接着上一篇的介绍继续
关于在使用readHeader函数读取点云数据头的类型的代码(Read a point cloud data header from a PCD file.)
pcl::PCLPointCloud2 cloud; int version; Eigen::Vector4f origin; Eigen::Quaternionf orientation; pcl::PCDReader r; int type; unsigned int idx; //读取PCD文件的头的基本信息 /*(in)path.string ()文件名 cloud 点云数据集 origin传感器的采集中心点 orientation传感器的方位 version为PCD版本 type数据类型(0 = ASCII,1 =二进制,2 =二进制压缩)(in)idx为在文件内的偏移点云数据*/ r.readHeader (path.string (), cloud, origin, orientation, version, type, idx);
查看PCD文件里的内容(其实对于如何生成这种高纬度的文件呢?)
# .PCD v.7 - Point Cloud Data file format 注释掉说明这是关于点云的文件格式 VERSION .7 PCD文件的版本号 FIELDS x y z rgb u v vx vy vz normal_x normal_y normal_z curvature 文件中点云的维度数 SIZE 4 4 4 4 4 4 4 4 4 4 4 4 4 每个维度数据的大小 TYPE F F F F F F F F F F F F F 数据的类型 COUNT 1 1 1 1 1 1 1 1 1 1 1 1 1 WIDTH 3484 点云大小 HEIGHT 1 无序点云 VIEWPOINT 0 0 0 1 0 0 0 视点 POINTS 3484 大小 DATA ascii 数据 -0.0042959 -0.041022 0.97549 7.3757e-39 275 261 0 0 0 -0.15142 0.63581 -0.75685 0.018435 -0.0031521 -0.040989 0.97472 7.0991e-39 276 261 0 0 0 -0.12262 0.63448 -0.76315 0.017282 -0.0042959 -0.03988 0.97549 5.9927e-39 299 261 0 0 0 -0.15385 0.62475 -0.76552 0.017079 -0.0020133 -0.03988 0.97549 5.3473e-39 347 261 0 0 0 -0.11114 0.62014 -0.77658 0.015706 -0.00087171 -0.039294 0.9751 5.6239e-39 277.5 261.5 0 0 0 -0.089597 0.61557 -0.78297 0.015285
另外一种PCD文件的比如VFH的PCD文件
# .PCD v.6 - Point Cloud Data file format FIELDS vfh SIZE 4 TYPE F COUNT 308 WIDTH 1 HEIGHT 1 POINTS 1 DATA ascii 0 0 0 0 0 0 0 0 0.086133 0.31582 ........................................................
那么接下来我们就可以使用PCL给定的数据集,以及FLANN的库是实现对点云的识别,方法是按照(1)的思路来做的
首先我们是假设已经有了数据集,以及相应每个数据集的VFH全局表述子的PCD文件,这样我们就可以使用(1)中的思路把数据集训练并保存到数中,方便之后我们再输入给定的点云的VFH的PCD文件进行查找
那么其实这里面,我们如果是自己生成数据集,并对每个数据生成对应的VFH文件就会有点难度,毕竟这是对采集到的数据,对于一些无关点云需要剔除,
然后对有用的有价值的点云数据进行聚类,以及各个角度的点云聚类,然后对聚类的对象生成对应的VFH的特征PCD文件,这就是大致思路,
那么我们来看一下源代码是如何读取并训练数据源的,并生成可用于FLANN使用的文件,并存在磁盘中
源代码分析如下
#include <pcl/point_types.h> //点云的类型 #include <pcl/point_cloud.h> #include <pcl/console/parse.h> #include <pcl/console/print.h> #include <pcl/io/pcd_io.h> #include <boost/filesystem.hpp> #include <flann/flann.h> #include <flann/io/hdf5.h> #include <fstream> //pair的成员有两个first second两个,很明显第一个vfh_model.first就是std::string //vfh_model.second就是存入的float的变量 typedef std::pair<std::string, std::vector<float> > vfh_model;//用于存储VFH模型的容器 /** \brief Loads an n-D histogram file as a VFH signature 以VFH作为特征直方图 * \param path the input file name 输入的文件的名称 * \param vfh the resultant VFH model //VFH的模型 */ bool loadHist (const boost::filesystem::path &path, vfh_model &vfh) { int vfh_idx; // Load the file as a PCD try { pcl::PCLPointCloud2 cloud; int version; Eigen::Vector4f origin; //中心float的向量 Eigen::Quaternionf orientation; //方向 pcl::PCDReader r; int type; unsigned int idx; r.readHeader (path.string (), cloud, origin, orientation, version, type, idx); vfh_idx = pcl::getFieldIndex (cloud, "vfh"); if (vfh_idx == -1) return (false); if ((int)cloud.width * cloud.height != 1) //点的数目不为0 return (false); } catch (const pcl::InvalidConversionException&) //抛出异常 { return (false); } // Treat the VFH signature as a single Point Cloud把相应的VFH特征代表单个点云 pcl::PointCloud <pcl::VFHSignature308> point; //申明VFH 的点云 pcl::io::loadPCDFile (path.string (), point); vfh.second.resize (308); //因为VFH有308个数据 std::vector <pcl::PCLPointField> fields; pcl::getFieldIndex (point, "vfh", fields); for (size_t i = 0; i < fields[vfh_idx].count; ++i) { vfh.second[i] = point.points[0].histogram[i]; //每个点的直方图 } vfh.first = path.string (); return (true); } /** \brief Load a set of VFH features that will act as the model (training data) //以VFH特征作为模型的训练数据集 * \param argc the number of arguments (pass from main ()) //输入参数的个数 * \param argv the actual command line