标签:调整 化学 for center enter super src strong via
深度强化学习之:模仿学习(imitation learning)
2017.12.10
本文所涉及到的 模仿学习,则是从给定的展示中进行学习。机器在这个过程中,也和环境进行交互,但是,并没有显示的得到 reward。在某些任务上,也很难定义 reward。如:自动驾驶,撞死一人,reward为多少,撞到一辆车,reward 为多少,撞到小动物,reward 为多少,撞到 X,reward 又是多少,诸如此类。。。而某些人类所定义的 reward,可能会造成不可控制的行为,如:我们想让 agent 去考试,目标是让其考 100,那么,这个 agent 则可能会为了考 100,而采取作弊的方式,那么,这个就比较尴尬了,是吧 ?我们当然想让 agent 在学习到某些本领的同时,能遵守一定的规则。给他们展示怎么做,然后让其自己去学习,会是一个比较好的方式。
本文所涉及的三种方法:1. 行为克隆,2. 逆强化学习,3. GAN 的方法
接下来,我们将分别介绍这三种方法:
一、Behavior Cloning :
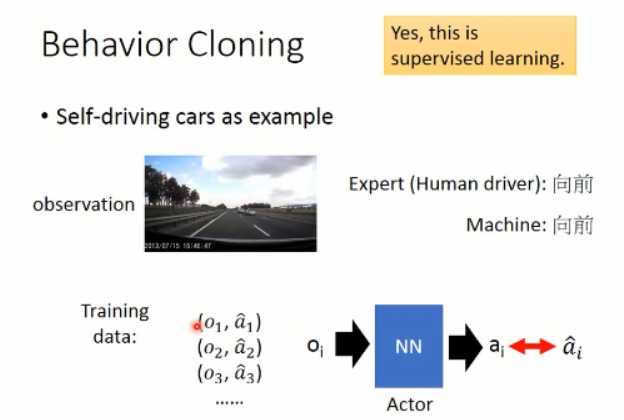
这里以自动驾驶为例,首先我们要收集一堆数据,就是 demo,然后人类做什么,就让机器做什么。其实就是监督学习(supervised learning),让 agent 选择的动作和 给定的动作是一致的。。。
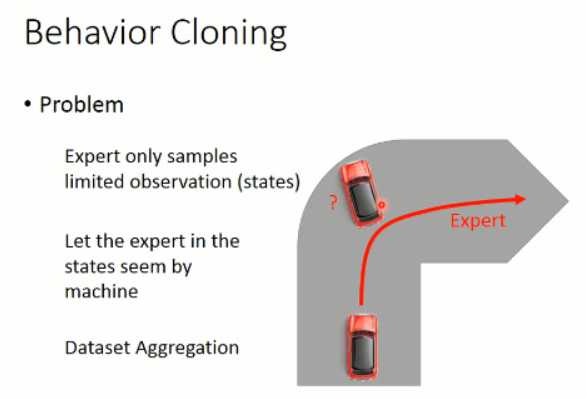
但是,这个方法是有问题的,因为 你给定的 data,是有限的,而且是有限制的。那么,在其他数据上进行测试,则可能不会很好。
要么,你增加 training data,加入平常 agent 没有看到过的数据,即:dataset aggregation 。
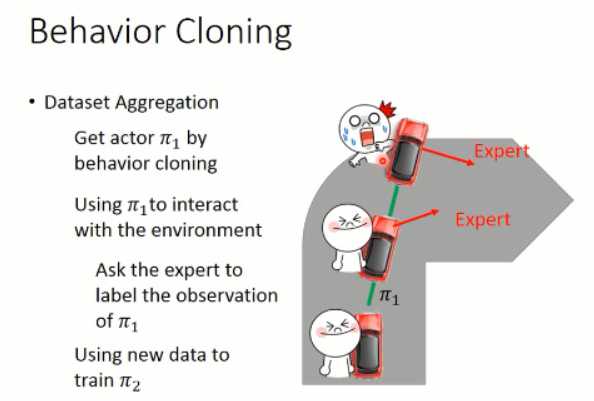
通过不断地增加数据,那么,就可以很好的改进 agent 的策略。有些场景下,也许适应这种方法。。。
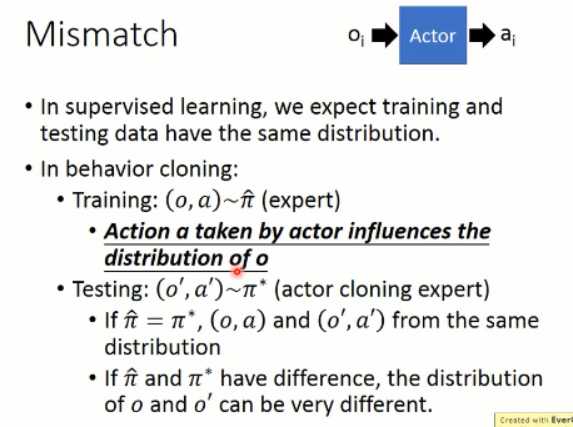
而且,你的观测数据 和 策略是有联系的。因为在监督学习当中,我们需要 training data 和 test data 独立同分布。但是,有时候,这两者是不同的,那么,就惨了。。。
于是,另一类方法,出现了,即:Inverse Reinforcement Learning (也称为:Inverse Optimal Control,Inverse Optimal Planning)。
