标签:span 空闲 bit net 实现 ota art void 摄像机
开始的唠叨
说是3D引擎确实有点过于博眼球了,其实就是实现了一个透视投影,当然也不是那么简单的。 此篇文章是纯粹给小白看的 高手请勿喷 。也称之为小向带你图形学入门基础 。 哇哈哈哈哈 一说到做一个3D画面的东东 一说总是到DirectX OpenGL 这些玩意儿 我们这些菜鸟总是 想到哇擦擦 哇C++的 哇 计算机图形学好难。这玩意儿难度好大。其实就那么回事儿 ,DirectX OpenGL 只是工具 而已, 只要把原理搞懂了 你看我用low逼的GDI照样给你绘制一个3D物体 可以这样说即使不用GDI 其他任何能划线 画点的东西 ,我在安卓平台上照样给你实现这个效果。不要局限于工具 谁说做3D就只能用DirectX OpenGL了 ,谁说做3D只能用C++了 。
顶点数据展现
首先是3D编程中通用的数据展现 那就是顶点组成的网格数据 称之为mesh, 3个点为一组 组成的三角面片数据。三个点顺时针的方向那么 箭头方向为外表面 另一面为内表面 ,在绘制的时候 内表面不可见。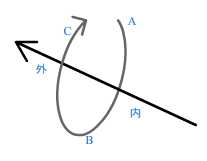
好那么我们也以此方式来定义数据 ,我们定义的东西是一个 中心位置在( 0,0,-130)处的立方体。我们的观察点在(0, 0, 0)处 正对着立方体观察。 由于我们想让立方体一个面的颜色相同,所以是两个为一组定义的 ,当然三角形也是以同样的 两个为一组 组成一个正方形面。由此对物体表面空间点的描述数据就做好了。
好 ,定义数据的代码:
1 public class Marsh 2 { 3 public List<Point3dF> points; 4 public Marsh() 5 { 6 points = new List<Point3dF>(); 7 8 //0 9 Point3dF pointA = new Point3dF(30, 30, -160); 10 //1 11 Point3dF pointB = new Point3dF(-30, 30, -160); 12 //2 13 Point3dF pointC = new Point3dF(-30, -30, -160); 14 //3 15 Point3dF pointD = new Point3dF(30, -30, -160); 16 //4 17 Point3dF pointE = new Point3dF(30, 30, -100); 18 //5 19 Point3dF pointF = new Point3dF(-30, 30, -100); 20 //6 21 Point3dF pointG = new Point3dF(-30, -30, -100); 22 //7 23 Point3dF pointH = new Point3dF(30, -30, -100); 24 25 points.Add(pointA); 26 points.Add(pointB); 27 points.Add(pointC); 28 points.Add(pointD); 29 30 points.Add(pointE); 31 points.Add(pointF); 32 points.Add(pointG); 33 points.Add(pointH); 34 35 36 37 path1 = new List<int>() { 38 4, 6,7, 39 4,5,6, 40 5 ,2 ,6, 41 5, 1, 2, 42 1 ,3 ,2, 43 1, 0 ,3, 44 0 ,7 ,3, 45 0 ,4, 7 46 , 47 4, 1, 5, 48 4 ,0 ,1, 49 6, 2 ,7, 50 2, 3, 7 51 }; 52 53 faceColors = new List<Brush>(); 54 Random rdm = new Random(); 55 56 for (int i = 0; i < 6; i++) 57 { 58 Brush b= new SolidBrush(Color.FromArgb(rdm.Next(0, 255), rdm.Next(0, 255), rdm.Next(0, 255))); 59 //Brush b = new SolidBrush(Color.FromArgb(266 / 6 * i, 266 / 6 * i, 266 / 6 * i)); 60 faceColors.Add(b); 61 faceColors.Add(b); 62 } 63 64 } 65 public List<Brush> faceColors; 66 public List<int> path1; 67 68 }
关于透视投影 和顶点绘制
我数学底子差 在写这个例子之前参考了很多前辈的 图形学理论基础。最主要是透视投影 和3D旋转矩阵绕任意轴旋转 。甚至没完全搞懂 于是我就抄起代码开搞了。 不得不说这玩意儿真的很有意思。
首先是透视投影:http://blog.csdn.net/popy007/article/details/1797121
作者讲的很详细 其实我只看到一半 ,后面矩阵推导那些太难了 没有继续往下啃 。视线是一个发散的方式从一个点出去 (其实最后发现不用管什么视椎体不视椎体的)。 假设视点前面有一张半透明的纸张 视线上的点是怎么打到纸张上的?关于这个问题 你要粗暴点确实很简单 就是三角形 初中的知识。 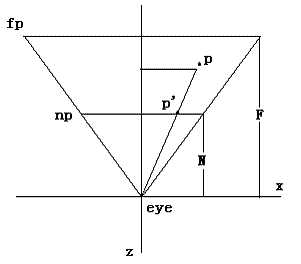
