标签:高斯 输入 高斯函数 lte nbsp images 结果 一个 多个
卡尔曼滤波和蒙特卡洛定位方法主要区别:
卡尔曼滤波器的输入数据来源于(激光)测距仪,以检测其他车辆包括自行车和行人在多个时刻的位置,预测未来的位置和速度。
卡尔曼滤波的分布以高斯函数给出,它是连续函数,下方面积加起来等于1,特征在于两个参数 平均值μ和称为方差宽度σ 2,在一维参数空间中的任何高斯均以(μ,σ2)表示。
我们的任务是保持一个对未知物体位置最佳估计的μ和σ2。高斯函数完整表达式:
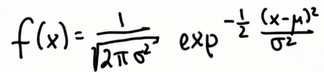 (lg)
(lg)
编程返回(10,4,8)参数的高斯函数值,并且想办法
标签:高斯 输入 高斯函数 lte nbsp images 结果 一个 多个
原文地址:http://www.cnblogs.com/Lindaman/p/7629784.html