标签:像素 替换 sys ddl 否则 机械 不同的 版本 文档

教研室新进机器人,组内成员需要对其做一下必要的了解。手册纯英文内容多,这里挑重点介绍几条:
作为输入设备,Tiago对周围环境感知完全通过各种传感器实现。配备的传感器有以下几种:
1,激光测距仪:0.05-10m 15Hz
2,声呐:0.03-1m 40kHz
3,惯性测量传感器:MPU 6050
4,立体声麦克风
5,电机电流反馈传感器
6,扭矩传感器
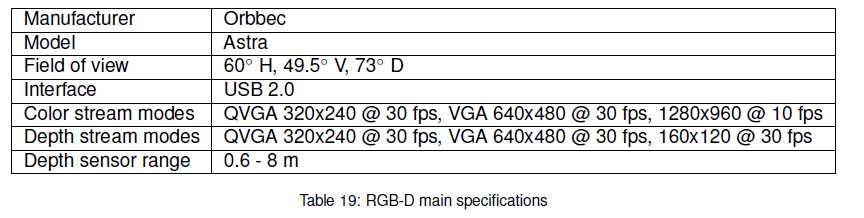
7,RGB-D 深度摄像机
TIAGo的移动基座配有差分驱动机构,包含板载计算机,电池,电源连接器,激光测距仪,三个后置声纳,用户面板,服务面板和两个WiFi网络,以确保无线连接。
此外,带有扩展坞的TIAGo版本在前面有一个充电板。
机械臂最大负重2kg,手指承重1kg(重点标注,超重损坏机器人!很难修的!)
躯干高度:110cm-145cm
最大移动速度:1m/s
TIAGo的头部配有俯仰电机,即2个DoF,并配有立体声麦克风,扬声器和RGB-D相机。 此外,在头部的顶部有一个带有安装点的平坦表面,以允许用户添加新的传感器或设备。
注意,添加新设备时,头部有效载荷为0.5 kg。 图18示出了俯仰机构的每个部件和两个接头的位置。
由于本实验室主要方向为计算机视觉,所以RGBD camera详细参数贴一下
使用Tiago提供的USB驱动安装,创建以下几个默认用户:
root 密码palroot
pal 密码pal
aptuser 密码palaptuser
TIAGo计算机的名称是tiago-0c,其中0需要由机器人的序列号替换。 为了清楚起见,以下我们将使用tiago-0c来指代TIAGo的计算机名称。
链接机器人的ssh
ssh pal@tiago-0c
默认用户同上。
TIAGo的计算机具有防止可能损坏文件系统的电源故障的保护。
为了使用文件系统作为读写,请执行以下操作:
root@tiago-0c:~# rw Remounting as rw... Mounting /ro as read-write Binding system files... root@tiago-0c:~# chroot /ro
rw命令将所有分区重新挂载为读写。 然后一个chroot到/ ro我们有与默认相同的系统,但所有可写。 所有执行的更改都将持续。为了回到以前的状态,请执行以下操作:
root@tiago-0c:~# exit root@tiago-0c:~# ro Remount /ro as read only Unbinding system files
第一个退出命令从chroot返回。 然后ro脚本以默认方式重新挂载分区。
控制计算机具有用于具有域名reem-lan的TIAGo的内部LAN的DNS服务器。 该DNS服务器由连接到LAN的所有计算机使用。
当将计算机添加到内部LAN(例如使用以太网连接器)时,可以使用命令addLocalDns将其添加到内部DNS。(备注,暂时用不到,不展开)
SDE开发计算机中使用的操作系统基于Linux Ubuntu 14.04 LTS发行版。 与此特定Linux发行版有关的任何文档适用于SDE。 本文仅指出了PAL SDE与Ubuntu 14.04的不同之处。
配置要求:
推荐使用具有8个CPU内核的计算机。 建议使用分辨率至少为1920x1080像素的强大显卡,以便在使用可视化工具(如rviz和Gazebo模拟器)时获得更好的用户体验。 开发计算机ISO提供对Nvidia卡的支持。
在升级开发计算机的内核的情况下,PAL机器人无法确保对其他显卡的正确支持。
在开发基于ROS的机器人应用程序时,通常将机器人的计算机上运行的rosmater和运行ROS节点的开发计算机连接到机器人的rosmaster。 这是通过在运行ROS节点的开发计算机的每个终端设置以下环境变量来实现的:
export ROS_MASTER_URI=http://tiago-0c:11311
请注意,为了在不同的计算机之间成功交换ROS消息,他们中的每一个都需要能够解析其他计算机的主机名。 这意味着机器人计算机需要能够解析任何开发计算机的主机名,反之亦然。
否则,ROS消息将无法正确交换,并会发生意外行为。在开始使用运行指向机器人的rosmaster的ROS节点的开发计算机之前,请执行以下检查:
ping tiago-0c
确保ping命令到达机器人的计算机。 然后从机器人做同样的事情:
ssh pal@tiago-0c
ping devel_computer_hostname
如果ping未到达开发计算机,则继续将主机名添加到机器人的本地DNS。 否则,您可以导出环境变量ROS_IP - 从机器人可见的开发计算机的IP。
例如,如果将机器人设置为接入点,并且开发计算机连接到它,并且已经给出了IP 10.68.0.128(使用ifconfig来计算出),则在用于与机器人通信的所有终端中使用以下命令:
export ROS_MASTER_URI=http://tiago-0c:11311
export ROS_IP=10.68.0.128
所发送的所有ROS命令将使用计算机的IP而不是主机名。
可以看出,有两个主要的软件块:操作系统是Ubuntu,具有实时内核补丁Xenomai,以及基于Orocos的机器人中间件,用于实时,安全的进程间通信。
标签:像素 替换 sys ddl 否则 机械 不同的 版本 文档
原文地址:http://www.cnblogs.com/xueyudlut/p/7635509.html