就如开始所述 视点在(0,0,0) 处看向 位于(0,0,-130) 的立方体 ,假设有一架摄像机 ,那么上图就是他的从空中看下去的俯视图。设p为(x,z) p‘为(x‘ ,z‘) 。则x‘=-N(x/z) y‘=-N(y/z)。为了方便 我们的数据定义也是跟示意图上差不多的。于是我们依葫芦画瓢 把所有的点绘制出来 包装成一个paint函数。
需要注意的是平面坐标系 跟屏幕坐标之间的转换 ,其实不难 你其他计算应用数学公式 数学函数 还是一样该咋算咋算。 完成后我们平面坐标系的0,0 对应屏幕坐标的0,0 。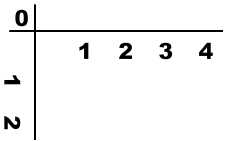
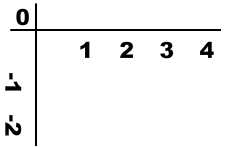
看到没 x轴0左边也是负数 不用管 就只是y的符号不一样 变成-y就可以了。然后要让他显示在窗口中间 还要进行偏移 就是x加偏移, y加偏移 就这样就完成啦 。 哈哈哈哈哈。
1 public void paint() 2 { 3 Graphics gph = Graphics.FromHwnd(this.Handle); 4 gph.Clear(Color.Lavender); 5 //进行到屏幕坐标的映射(x y z) 6 //p~ =(-n x/z -n y/z -n) 7 PointF screenLastPoint= PointF.Empty; 8 for (int i = 0; i < msh.path1.Count / 3; i++) 9 { 10 //if (i >= 4) 11 // return; 12 PointF screenPointA = new PointF((float)((-nearPlan) * (msh.points[msh.path1[i * 3]].x / msh.points[msh.path1[i * 3]].z)) , (float)((-nearPlan) * (msh.points[msh.path1[i * 3]].y / msh.points[msh.path1[i * 3]].z)) ); 13 PointF screenPointB = new PointF((float)((-nearPlan) * (msh.points[msh.path1[i * 3 + 1]].x / msh.points[msh.path1[i * 3 + 1]].z)) , (float)((-nearPlan) * (msh.points[msh.path1[i * 3 + 1]].y / msh.points[msh.path1[i * 3 + 1]].z)) ); 14 PointF screenPointC = new PointF((float)((-nearPlan) * (msh.points[msh.path1[i * 3 + 2]].x / msh.points[msh.path1[i * 3 + 2]].z)) , (float)((-nearPlan) * (msh.points[msh.path1[i * 3 + 2]].y / msh.points[msh.path1[i * 3 + 2]].z)) ); 15 16 screenPointA.Y = -screenPointA.Y; 17 screenPointB.Y = -screenPointB.Y; 18 screenPointC.Y = -screenPointC.Y; 19 20 screenPointA.Y=screenPointA.Y+offsety; 21 screenPointB.Y= screenPointB.Y+offsety; 22 screenPointC.Y = screenPointC.Y + offsety; 23 24 screenPointA.X = screenPointA.X + offsetx; 25 screenPointB.X = screenPointB.X + offsetx; 26 screenPointC.X = screenPointC.X + offsetx; 27 28 System.Drawing.Drawing2D.GraphicsPath ph = new System.Drawing.Drawing2D.GraphicsPath( 29 new PointF[] { screenPointA, screenPointB, screenPointC }, 30 new byte[] { 1, 1, 1 }, 31 System.Drawing.Drawing2D.FillMode.Winding); 32 33 34 //---求法向量及夹角 如果为true 则渲染面//计算当前管线三角面片的法向量 是否朝着镜头 ,最终决定是否可见 35 if (angelCalc(msh.points[msh.path1[i * 3]], msh.points[msh.path1[i * 3+1]], msh.points[msh.path1[i * 3+2]]) == true) 36 gph.FillPath(msh.faceColors[i], ph); 37 } 38 39 //绘制边框 40 gph.DrawLine(Pens.Red, new PointF(offsetx - 