arguments (pass from main ()) * \param extension the file extension containing the VFH features 文件名的后缀 * \param models the resultant vector of histogram models //特征模型的直方图向量 */ void loadFeatureModels (const boost::filesystem::path &base_dir, const std::string &extension, std::vector<vfh_model> &models) { if (!boost::filesystem::exists (base_dir) && !boost::filesystem::is_directory (base_dir)) return; for (boost::filesystem::directory_iterator it (base_dir); it != boost::filesystem::directory_iterator (); ++it) //对文件下每一个VFH的PCD文件计数 { if (boost::filesystem::is_directory (it->status ())) { std::stringstream ss; //输入 ss << it->path (); pcl::console::print_highlight ("Loading %s (%lu models loaded so far).\n", ss.str ().c_str (), (unsigned long)models.size ()); loadFeatureModels (it->path (), extension, models); } if (boost::filesystem::is_regular_file (it->status ()) && boost::filesystem::extension (it->path ()) == extension) { vfh_model m; if (loadHist (base_dir / it->path ().filename (), m)) models.push_back (m); //装进容器中 } } } int main (int argc, char** argv) { if (argc < 2) //对输入命令行的解析 { PCL_ERROR ("Need at least two parameters! Syntax is: %s [model_directory] [options]\n", argv[0]); return (-1); } std::string extension (".pcd"); transform (extension.begin (), extension.end (), extension.begin (), (int(*)(int))tolower); std::string kdtree_idx_file_name = "kdtree.idx"; std::string training_data_h5_file_name = "training_data.h5"; std::string training_data_list_file_name = "training_data.list"; std::vector<vfh_model> models; //VFH的模型 // Load the model histograms 载入模型的直方图 loadFeatureModels (argv[1], extension, models); pcl::console::print_highlight ("Loaded %d VFH models. Creating training data %s/%s.\n", (int)models.size (), training_data_h5_file_name.c_str (), training_data_list_file_name.c_str ()); // Convert data into FLANN format 把数据转为FLANN格式 flann::Matrix<float> data (new float[models.size () * models[0].second.size ()], models.size (), models[0].second.size ()); for (size_t i = 0; i < data.rows; ++i) for (size_t j = 0; j < data.cols; ++j) data[i][j] = models[i].second[j]; // Save data to disk (list of models)保存数据集到本地 flann::save_to_file (data, training_data_h5_file_name, "training_data"); std::ofstream fs; fs.open (training_data_list_file_name.c_str ()); //打开训练数据集的文件 for (size_t i = 0; i < models.size (); ++i) fs << models[i].first << "\n"; fs.close (); // Build the tree index and save it to disk 建立树索引并保存 pcl::console::print_error ("Building the kdtree index (%s) for %d elements...\n", kdtree_idx_file_name.c_str (), (int)data.rows); flann::Index<flann::ChiSquareDistance<float> > index (data, flann::LinearIndexParams ()); //flann::Index<flann::ChiSquareDistance<float> > index (data, flann::KDTreeIndexParams (4)); index.buildIndex (); index.save (kdtree_idx_file_name); delete[] data.ptr (); return (0); }
这里面就很明显的生成了两个可用于FLANN进行搜索匹配的文件,以及模型的名称的列表,就是会生成以下三个文件
kdtree.idx(这个是kdtree模型的索引)
training_data.h5(用于FLANN库中的一种高效的文件格式,上一章有介绍),
training_data.list(这是训练数据集的列表)
(2)那么对于已经生成好的点云的数据集,我们就需要使用写一个程序来实现给定一个点云的VFH的PCD文件来寻找这个点云所在位置并且是什么角度拍照的结果,闲话少说明,直接就上程序
#include <pcl/point_types.h> #include <pcl/point_cloud.h> #include <pcl/common/common.h> #include <pcl/common/transforms.h> #include <pcl/visualization/pcl_visualizer.h> #include <pcl/console/parse.h> #include <pcl/console/print.h> #include <pcl/io/pcd_io.h> #include <iostream> #include <flann/flann.h> #include <flann/io/hdf5.h> #include <boost/filesystem.hpp> typedef std::pair<std::string, std::vector<float> > vfh_model; /** \brief Loads an n-D histogram file as a VFH signature * \param path the input file name * \param vfh the resultant VFH model */ bool loadHist (const boost::filesystem::path &path, vfh_model &vfh) { int vfh_idx; // Load the file as a PCD try { pcl::PCLPointCloud2 cloud; int version; Eigen::Vector4f origin; Eigen::Quaternionf orientation; pcl::PCDReader r; int type; unsigned int idx; //读取PCD文件的头的基本信息 /*(in)path.string ()文件名 cloud 点云数据集 origin传感器的采集中心点 orientation传感器的方位 version为PCD版本 type数据类型(0 = ASCII,1 =二进制,2 =二进制压缩)(in)idx为在文件内的偏移点云数据*/ r.readHeader (path.string (), cloud, origin, orientation, version, type, idx); vfh_idx = pcl::getFieldIndex (cloud, "vfh"); if (vfh_idx == -1) return (false); if ((int)cloud.width * cloud.height != 1) return (false); } catch (const pcl::InvalidConversionException&) { return (false); } // Treat the VFH signature as a single Point Cloud pcl::PointCloud <pcl::VFHSignature308> point; pcl::io::loadPCDFile (path.string (), point); vfh.second.resize (308); std::vector <pcl::PCLPointField> fields; getFieldIndex (point, "vfh", fields); for (size_t i = 0; i < fields[vfh_idx].count; ++i) { vfh.second[i] = point.points[0].histogram[i]; } vfh.first = path.string (); return (true); } /** \brief Search for the closest k neighbors搜索最近的K邻域 * \param index the tree 树 的索引 * \param model the query model //给定的模型 * \param k the number of neighbors to search for * \param indices the resultant neighbor indices * \param distances the resultant neighbor distances */ inline void nearestKSearch (flann::Index<flann::ChiSquareDistance<float> > &index, const vfh_model &model, int k, flann::Matrix<int> &indices, flann::Matrix<float> &distances) { // Query point 给定的点云 flann::Matrix<float> p = flann::Matrix<float>(new float[model.second.size ()], 1, model.second.size ()); memcpy (&p.ptr ()[0], &model.second[0], p.cols * p.rows * sizeof (float)); indices = flann::Matrix<int>(new int[k], 1, k); distances = flann::Matrix<float>(new float[k], 1, k); index.knnSearch (p, indices, distances, k, flann::SearchParams (512)); delete[] p.ptr (); } /** \brief Load the list of file model names from an ASCII file 载入模型文件名 * \param models the resultant list of model name * \param filename the input file name */ bool loadFileList (std::vector<vfh_model> &models, const std::string &filename) { ifstream fs; fs.open (filename.c_str ()); if (!fs.is_open () || fs.fail ()) return (false); std::string line; while (!fs.eof ()) { getline (fs, line); if (line.empty ()) continue; vfh_model m; m.first = line; models.push_back (m); } fs.close (); return (true); } int main (int argc, char** argv) { int k = 6; double thresh = DBL_MAX; // No threshold, disabled by default if (argc < 2) { pcl::console::print_error ("Need at least three parameters! Syntax is: %s <query_vfh_model.pcd> [options] {kdtree.idx} {training_data.h5} {training_data.list}\n", argv[0]); pcl::console::print_info (" where [options] are: -k = number of nearest neighbors to search for in the tree (default: "); pcl::console::print_value ("%d", k); pcl::console::print_info (")\n"); pcl::console::print_info (" -thresh = maximum distance threshold for a model to be considered VALID (default: "); pcl::console::print_value ("%f", thresh); pcl::console::print_info (")\n\n"); return (-1); } std::string extension (".pcd"); transform (extension.begin (), extension.end (), extension.begin (), (int(*)(int))tolower); // Load the test histogram 载入测试的直方图 std::vector<int> pcd_indices = pcl::console::parse_file_extension_argument (argc, argv, ".pcd"); vfh_model histogram; if (!loadHist (argv[pcd_indices.at (0)], histogram)) { pcl::console::print_error ("Cannot load test file %s\n", argv[pcd_indices.at (0)]); return (-1); } pcl::console::parse_argument (argc, argv, "-thresh", thresh); // Search for the k closest matches 设置K邻域的个数 pcl::console::parse_argument (argc, argv, "-k", k); pcl::console::print_highlight ("Using "); pcl::console::print_value ("%d", k); pcl::console::print_info (" nearest neighbors.