPRIGROUPValue &= portPRIORITY_GROUP_MASK; 50 51 /* Restore the clobbered interrupt priority register to its original 52 value. */ 53 *pucFirstUserPriorityRegister = ulOriginalPriority; 54 } 55 #endif /* conifgASSERT_DEFINED */ 56 57 /* Make PendSV and SysTick the lowest priority interrupts. */ 58 portNVIC_SYSPRI2_REG |= portNVIC_PENDSV_PRI; 59 portNVIC_SYSPRI2_REG |= portNVIC_SYSTICK_PRI; 60 61 /* Start the timer that generates the tick ISR. Interrupts are disabled 62 here already. */ 63 vPortSetupTimerInterrupt(); 64 65 /* Initialise the critical nesting count ready for the first task. */ 66 uxCriticalNesting = 0; 67 68 /* Ensure the VFP is enabled - it should be anyway. */ 69 vPortEnableVFP(); 70 71 /* Lazy save always. */ 72 *( portFPCCR ) |= portASPEN_AND_LSPEN_BITS; 73 74 /* Start the first task. */ 75 prvPortStartFirstTask(); 76 77 /* Should never get here as the tasks will now be executing! Call the task 78 exit error function to prevent compiler warnings about a static function 79 not being called in the case that the application writer overrides this 80 functionality by defining configTASK_RETURN_ADDRESS. */ 81 prvTaskExitError(); 82 83 /* Should not get here! */ 84 return 0; 85 }
第69行实际上是第1段代码的入口,第72行有关于FP的置位操作。
先将ARM_CM4F拷贝一份,到ARM_CM4_Soft
将上述三个地方注释掉,效果如下:
(实际上是两个地方,第一段代码,仅有这一个地方调用)
1 void xPortPendSVHandler( void ) 2 { 3 /* This is a naked function. */ 4 5 __asm volatile 6 ( 7 " mrs r0, psp \n" 8 " isb \n" 9 " \n" 10 " ldr r3, pxCurrentTCBConst \n" /* Get the location of the current TCB. */ 11 " ldr r2, [r3] \n" 12 " \n" 13 //" tst r14, #0x10 \n" /* Is the task using the FPU context? If so, push high vfp registers. */ 14 //" it eq \n" 15 //" vstmdbeq r0!, {s16-s31} \n" 16 " \n" 17 " stmdb r0!, {r4-r11, r14} \n" /* Save the core registers. */ 18 " \n" 19 " str r0, [r2] \n" /* Save the new top of stack into the first member of the TCB. */ 20 " \n" 21 " stmdb sp!, {r3} \n" 22 " mov r0, %0 \n" 23 " msr basepri, r0 \n" 24 " dsb \n" 25 " isb \n" 26 " bl vTaskSwitchContext \n" 27 " mov r0, #0 \n" 28 " msr basepri, r0 \n" 29 " ldmia sp!, {r3} \n" 30 " \n" 31 " ldr r1, [r3] \n" /* The first item in pxCurrentTCB is the task top of stack. */ 32 " ldr r0, [r1] \n" 33 " \n" 34 " ldmia r0!, {r4-r11, r14} \n" /* Pop the core registers. */ 35 " \n" 36 //" tst r14, #0x10 \n" /* Is the task using the FPU context? If so, pop the high vfp registers too. */ 37 //" it eq \n" 38 //" vldmiaeq r0!, {s16-s31} \n" 39 " \n" 40 " msr psp, r0 \n" 41 " isb \n" 42 " \n" 43 #ifdef WORKAROUND_PMU_CM001 /* XMC4000 specific errata workaround. */ 44 #if WORKAROUND_PMU_CM001 == 1 45 " push { r14 } \n" 46 " pop { pc } \n" 47 #endif 48 #endif 49 " \n" 50 " bx r14 \n" 51 " \n" 52 " .align 4 \n" 53 "pxCurrentTCBConst: .word pxCurrentTCB \n" 54 ::"i"(configMAX_SYSCALL_INTERRUPT_PRIORITY) 55 ); 56 }