36, offsety - 36), new PointF(offsetx + 36, offsety - 36)); 41 gph.DrawLine(Pens.Red, new PointF(offsetx + 36, offsety - 36),new PointF(offsetx + 36, offsety + 36)); 42 gph.DrawLine(Pens.Red, new PointF(offsetx + 36, offsety +36), new PointF(offsetx - 36, offsety + 36)); 43 gph.DrawLine(Pens.Red, new PointF(offsetx - 36, offsety + 36), new PointF(offsetx - 36, offsety - 36)); 44 45 ////绘制网格线 46 //screenLastPoint = PointF.Empty; 47 //for (int i = 0; i < msh.path1.Count / 3; i++) 48 //{ 49 // //if (i >= 4) 50 // // return; 51 // PointF screenPointA = new PointF((float)((-nearPlan) * (msh.points[msh.path1[i * 3]].x / msh.points[msh.path1[i * 3]].z)), (float)((-nearPlan) * (msh.points[msh.path1[i * 3]].y / msh.points[msh.path1[i * 3]].z))); 52 // PointF screenPointB = new PointF((float)((-nearPlan) * (msh.points[msh.path1[i * 3 + 1]].x / msh.points[msh.path1[i * 3 + 1]].z)), (float)((-nearPlan) * (msh.points[msh.path1[i * 3 + 1]].y / msh.points[msh.path1[i * 3 + 1]].z))); 53 // PointF screenPointC = new PointF((float)((-nearPlan) * (msh.points[msh.path1[i * 3 + 2]].x / msh.points[msh.path1[i * 3 + 2]].z)), (float)((-nearPlan) * (msh.points[msh.path1[i * 3 + 2]].y / msh.points[msh.path1[i * 3 + 2]].z))); 54 55 // screenPointA.Y = -screenPointA.Y; 56 // screenPointB.Y = -screenPointB.Y; 57 // screenPointC.Y = -screenPointC.Y; 58 59 // screenPointA.Y = screenPointA.Y + offsety; 60 // screenPointB.Y = screenPointB.Y + offsety; 61 // screenPointC.Y = screenPointC.Y + offsety; 62 63 // screenPointA.X = screenPointA.X + offsetx; 64 // screenPointB.X = screenPointB.X + offsetx; 65 // screenPointC.X = screenPointC.X + offsetx; 66 67 // gph.DrawLine(Pens.Red, screenPointA, screenPointB); 68 // gph.DrawLine(Pens.Red, screenPointB, screenPointC); 69 // gph.DrawLine(Pens.Red, screenPointC, screenPointA); 70 71 //} 72 73 }
绕着坐标轴进行旋转
最开始我没有绘制面只是绘制的顶点线框而已 。然后我想做的是旋转 让他转起来,总共八个点连成线就是立方体了,哪怕是low逼的线条 只要转起来是不是就有立方体的样子了。 哇哈哈哈哈。最开始我想的很简单啊 立体的旋转也没啥不得了的啊 ,比如饶y轴旋转 我把他当成平面的不就得了么 y不变x和z变。 绕x轴旋转 同理。 我原来也写过平面的点进行旋转的计算。 为了符合图形学上的标准方式 最后我还是使用二维矩阵旋转的方式:
