标签:display 对象 范围 其他 rom time gps mil 2-2
Lesson 1: Localization (using Histogram Filters)
Lesson 2: Kalman Filters
Lesson 3: Particle Filters
Lesson 4: Search
Lesson 5: PID Control
Lesson 6: SLAM (Simultaneous Localization And Mapping)
Lesson 1: Localization (using Histogram Filters)
定位指的是在传感器和移动之间来回的迭代,这使得我们能够保持跟踪目标对象的位置、方向和速度。
我们将写一个程序来实施定位,与GPS相比,我们的程序将极大的降低误差范围。
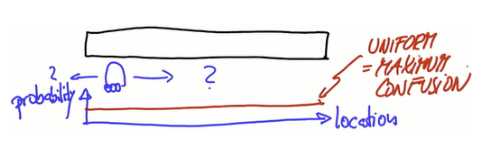
假设一个汽车或者机器人所处在一个一维世界,它在没有得到任何提示在哪一位置。通过一个函数对这个问题建模,纵轴表概率,横轴表这个一维世界里所有位置,利用一个当值函数给这个一维世界每一个地方分配相同权重。
为了定位必须引入其他特征,假设有三个看起来相似的门,可以从非门区域区分一扇门,(brlief = 信度),机器人感受到了它在一扇门的旁边,它分配这些地点更大的概率。门的度量改变了信度函数,得到新函数像这样,三个临近门的位置信度递加,其他所有地方信度递减,posterior bilief 表示它是在机器人进行感测测量后定义的。
标签:display 对象 范围 其他 rom time gps mil 2-2
原文地址:http://www.cnblogs.com/Lindaman/p/7570642.html