标签:pytho hub math ext idt k-means gif 随机梯度 随机梯度下降
摘要:
1.最小二乘法
2.梯度下降法
3.最大(对数)似然估计(MLE)
4.最大后验估计(MAP)
5.期望最大化算法(EM)
6.牛顿法
7.拟牛顿迭代(BFGS)
8.限制内存-拟牛顿迭代(L-BFGS)
9.深度学习中的梯度优化算法
10.各种最优化方法比较
拟牛顿法和牛顿法区别,哪个收敛快?
1.最小二乘法
注:这里假定你了解向量的求导公式,并且知道正态分布和中心极限定律(不知道的可以去数学知识索引翻翻)
(线性)最小二乘回归解法:
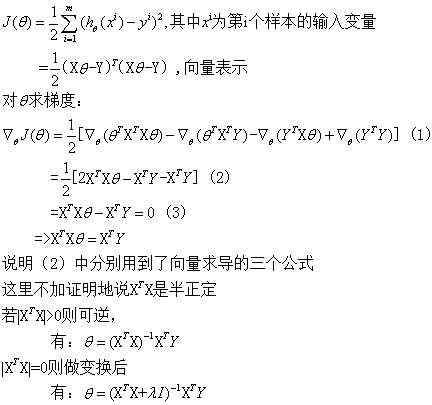
损失函数:平方损失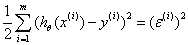 ,这里的误差可能是多种独立因素加和造成的,所以我们假定其符合均值为0的高斯分布,继而可以推出平方损失。参考Andrew Ng机器学习公开课笔记 -- 线性回归和梯度下降的Probabilistic interpretation,概率解释 部分
,这里的误差可能是多种独立因素加和造成的,所以我们假定其符合均值为0的高斯分布,继而可以推出平方损失。参考Andrew Ng机器学习公开课笔记 -- 线性回归和梯度下降的Probabilistic interpretation,概率解释 部分
适用场合:
优缺点:维数过高时,求逆效率过低
2.梯度下降法
这是一种迭代方法,先随意选取初始θ,然后不断的以梯度的方向修正θ,最终使J(θ)收敛到最小,当然梯度下降找到的最优是局部最优,也就是说选取不同的初值,可能会找到不同的局部最优点
常见的3终梯度下降算法:
1.批梯度下降(BGD)算法:

2.随机梯度下降(SGD)算法:

3.mini-batch随机梯度下降
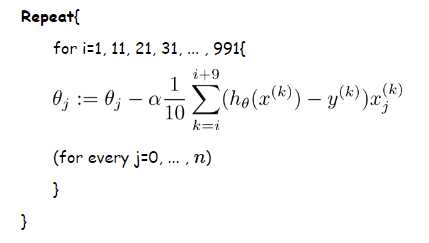
同样可以参照Andrew Ng机器学习公开课笔记 -- 线性回归和梯度下降的梯度下降(gradient descent)部分
3.最大(对数)似然估计(MLE)
参照:数理统计与参数估计杂记
4.最大后验估计(MAP)
引入了先验分布对参数做规范化,其参数估计是对贝叶斯后验概率求极值,而预测过程和最大似然估计一样
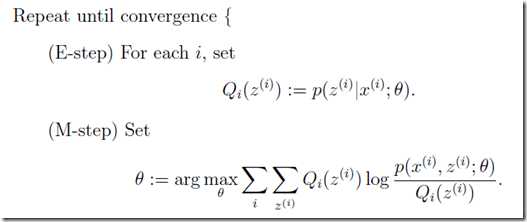
5.期望最大化算法(EM)
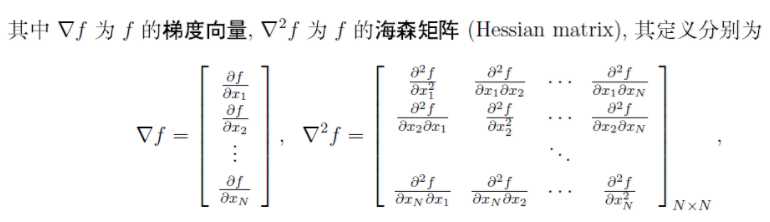
6.牛顿法:
在非线性优化问题上。牛顿法的基本思想是:在现有极小点估计值的附近对f(x)做二阶泰勒展开(如下图公式),进而找到极小点的下一个估计值,