1 public void RotationTest2() 2 { 3 4 //二维空间旋转矩阵为 : x是角度 5 //cos(x) -sin(x) (1-cos(x))tx+ty*sin(x)) x 6 //Sin(x) cos(x) (1-cos(x))ty-tx*sin(x)) y 7 8 //2pi 等于360度 9 //绕y轴旋转 10 //double xita = ((Math.PI * 2d) / 360d) * 2d; 11 double xita = ((Math.PI * 2d) / 360d) * anglex; 12 double cosx = Math.Cos(xita); 13 double sinx = Math.Sin(xita); 14 15 double xitay = ((Math.PI * 2d) / 360) * angley; 16 double cosy = Math.Cos(xitay); 17 double siny = Math.Sin(xitay); 18 19 for (int i = 0; i < msh.points.Count; i++) 20 { 21 //Point3dF tmpPoint = new Point3dF(msh.points[i].x, msh.points[i].y, msh.points[i].z); 22 Point3dF tmpPoint = new Point3dF(mshSource.points[i].x, mshSource.points[i].y, mshSource.points[i].z); 23 msh.points[i].x = 24 tmpPoint.x * cosx + ((-sinx) * tmpPoint.z) + 25 (((1d - cosx) * 0d) + ((-130d) * sinx)); 26 27 msh.points[i].z = 28 tmpPoint.x * sinx + (cosx * tmpPoint.z) + 29 (((1d - cosx) * (-130d)) - ((0d) * sinx)); 30 31 msh.points[i].y = tmpPoint.y; 32 33 //--------------------------------- 34 tmpPoint = new Point3dF(msh.points[i].x, msh.points[i].y, msh.points[i].z); 35 36 msh.points[i].y = tmpPoint.y * cosy + ((-siny) * tmpPoint.z) + 37 (((1d - cosy) * 0d) + ((-130d) * siny)); 38 39 msh.points[i].z = tmpPoint.y * siny + (cosy * tmpPoint.z) + 40 (((1d - cosy) * (-130d)) - ((0d) * siny)); 41 } 42 43 }
注意了 绕着任意轴进行旋转
现在我想做的是做一个跟踪球效果 。鼠标按下拖动的时候让物体 像烤肉串样绕着一根轴旋转。 网上跟踪球都是旋转相机 我们这里直接旋转物体坐标。绕着任意轴旋转啊绕着任意轴旋转的矩阵 说实话 3D旋转矩阵这个我搞不懂 ,我看不懂推导过程 但是我会看公式 哇哈哈哈哈。
https://www.cnblogs.com/graphics/archive/2012/08/10/2627458.html
其他的博文里贴出来的旋转矩阵也是这样 直接把他的代码抄下来之 ,c++的 我抄成c#的 没啥难的 我已经超过好些c++代码了。总之我们要做的就是 得出一个二维数组作为矩阵回传 让所有坐标根据此矩阵进行运算。注意有两个基本概念: 两个点相减 a-b 得出的是 b到a 的向量 (0,0) -(1,1) =(-1,-1) ,然后是向量归一化: 什么叫归一化, 就是 把向量的方向不变 长度变到单位长度 ,也就是1。问向量归一化怎么搞 。好 ,比如一个二维向量,计算原理就是通过距离计算公式 得出距离。这个距离与1的比值等于 现x与归一化后x的比值:
得出距离。这个距离与1的比值等于 现x与归一化后x的比值: 求归一化后y的值同理。当然这些都是基础的没什么特别说的。
求归一化后y的值同理。当然这些都是基础的没什么特别说的。
求旋转矩阵的函数:
1 //得到旋转矩阵 2 double[,] RotateArbitraryLine(Point3dF v1, Point3dF v2, double theta) 3 { 4 5 double a = v1.x; 6 double b = v1.y; 7 double c = v1.z; 8 Point3dF p = new Point3dF(v2.x - v1.x, v2.y - v1.y, v2.z - v1.z); 9 //v2归一化 10 double x_p2 = p.x / Math.Sqrt(Math.Pow(p.x, 2) + Math.Pow(p.y, 2)); 11 double y_p2 = p.y / Math.Sqrt(Math.Pow(p.x, 2) + Math.Pow(p.y, 2)); 12 13 if (double.IsNaN(x_p2)) 14 x_p2 = 0; 15 if (double.IsNaN(y_p2)) 16 y_p2 = 0; 17 18 double u = x_p2; 19 double v = y_p2; 20 double w = 0d;// -130d;// 0d; 21 22 double uu = u * u; 23 double uv = u * v; 24 double uw = u * w; 25 double vv = v * v; 26 double vw = v * w; 27 double ww = w * w; 28 double au = a * u; 29 double av = a * v; 30 double aw = a * w; 31 double bu = b * u; 32 double bv = b * v; 33 double bw = b * w; 34 double cu = c * u; 35 double cv = c * v; 36 double cw = c * w; 37 38 double costheta = Math.Cos(theta); 39 double sintheta = Math.Sin(theta) ; 40 double[,] pOut = new double[4, 4]; 41 pOut[0,0] = uu + (vv + ww) * costheta; 42 pOut[1,0] = uv * (1 - costheta) + w * sintheta; 43 pOut[2,0] = uw * (1 - costheta) - v * sintheta; 44 pOut[3,0] = 0; 45 46 pOut[0,1] = uv * (1 - costheta) - w * sintheta; 47 pOut[1,1] = vv + (uu + ww) * costheta; 48 pOut[2,1] = vw * (1 - costheta) + u * sintheta; 49 pOut[3,1] = 0; 50 51 pOut[0,2] = uw * (1 - costheta) + v * sintheta; 52 pOut[1,2] = vw * (1 - costheta) - u * sintheta; 53 pOut[2,2] = ww + (uu + vv) * costheta; 54 pOut[3,2] = 0; 55 56 pOut[0,3] = (a * (vv + ww) - u * (bv + cw)) * (1 - costheta) + (bw - cv) * sintheta; 57 pOut[1,3] = (b * (uu + ww) - v * (au + cw)) * (1 - costheta) + (cu - aw) * sintheta; 58 pOut[2,3] = (c * (uu + vv) - w * (au + bv)) * (1 - costheta) + (av - bu) * sintheta; 59 pOut[3,3] = 1; 60 61 return pOut; 62 }
函数写好了 矩阵也能得出了,还有个问题:函数的那几个参数 ,旋转的度数也好搞 按下的时候记录一个点 拖动的时候计算跟他的距离 距离作为度数 拖动50像素 旋转50度。 旋转的那根儿轴你怎么得出来,开始点容易 立方体的中心是0 0 -130 。按下的时候记录了按下开始点 鼠标的移动就已经是一个向量了 所以我们只需要对这个向量 绕z轴进行90度旋转 ,z也设成-130 就跟中心点平齐了 就是需要的烤肉串儿的旋转轴了。 好 原理讲完了 ,代码走起:
1 private void Form1_MouseMove(object sender, MouseEventArgs e) 2 { 3 //必须要得出旋转的轴才行 4 if (pressed) 5 { 6 7 //中心点 0,0,-130 8 //通过拖动远近决定旋转角度,垂直向量 得到旋转轴 9 10 //得出鼠标拖动向量 11 12 Point3dF dragJuli = new Point3dF((e.Location.X - startPoint.X),( e.Location.Y - startPoint.Y),-130d); 13 //还要旋转90度才是真正的旋转轴 14 //cos(x) -sin(x) 15 //Sin(x) cos(x) 16 double cos90=0d; 17 double sin90=1d; 18 var x = dragJuli.x * 0d + dragJuli.y * 1d; 19 var y = dragJuli.x * 1d + dragJuli.y * 0d; 20 21 Point3dF dragJuli2 = new Point3dF(x, y, dragJuli.z); 22 23 //Point3dF dragJuli90= 24 //x1 x2+y1 y2=0 25 //double x2=(-dragJuli.y)/(dragJuli.x); 26 //垂直的旋转轴向量 27 //Point3dF roll = new Point3dF(x2, 1, -130); 28 29 //拖动距离 拖动距离等于角度 30 angelourua= Math.Sqrt(Math.Pow((e.Location.X - startPoint.X), 2) + Math.Pow((e.Location.Y - startPoint.Y), 2)); 31 angelourua = angelourua % 360; 32 angelourua = ((Math.PI * 2d) / 360d) * angelourua; 33 34 double[,] roatMatarix= RotateArbitraryLine(new Point3dF(0, 0, -130d), dragJuli2,angelourua); 35 36 RotationTest(roatMatarix); 37 paint(); 38 39 } 40 }
好就这样 先进行3d空间的点旋转, 再进行平面坐标映射绘制 用线连起来。是不是就有点3D立体的样子了。哇哈哈哈哈