1 BaseType_t xPortStartScheduler( void ) 2 { 3 /* configMAX_SYSCALL_INTERRUPT_PRIORITY must not be set to 0. 4 See http://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html */ 5 configASSERT( configMAX_SYSCALL_INTERRUPT_PRIORITY ); 6 7 /* This port can be used on all revisions of the Cortex-M7 core other than 8 the r0p1 parts. r0p1 parts should use the port from the 9 /source/portable/GCC/ARM_CM7/r0p1 directory. */ 10 configASSERT( portCPUID != portCORTEX_M7_r0p1_ID ); 11 configASSERT( portCPUID != portCORTEX_M7_r0p0_ID ); 12 13 #if( configASSERT_DEFINED == 1 ) 14 { 15 volatile uint32_t ulOriginalPriority; 16 volatile uint8_t * const pucFirstUserPriorityRegister = ( volatile uint8_t * const ) ( portNVIC_IP_REGISTERS_OFFSET_16 + portFIRST_USER_INTERRUPT_NUMBER ); 17 volatile uint8_t ucMaxPriorityValue; 18 19 /* Determine the maximum priority from which ISR safe FreeRTOS API 20 functions can be called. ISR safe functions are those that end in 21 "FromISR". FreeRTOS maintains separate thread and ISR API functions to 22 ensure interrupt entry is as fast and simple as possible. 23 24 Save the interrupt priority value that is about to be clobbered. */ 25 ulOriginalPriority = *pucFirstUserPriorityRegister; 26 27 /* Determine the number of priority bits available. First write to all 28 possible bits. */ 29 *pucFirstUserPriorityRegister = portMAX_8_BIT_VALUE; 30 31 /* Read the value back to see how many bits stuck. */ 32 ucMaxPriorityValue = *pucFirstUserPriorityRegister; 33 34 /* Use the same mask on the maximum system call priority. */ 35 ucMaxSysCallPriority = configMAX_SYSCALL_INTERRUPT_PRIORITY & ucMaxPriorityValue; 36 37 /* Calculate the maximum acceptable priority group value for the number 38 of bits read back. */ 39 ulMaxPRIGROUPValue = portMAX_PRIGROUP_BITS; 40 while( ( ucMaxPriorityValue & portTOP_BIT_OF_BYTE ) == portTOP_BIT_OF_BYTE ) 41 { 42 ulMaxPRIGROUPValue--; 43 ucMaxPriorityValue <<= ( uint8_t ) 0x01; 44 } 45 46 /* Shift the priority group value back to its position within the AIRCR 47 register. */ 48 ulMaxPRIGROUPValue <<= portPRIGROUP_SHIFT; 49 ulMaxPRIGROUPValue &= portPRIORITY_GROUP_MASK; 50 51 /* Restore the clobbered interrupt priority register to its original 52 value. */ 53 *pucFirstUserPriorityRegister = ulOriginalPriority; 54 } 55 #endif /* conifgASSERT_DEFINED */ 56 57 /* Make PendSV and SysTick the lowest priority interrupts. */ 58 portNVIC_SYSPRI2_REG |= portNVIC_PENDSV_PRI; 59 portNVIC_SYSPRI2_REG |= portNVIC_SYSTICK_PRI; 60 61 /* Start the timer that generates the tick ISR. Interrupts are disabled 62 here already. */ 63 vPortSetupTimerInterrupt(); 64 65 /* Initialise the critical nesting count ready for the first task. */ 66 uxCriticalNesting = 0; 67 