标签:log .com images 文件 叉积 2.x bit fabs 凸包
1、首先,凸包是啥:
若是在二维平面上,则一般的,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边型,它能包含点集中所有的点。
───────────────────────────────────────────────────────────────────────────────────────────────────────────
2、那么,如何通过某种算法求二维平面上的凸包呢?
有Graham扫描法(Graham scan algorithm),复杂度O(nlogn)。
话不多说,先上当年大佬的论文……
呃,可以看到,这个标题是非常的酷嗷,对于有限平面点集的凸包计算的高效算法,划重点。
给一个平面点集S,标号为s1~sn,据说我们经常对找它的凸包感兴趣(真的吗……我怎么从来没感兴趣过……)
然后graham教授就给了我们一种炫酷的五步法,来求凸包。

第一步:
目标是找个在凸包内部的点P。
我们对集合S三个点三个点进行检测,检测它们是否共线:
若共线,扔掉中点;
若不共线,就选这三个点所组成的三角形的质心作为点P。
第二步:
以P为原点,任意一个方向为θ=0轴,建立一个极坐标系;
对集合S中的每个点si,都按这个坐标系表示一下它们的坐标。
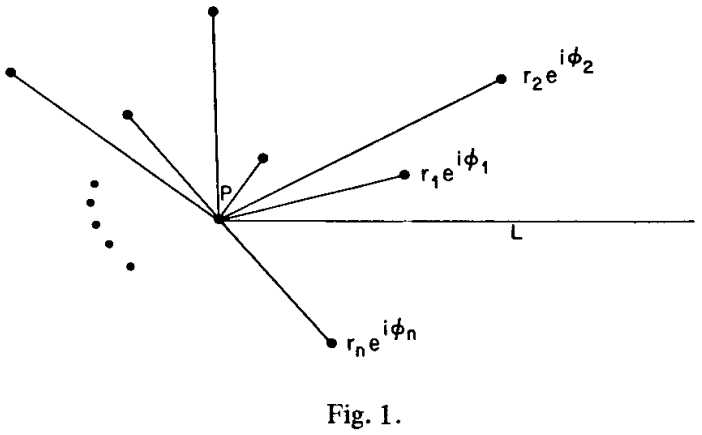
第三步:
现在每个点都有坐标 r i ∠ θ i ,我们对这些点,按照θ的升序进行排序。
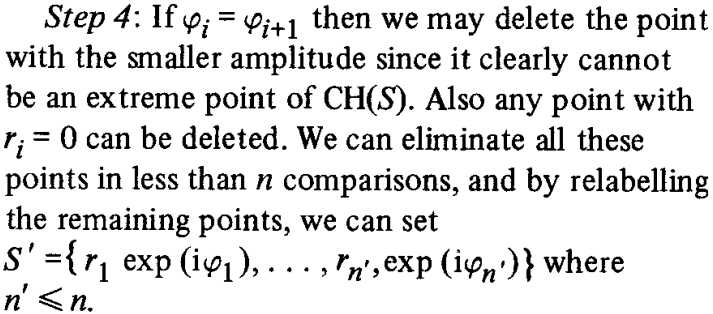
第四步:
如果有某两个点的角度相等,就删掉r较小的那个点,因为它显然不可能是凸包边界上的点。
另外呢,所有r=0的,也可以删了,反正也impossible。
then,重新给还存在着的点编号,新的集合记为S‘。
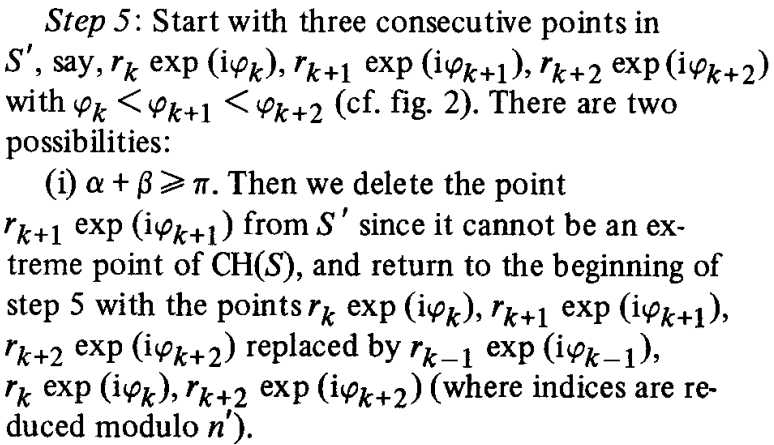
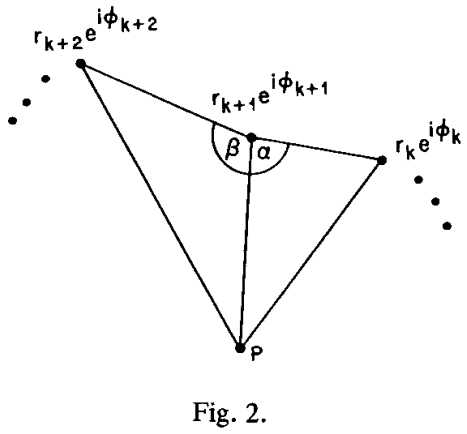
第五步:
对于S‘中连续的三个点k,k+1,k+2,如图2,有两种可能:
1)α + β ≥ π,看图,就很容易知道,这个点k+1,显然不可能是凸包边界上的点了;
回到步骤五,重新选择点k-1,k,k+2作为新的三个点;
2)α + β < π,就回到步骤五,选择点k+1,k+2,k+3作为新的三个点;
相当于往前进。
原文件:https://files.cnblogs.com/files/dilthey/graham%E6%89%AB%E6%8F%8F%E6%B3%95.pdf
───────────────────────────────────────────────────────────────────────────────────────────────────────────
3、那么放到程序中,具体如何实现呢?
我们保留“对于三个点,判断角α、β和是否小于180度,并且进行相应的前进退后”的思想,不过对于选取原点的方法进行一定的修改。
①找到点集S中纵坐标最小的点(如果y坐标相同,则选其中横坐标最小的),作为原点P0。
②计算其他所有点的辐角,并且将他们按从小到大排序,如果遇到辐角相同的一些点,则按与原点距离从小到大排序,记为P1~Pn。