注意了 面绘制
前面的都是有些挖的别人的,这个功能绝对是自己捣鼓出来的。开始那些不论是两两之间的线条绘制啥的都只能算是 点绘制 ,我们现在要进行面绘制。首先你要清楚的是我的顶点三角面片数据已经给出了, 3d坐标点打在半透明纸张上 的x,y 也已经得出了。 调用gdi的fillpath按ABC 的顺序连起来 就能绘制一个三角面片 是不是很简单。但是先别慌 还有两个问题需要处理,一个就是可见面判别。 就是两个三角面片 的位置 决定了 在透视投影的时候哪个在前哪个在后, 还有面相交的情况呢 ? 是不是很复杂?其实根本不用管,即使要管 只要你使用z缓冲算法 也不是很复杂 zbuffer 。就是在求出屏幕x y过后把同xy的点z越靠近视点的放在前面 这样就达到目的了。这里我们先 不管这个zbuffer算法 下次有空闲了我们再来写。这里我们使用另外一种方式 通过判别正向面与后向面来达到目的。前面我们不是说了吗 :
我们通过计算每个三角面片的法向量, 然后我们有一个视点到三角面片的向量 ,通过计算两向量的点积  然后通过反余弦函数就可以得出两向量的夹角 。 如果夹角大于90度代表三角面片正向面朝着视点, 如果小于90度代表正向面背对了视点, 则不对这个三角面片进行渲染。如此一来 你仔细想想 我们的立方体至始至终不会存在一个面把另一个面遮挡的情况。
然后通过反余弦函数就可以得出两向量的夹角 。 如果夹角大于90度代表三角面片正向面朝着视点, 如果小于90度代表正向面背对了视点, 则不对这个三角面片进行渲染。如此一来 你仔细想想 我们的立方体至始至终不会存在一个面把另一个面遮挡的情况。
好了原理讲至此 好下面 根据原理撸代码:
1 //平面是否面向摄像机的判别 2 public bool angelCalc( Point3dF A,Point3dF B,Point3dF C) 3 { 4 //https://zhidao.baidu.com/question/810216091258785532.html 5 //AB、AC所在平面的法向量即AB×AC=(a,b,c),其中: 6 //a=(y2-y1)(z3-z1)-(z2-z1)(y3-y1) 7 //b=(z2-z1)(x3-x1)-(z3-z1)(x2-x1) 8 //c=(x2-x1)(y3-y1)-(x3-x1)(y2-y1) 9 10 //先得出点 对应的向量 11 //Point3dF AB = new Point3dF(B.x - A.x, B.y - A.y, B.z - A.z); 12 13 //首先求出法向量 14 double a = ((B.y - A.y)*(C.z - A.z) - (B.z - A.z)*(C.y - A.y)); 15 double b = (B.z - A.z) * (C.x - A.x) - (C.z - A.z) * (B.x - A.x); 16 double c = (B.x - A.x) * (C.y - A.y) - (C.x - A.x) * (B.y - A.y); 17 Point3dF bb = new Point3dF(a, b, c); 18 //套公式 第二册 下b 39 通过两向量的cos函数 继而通过反余弦得出角度 19 var angelPlan =Math.Acos( 20 (A.x * bb.x + A.y * bb.y + A.z * bb.z) / ( 21 Math.Sqrt(Math.Pow(A.x, 2) + Math.Pow(A.y, 2) + Math.Pow(A.z, 2)) * 22 Math.Sqrt(Math.Pow(bb.x, 2) + Math.Pow(bb.y, 2) + Math.Pow(bb.z, 2)) 23 ) 24 ); 25 26 if (angelPlan > (Math.PI / 2))//法向量与镜头的夹角大于90度 代表三角面片面向摄像机 则可见 27 return true; 28 else//否则不可见 29 return false; 30 }
关于光照
光照这玩意儿还是 用到三角面片的法向量 ,三角面片正对着光 则表面亮度最高 ,垂直则变成黑暗。参照面绘制的原理就可以搞出来 我这里就每个面各用些五颜六色的颜色算了吧 懒得整了。
其他的
还有我的摄像机镜头是固定的 ,其实还有很多工作需要做 。 希望各位大大继续完善。看下效果 是不是有模有样:上个gif图: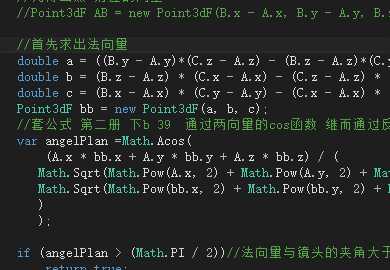
你可以把平面面向摄像机判别函数返回的值反向一下看看什么效果,是不是看到内壁的那一面了 是不是很神奇哇哈哈哈哈
是的你没看错就这么几百行核心部分就实现了 差不多都是数学知识 ,其他的都是添砖加瓦的事,原理都在这了。 好了 以后再看DirectX 啊OpenGL啊 图形学 变换矩阵啊那些的 别被唬住了 没那么难的。
按说的话这些知识总体来说蛮难的 但是毕竟还是学过高中的向量 两向量垂直时点积等于零 这些之类的 , 靠着摸着石头过河 把这些半懂不懂的知识 拼凑起来 加上各种度娘 和查资料 来实现 没想到竟然成功了。 意外意外 ,当然学习是要靠自己的 你想直接度娘给你出来个你要的效果 那是不可能的。
标签:span 空闲 bit net 实现 ota art void 摄像机
原文地址:http://www.cnblogs.com/assassinx/p/7896478.html