二、Inverse Reinforcement Learning (“Apprenticeship learning via Inverse Reinforcement Learning”, ICML 2004)
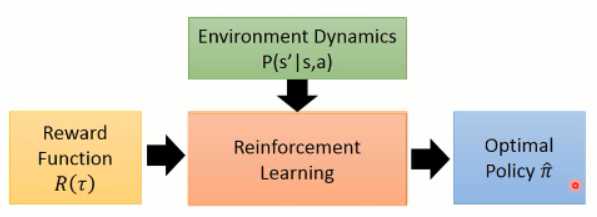
顾名思义,IRL 是 反过来的 RL,RL 是根据 reward 进行参数的调整,然后得到一个 policy。大致流程应该是这个样子:
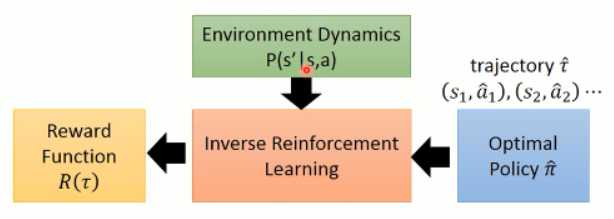
但是, IRL 就不同了,因为他没有显示的 reward,只能根据 人类行为,进行 reward的估计(反推 reward 的函数)。
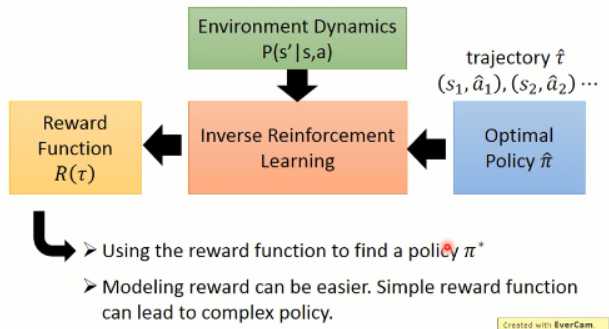
在得到 reward 函数估计出来之后,再进行 策略函数的估计。。。
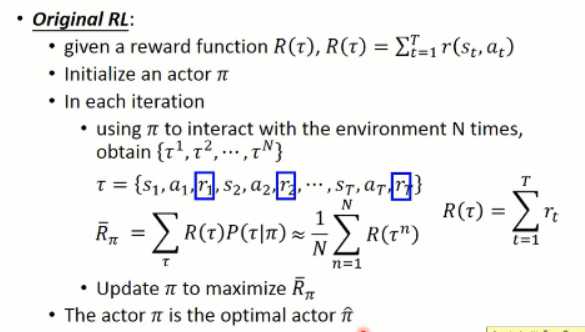
原本的 RL,就是给定一个 reward function R(t)(奖励的加和,即:回报),然后,这里我们回顾一下 RL 的大致过程(这里以 policy gradient 方法为例)
而 Inverse Reinforcement Learning 这是下面的这个思路:
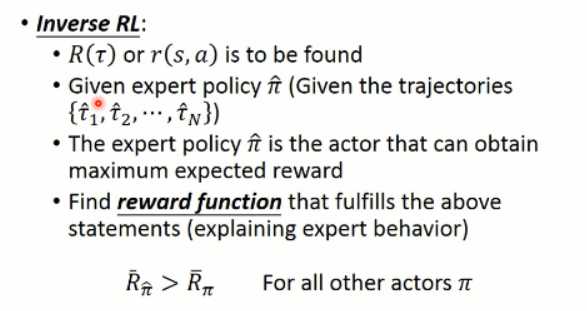
逆强化学习 则是在给定一个专家之后(expert policy),通过不断地寻找 reward function 来满足给定的 statement(即,解释专家的行为,explaining expert behavior)。。。
专家的这个回报是最大的,英雄级别的,比任何其他的 actor 得到的都多。。。
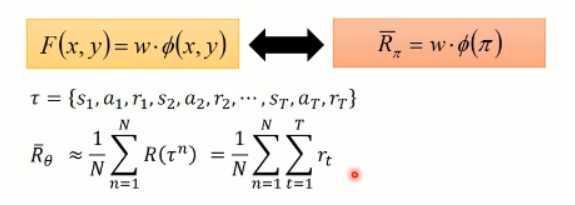
据说,这个 IRL 和 structure learning 是非常相似的:
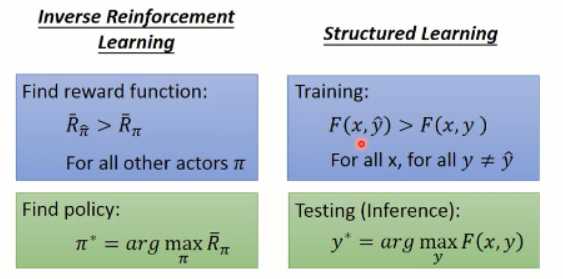
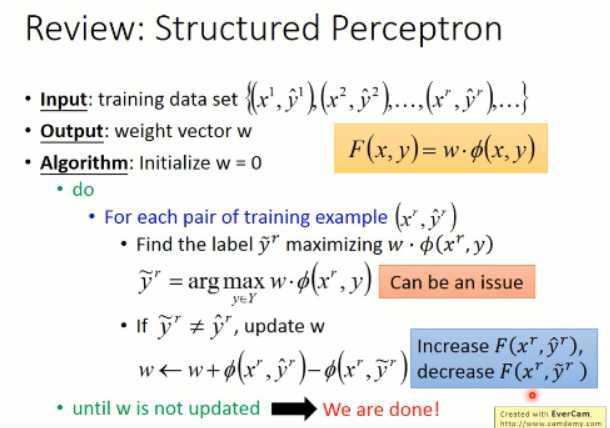
可以看到,貌似真是的哎。。。然后,复习下什么是 结构化学习:
我们对比下, IRL 和 结构化学习:
深度强化学习之:模仿学习(imitation learning)
标签:调整 化学 for center enter super src strong via
原文地址:http://www.cnblogs.com/wangxiaocvpr/p/8016414.html