标签:尺寸 坐标 一起 com 学习 尺度 article image 坐标系
参考自:
http://blog.csdn.net/yangdashi888/article/details/51356385
http://blog.csdn.net/li_007/article/details/5976261
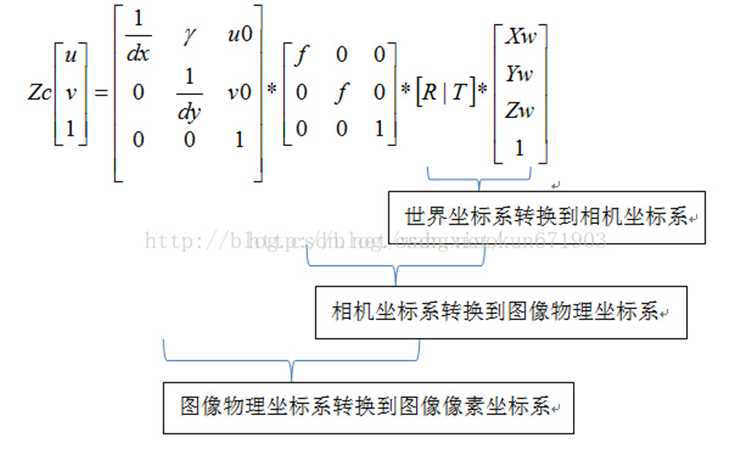
其中,Zc表示单目相机的尺度不确定性(单目相机无法确定尺度,所以ORB-SLAM等最后都对单目做了sim3优化)
等号右边第一、二个矩阵经常乘在一起作为相机内参,其中dx、dy是像面上每个像素点在x轴y轴上的尺寸,u0和v0用来把图像坐标原点从图像中心挪到左上角,f表示焦距。
[R|T]也叫相机外参,是相机相对于世界坐标系的旋转和平移,其中三维旋转矩阵R不能做加法(如果相机先转过角度R1,再转过角度R2,那么相机一共旋转过的角度是R1xR2)
标签:尺寸 坐标 一起 com 学习 尺度 article image 坐标系
原文地址:http://www.cnblogs.com/zhengmeisong/p/7811485.html