标签:表示 http 使用 图表 调整 规律 性能分析 箭头 信号
1:反馈控制原理
(1) 反馈:通常,把取出输出量送回到输入端,并与输入信号相比较产生偏差信号的过程,称为反馈。
(2) 负反馈,正反馈:若反馈的信号与输入信号相减,使产生的偏差越来越小,则称为负反馈。反之则称为正反馈。
(3) 反馈控制就是采用负反馈并利用偏差进行控制的过程,而且,由于引入了被控量的反馈信息,整个控制过程称为闭合过程,因此反馈控制也成为闭环控制。
(4)测量元件,比较元件和执行元件统称为控制装置。
2:反馈控制的基本组成
(1)将组成系统按职能分类主要有以下几种:
测量元件,给定元件,比较元件,放大元件,执行元件,校正元件。
(2)一个典型的反馈控制系统基本组成可用下图表示:
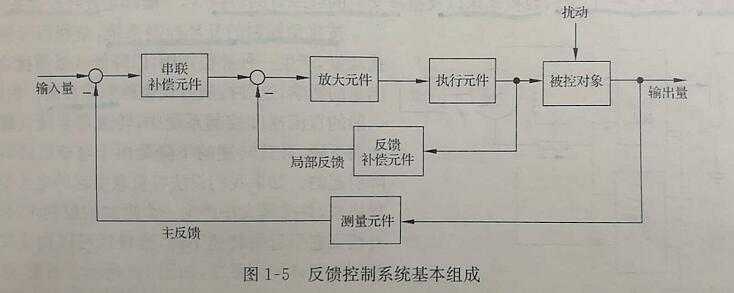
“O”代表比较元件,它将测量元件检测到的被控量与输入量进行比较。“—”表示两者符号相反,即负反馈。信号从输入端沿箭头方向到达输出端的传输通路称前向通路。系统输出量经测量元件反馈到输入端的传输通路称为主反馈通路。前向通路与主反馈通路共同构成主回路。此外,还有局部反馈通路以及由它构成的内回路。只包含一个主反馈通路的系统成为单回路系统。有两个或两个以上反馈通路的系统成为多回路系统。
3:自动控制的基本控制方式
(1)反馈控制方式(闭环控制方式)
反馈控制方式组成的反馈控制系统,具有抑制任何内外扰动对被控量产生影响的能力,有较高的控制精度。但是这种系统使用的元件多,结构复杂,特别是系统的性能分析和设计也比较麻烦。
(2)开环控制方式
开环控制方式是指控制装置与被控对象之间只有顺向作用而没有反向联系的控制过程。开环控制方式没有自动修正偏差的能力,抗扰动性差。但是结构简单,调整方便,成本低,在精度要求不高或扰动影响较小的情况下有一定的实用价值。
(3)复合控制方式
按扰动控制方式在技术上较按偏差控制方式简单,但它只适用于扰动是可测量的场合,而且一种补偿装置只能补偿一种扰动因素,对其余扰动均不起补偿作用。因此,比较合理的一种控制方式把按偏差控制与按扰动控制结合起来,对于主要扰动采用适合的补偿装置实现按扰动控制,同时,再组成反馈控制系统实现按偏差控制,以消除其余扰动产生的偏差。这样,系统的主要扰动已被补偿,反馈控制系统就比较容易设计,控制效果也会更好。这种按偏差控制和按扰动控制相结合的控制方式称为复合控制方式。
4:自动控制系统的分类
自动控制系统有多种分类方法。例如,按控制方式可分为开环控制、反馈控制、复合控制等;按系统性能可分为线性系统和非线性系统、连续系统和离散系统、定常系统和时变系统、确定性系统和不确定性系统等;按输入量变化规律又可分为恒值控制系统、随动系统和程序控制系统等。
(1)线性连续控制系统
分为:
恒值控制系统:输入量是常值,被控量是常值
随动系统:输入量是预先未知的随时间任意变化的函数,要求被控量以尽可能小的误差跟随输入量的变化,故又称跟随系统。
程序控制系统:输入量是按预定规律随时间变化的函数,要求被控量迅速、准确地加以复现。
(2)线性定常离散控制系统
(3)非线性控制系统
5:对自动控制系统的基本要求
(1)稳定性
稳定性是保证控制系统正常工作的先决条件。一个稳定的控制系统,其被控量偏离期望值的初始偏差应随时间的增长逐渐减小并趋于零。具体来说,对于稳定的恒值控制系统,被控量因扰动而偏离期望值后,经过一个过渡过程时间,被控量应恢复到原来的期望值状态;对于稳定的随动系统,被控量应能始终跟踪输入量的变化。反之,不稳定的控制系统,其被控量偏离期望值的初始偏差将随时间的增长而发散,因此,不稳定的控制系统无法实现预定的控制任务。
线性自动控制系统的稳定性是由系统结构和参数决定的,与外界因素无关,这是因为控制系统中一般含有储能元件和惯性元件,当系统受到扰动或有输入量时,控制过程不会立即完成,而是有一定的延缓,这就使得被控量恢复期望值或跟踪输入量有一个时间过程,称为过渡过程。
(2)快速性
为了很好的完成控制任务,控制系统仅仅满足稳定性要求是不够的,还必须对其过渡过程的形式和快慢提出要求,一般称为动态性能。
(3)准确性
当过渡过程结束后,被控量达到的稳态值(即平衡状态)应与期望值一致。被控量的稳态值与期望值之间会有误差存在,称为稳态误差。稳态误差是衡量控制系统精度的重要标志。
标签:表示 http 使用 图表 调整 规律 性能分析 箭头 信号
原文地址:http://www.cnblogs.com/lovemi93/p/7634600.html