标签:配置环境 text image 程序 使用 .com 属性表 linu 复制
速腾聚创Robosense感知算法SDK1.0.0.beta版 for Windows
开发环境:
1、64位win10+vs2013编译产生,
2、基于pcl1.8
3、OpenCV 2.4.9
请配合64位程序使用,使用接口说明同Linux版。

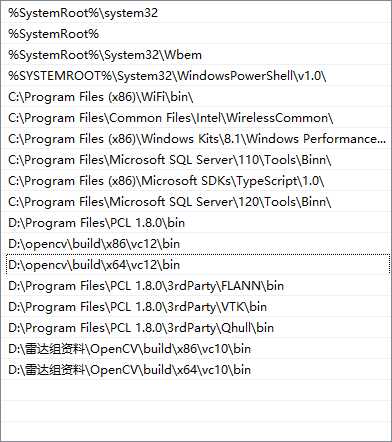
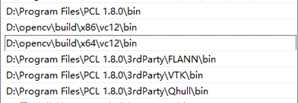
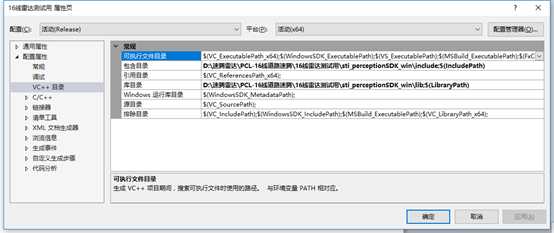
安装上面的软件到D盘,并配置环境变量。

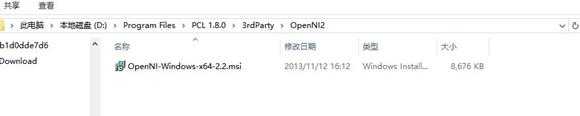
安装此文件到D/programfile
注意点:


复制下载的链接,然后用迅雷打开,迅雷会自动识别到这个链接地址。
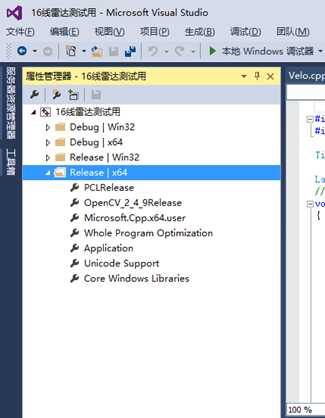
注意:刚开始的时候加载.sln文件没有成功,主要是属性表丢失的原因造成的,我们只需要将属性页当中的错误给去掉就行了。


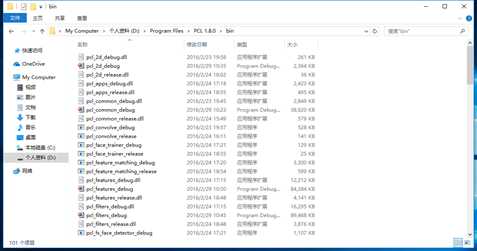
选择中间的一个OpenNI2.dll 拷贝到程序当中即可。
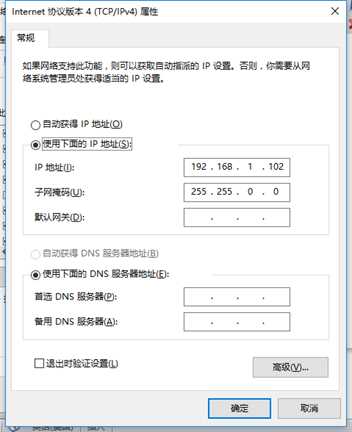
虚拟总线不支持虚拟网卡,虚拟网卡也需要禁用。
标签:配置环境 text image 程序 使用 .com 属性表 linu 复制
原文地址:http://www.cnblogs.com/zhuxuekui/p/7629360.html