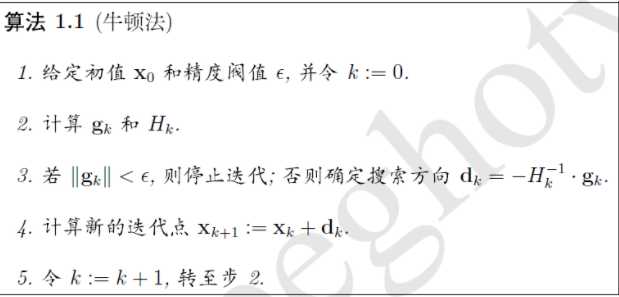
求驻点,并假设海森矩阵可逆,则得到如下迭代公式:

综合以上,得到牛顿发的算法流程如下:
7.拟牛顿迭代(BFGS)
同时利用梯度和二阶导数做优化,相当于在当前点处进行二阶的泰勒展开,并找到二次曲面的极小值点。
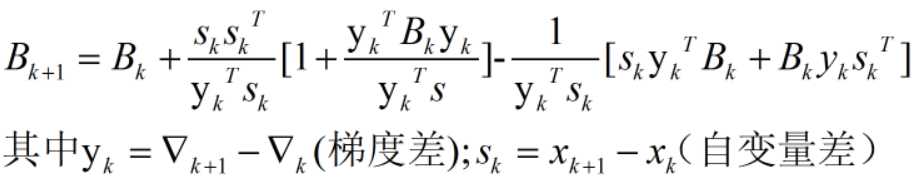
迭代公式为:
实际的优化问题中很难保证每一点的Hessian矩阵(二阶导数对应的矩阵)都正定(可逆),而拟牛顿法构造了一个不太精确,但是可以保证正定的矩阵
Hessian矩阵的逆的更新公式是:
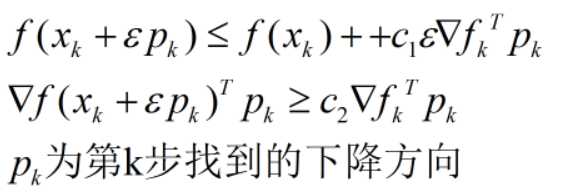
当学习速率满足Wolfe条件时,可以保证找到比现有函数更优的一个点;
Wolfe条件:
8.限制内存-拟牛顿迭代(L-BFGS)
它对BFGS算法进行了近似,其基本思想是:不在存储完整的矩阵D,而是存储计算过程中的向量s,y,需要矩阵D时,利用向量系列s,y的计算来代替。而且向量序列也不是所有的都存,
而是固定存最新的m个(参数m可由用户根据自己机器的内存自行指定)。每次计算D时,只利用最新的m个s,y.显然这样一来,我们将存储有原来的O(N*N)降到了O(mN)

9.深度学习中的梯度优化算法
算法介绍:梯度下降优化算法综述
Adam:
RMSprop:
为什么adagrad适合处理稀疏梯度?它能够对每个参数自适应不同的学习速率,对稀疏特征,得到大的学习更新,对非稀疏特征,得到较小的学习更新,因此该优化算法适合处理稀疏特征数据。
10.各种最优化方法比较
1.牛顿法和拟牛顿法区别,哪个收敛快?
牛顿法:若函数的二次性态较强,牛顿法的收敛速度是很快的。但是牛顿法由于迭代公式中没有步长因子,而是定长迭代,对于非二次型目标函数,有时牛顿法不能保证函数值稳定地下降,在严重的情况下甚至不能收敛;
拟牛顿法:使用"伪逆"矩阵代替海森矩阵,所以无需计算二阶偏导,而且可以保证矩阵正定。通过一维搜索确定步长。参考链接
2.SGD,AdaGrad,Adam的区别
SGD:使用负梯度更新权重
AdaDelta和AdaGrad:1.自适应,省去了人工设定学习率的过程;2.只用到一阶信息,计算开销小;3.超参数不敏感性,其公式中额外增加的参数的选择对求解结果没有很大影响;4.鲁棒性;5.按维度分开计算学习率;
Adam:对于AdaGrad的泛化,其加入了:自适应时刻估计变量mt, μt
标签:pytho hub math ext idt k-means gif 随机梯度 随机梯度下降
原文地址:http://www.cnblogs.com/arachis/p/tools.html