第一次接触SPI是因为当时用到NRF24L01,需要用SPI进行通信。因为2401上面写着MOSI、MISO、SS、RST,当时以为只要用到SPI就肯定有这几个引脚,以至于限制了自己的思维。只认识MISO/MOSI/,并不知道他们的真实意义。所以后来遇到DO、DI、CS、RES时,就不知道是什么意思了。真是一知半解。下面就说说一些关于SPI的那些事。
参考博客:https://www.cnblogs.com/deng-tao/p/6004280.html
1、什么是SPI?
SPI是串行外设接口(Serial Peripheral Interface)的缩写。是 Motorola 公司推出的一 种同步串行接口技术,是一种高速的,全双工,同步的通信总线。
2、SPI优点
支持全双工通信、通信简单、数据传输速率块
3、缺点
没有指定的流控制,没有应答机制确认是否接收到数据,所以跟IIC总线协议比较在数据 可靠性上有一定的缺陷。
4、特点
1):高速、同步、全双工、非差分、总线式
2):主从机通信模式
5、协议通信时序详解
1):SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多 个从设备,需要至少4根线,事实上3根也可以(单向传输时)。也是所有基于SPI的设备共有的,它们是
SDI(数据输入)、SDO(数据输出)、SCLK(时钟)、CS(片选)。
(1)SDO/MOSI ((master out slaver in))– 主设备数据输出,从设备数据输入;
(2)SDI/MISO – 主设备数据输入,从设备数据输出;
(3)SCLK – 时钟信号,由主设备产生;
(4)CS/SS – 从设备使能信号,由主设备控制。当有多个从设备的时候,因为每个从设 备上都有一个片选引脚接入到主设备机中,当我们的主设备和某个从设备通信时将需 要将从设备对应的片选引脚电平拉低或者是拉高。

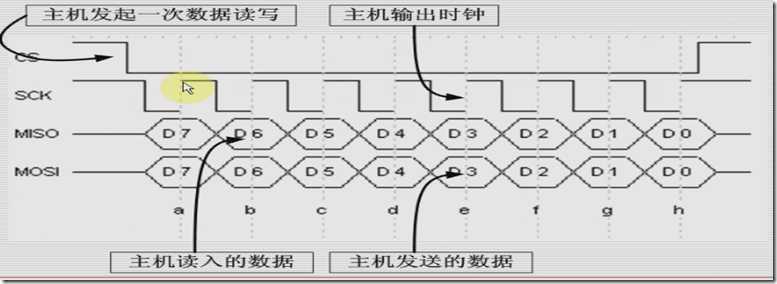
SPI时序图举例:四线制,高位在前,下降沿跳边,上升沿采样。
2):需要说明的是,我们SPI通信有4种不同的模式,不同的从设备可能在出厂是就是配 置为某种模式,这是不能改变的;但我们的通信双方必须是工作在同一模式下,所以我们 可以对我们的主设备的SPI模式进行配置,通过CPOL(时钟极性)和CPHA(时钟相位)来 控制我们主设备的通信模式,具体如下:
Mode0:CPOL=0,CPHA=0
Mode1:CPOL=0,CPHA=1
Mode2:CPOL=1,CPHA=0
Mode3:CPOL=1,CPHA=1
时钟极性CPOL是用来配置SCLK的电平出于哪种状态时是空闲态或者有效态,时钟相位CPHA 是用来配置数据采样是在第几个边沿:
CPOL=0,表示当SCLK=0时处于空闲态,所以有效状态就是SCLK处于高电平时
CPOL=1,表示当SCLK=1时处于空闲态,所以有效状态就是SCLK处于低电平时
CPHA=0,表示数据采样是在第1个边沿,数据发送在第2个边沿
CPHA=1,表示数据采样是在第2个边沿,数据发送在第1个边沿
需要注意的是:我们的主设备能够控制时钟,因为我们的SPI通信并不像UART或者IIC通信 那样有专门的通信周期,有专门的通信起始信号,有专门的通信结束信号;这些SPI都没有。所以我们的 SPI协议能够通过控制时钟信号线,当没有数据交流的时候我们的时钟线要么是保持高电平要么是保持低电平。
程序仿真:
/* SPI写数据/命令 * Mode :O:写命令 1:写数据 * data :数据/命令 */ void SPI_Write(char data, int Mode) { int i = 0; if(Mode) { OLED_DC(1); //DC引脚输入高,表示写数据 } else { OLED_DC(0); //DC引脚输入低,表示写命令 } OLED_CS(0); //CS引脚输入低,片选使能 for(i = 0; i < 8; i++) { OLED_D0(0); //D0引脚输入低 if(data&0x80) //判断传输的数据最高位为1还是0 { OLED_D1(1); //D1引脚输入高 } else { OLED_D1(0); //D1引脚输入低 } OLED_D0(1); //D1引脚输入高 data<<=1; //将数据左移一位 } OLED_DC(0); //DC引脚输入低 OLED_CS(1); //CS引脚输入高,片选失能 }