68 /* Ensure the VFP is enabled - it should be anyway. */ 69 //vPortEnableVFP(); 70 71 /* Lazy save always. */ 72 //*( portFPCCR ) |= portASPEN_AND_LSPEN_BITS; 73 74 /* Start the first task. */ 75 prvPortStartFirstTask(); 76 77 /* Should never get here as the tasks will now be executing! Call the task 78 exit error function to prevent compiler warnings about a static function 79 not being called in the case that the application writer overrides this 80 functionality by defining configTASK_RETURN_ADDRESS. */ 81 prvTaskExitError(); 82 83 /* Should not get here! */ 84 return 0; 85 }
修改Makefile:
# Build Parameters: MCU Flags, Definitions, Includes, # Compile Flags, Linker Script, Linker Flags MCFLAGS=-mcpu=cortex-m4 -mthumb -mlittle-endian -mfpu=fpv4-sp-d16 -mfloat-abi=softfp -mthumb-interwork DEFS=-DUSE_STDPERIPH_DRIVER -DSTM32F4XX INCLUDES=-I. -I../../Libraries/CMSIS/Device/ST/STM32F4xx/Include -I../../Utilities/STM32F429I-Discovery -I../../Libraries/CMSIS/Include -I../../Libraries/STM32F4xx_StdPeriph_Driver/inc -I../../FreeRTOS/Source/portable/GCC/ARM_CM4_Soft -I../../FreeRTOS/Source/include CFLAGS=-c $(MCFLAGS) $(DEFS) $(INCLUDES) LDSCRIPT = ./stm32_flash.ld LDFLAGS=-T $(LDSCRIPT) --specs=nosys.specs $(MCFLAGS) # Inputs: C Sources, Assembler Sources SOURCES=main.c stm32f4xx_it.c system_stm32f4xx.c ../../Utilities/STM32F429I-Discovery/stm32f429i_discovery.c ../../Libraries/STM32F4xx_StdPeriph_Driver/src/stm32f4xx_syscfg.c ../../Libraries/STM32F4xx_StdPeriph_Driver/src/misc.c ../../Libraries/STM32F4xx_StdPeriph_Driver/src/stm32f4xx_gpio.c ../../Libraries/STM32F4xx_StdPeriph_Driver/src/stm32f4xx_rcc.c ../../Libraries/STM32F4xx_StdPeriph_Driver/src/stm32f4xx_exti.c ../../Libraries/STM32F4xx_StdPeriph_Driver/src/stm32f4xx_i2c.c ../../Libraries/STM32F4xx_StdPeriph_Driver/src/stm32f4xx_dma.c ../../FreeRTOS/Source/portable/GCC/ARM_CM4_Soft/port.c ../../FreeRTOS/Source/portable/MemMang/heap_2.c ../../FreeRTOS/Source/croutine.c ../../FreeRTOS/Source/event_groups.c ../../FreeRTOS/Source/list.c ../../FreeRTOS/Source/queue.c ../../FreeRTOS/Source/tasks.c ../../FreeRTOS/Source/timers.c ASMSOURCES=../../Libraries/CMSIS/Device/ST/STM32F4xx/Source/Templates/gcc_ride7/startup_stm32f429_439xx.s
再次编译后,没有异常信息
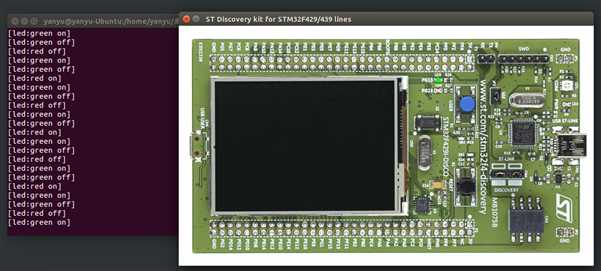
成功运行
最后,测试浮点运算能力
加入浮点运算后,利用远程调试,直接看到运算结果:
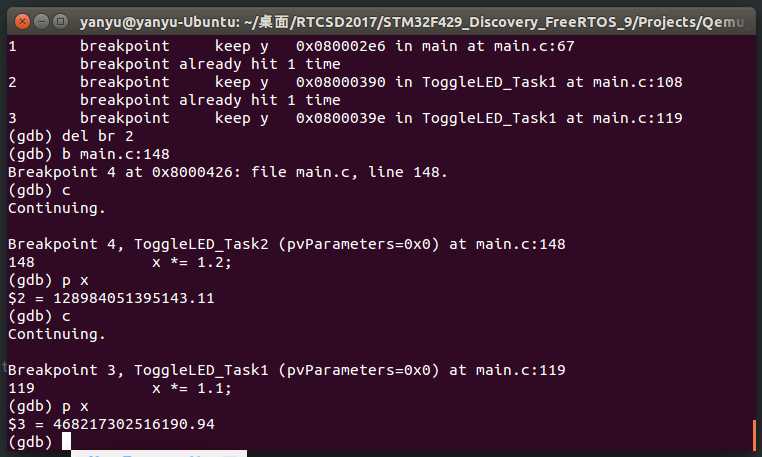
(运行时间比较久,乘的次数比较多,所以看起来像乱码,)
(实际上,log(468217302516190.94/2.7)/log(1.1) = 344,log(128984051395143.11/3.1)/log(1.2) = 172)
中间还遇到一个小问题,由于BSRR寄存器写入到LED变化有一点点延迟,但是在硬件中几乎不能感觉出来,
但是在仿真的时候这一点点延迟被放大,无法出现LED一闪一闪的效果。
将通过BSRR寄存器修改LED状态,改成直接操作ODR寄存器,便可以解决问题。
至此,在qemu上仿真STM32F429时出现的问题基本解决,欢迎大家评论留言。
log(128984051395143.11/3.1)/log(1.2)标签:discus 放大 project href queue original tin 解决 没有
原文地址:http://www.cnblogs.com/89yanyu/p/7537902.html