③建栈,入栈P0,P1,P2;
④选取一个点Pi(i初始值为3),前往步骤⑤;
⑥获得栈顶点和次栈顶点Pk,Pk-1,
进行判定:如果 Pk-1 -> Pk -> Pi 是右转的(其实就是α + β ≥ π),就弹出栈顶元素,并且返回步骤⑥;
如果是左转的(α + β < π),就入栈点Pi,并且i+=1,返回步骤④;
───────────────────────────────────────────────────────────────────────────────────────────────────────────
4、代码模板:
#include<bits/stdc++.h> #define MAX 10005 #define eps 1e-6 using namespace std; struct Point{ double x,y; Point(double tx=0,double ty=0):x(tx),y(ty){} }p[MAX]; typedef Point Vctor; Vctor operator - (Point A,Point B){return Vctor(A.x-B.x,A.y-B.y);} int dcmp(double x) { if(fabs(x)<eps) return 0; else return (x<0)?(-1):(1); } //叉积 double Cross(Vctor A,Vctor B){return A.x*B.y-A.y*B.x;} //距离 double dist(Point p1,Point p2){return sqrt((p1.x-p2.x)*(p1.x-p2.x)+(p1.y-p2.y)*(p1.y-p2.y));} bool cmp(Point p1,Point p2) { double tmp=Cross(p1-p[0],p2-p[0]); if(!dcmp(tmp)) return dist(p[0],p1)<dist(p[0],p2); else return tmp>0; } vector<Point> graham_scan(int n) { vector<Point> ans; int idx=0; for(int i=1;i<n;i++)//选出Y坐标最小的点,若Y坐标相等,选择X坐标小的点 { if(p[i].y<p[idx].y || (p[i].y == p[idx].y && p[i].x < p[idx].x)) idx=i; } swap(p[0],p[idx]); sort(p+1,p+n,cmp); for(int i=0;i<=2;i++) ans.push_back(p[i]); int top=2; for(int i=3;i<n;i++) { while(top>0 && Cross(p[i]-ans[top-1],ans[top]-ans[top-1]) >= 0) { ans.pop_back(); top--; } ans.push_back(p[i]); top++; } return ans; }
标签:log .com images 文件 叉积 2.x bit fabs 凸包
原文地址:http://www.cnblogs.com/dilthey/p/7763909.html