\n"); std::string kdtree_idx_file_name = "kdtree.idx"; std::string training_data_h5_file_name = "training_data.h5"; std::string training_data_list_file_name = "training_data.list"; std::vector<vfh_model> models; flann::Matrix<int> k_indices; //索引 flann::Matrix<float> k_distances; //距离 flann::Matrix<float> data; // Check if the data has already been saved to disk if (!boost::filesystem::exists ("training_data.h5") || !boost::filesystem::exists ("training_data.list")) { pcl::console::print_error ("Could not find training data models files %s and %s!\n", training_data_h5_file_name.c_str (), training_data_list_file_name.c_str ()); return (-1); } else { loadFileList (models, training_data_list_file_name); //载入模型的文件名 flann::load_from_file (data, training_data_h5_file_name, "training_data"); pcl::console::print_highlight ("Training data found. Loaded %d VFH models from %s/%s.\n", (int)data.rows, training_data_h5_file_name.c_str (), training_data_list_file_name.c_str ()); } // Check if the tree index has already been saved to disk if (!boost::filesystem::exists (kdtree_idx_file_name)) { pcl::console::print_error ("Could not find kd-tree index in file %s!", kdtree_idx_file_name.c_str ()); return (-1); } else { flann::Index<flann::ChiSquareDistance<float> > index (data, flann::SavedIndexParams ("kdtree.idx")); index.buildIndex (); nearestKSearch (index, histogram, k, k_indices, k_distances); //搜索K邻域 } // Output the results on screen pcl::console::print_highlight ("The closest %d neighbors for %s are:\n", k, argv[pcd_indices[0]]); for (int i = 0; i < k; ++i) pcl::console::print_info (" %d - %s (%d) with a distance of: %f\n", i, models.at (k_indices[0][i]).first.c_str (), k_indices[0][i], k_distances[0][i]); // Load the results可视化结果 pcl::visualization::PCLVisualizer p (argc, argv, "VFH Cluster Classifier"); int y_s = (int)floor (sqrt ((double)k)); int x_s = y_s + (int)ceil ((k / (double)y_s) - y_s); double x_step = (double)(1 / (double)x_s); double y_step = (double)(1 / (double)y_s); pcl::console::print_highlight ("Preparing to load "); pcl::console::print_value ("%d", k); pcl::console::print_info (" files ("); pcl::console::print_value ("%d", x_s); pcl::console::print_info ("x"); pcl::console::print_value ("%d", y_s); pcl::console::print_info (" / "); pcl::console::print_value ("%f", x_step); pcl::console::print_info ("x"); pcl::console::print_value ("%f", y_step); pcl::console::print_info (")\n"); int viewport = 0, l = 0, m = 0; for (int i = 0; i < k; ++i) { std::string cloud_name = models.at (k_indices[0][i]).first; boost::replace_last (cloud_name, "_vfh", ""); p.createViewPort (l * x_step, m * y_step, (l + 1) * x_step, (m + 1) * y_step, viewport); l++; if (l >= x_s) { l = 0; m++; } pcl::PCLPointCloud2 cloud; pcl::console::print_highlight (stderr, "Loading "); pcl::console::print_value (stderr, "%s ", cloud_name.c_str ()); if (pcl::io::loadPCDFile (cloud_name, cloud) == -1) break; // Convert from blob to PointCloud pcl::PointCloud<pcl::PointXYZ> cloud_xyz; pcl::fromPCLPointCloud2 (cloud, cloud_xyz); if (cloud_xyz.points.size () == 0) break; pcl::console::print_info ("[done, "); pcl::console::print_value ("%d", (int)cloud_xyz.points.size ()); pcl::console::print_info (" points]\n"); pcl::console::print_info ("Available dimensions: "); pcl::console::print_value ("%s\n", pcl::getFieldsList (cloud).c_str ()); // Demean the cloud Eigen::Vector4f centroid; pcl::compute3DCentroid (cloud_xyz, centroid);//Compute the 3D (X-Y-Z) centroid of a set of points and return it as a 3D vector. pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_xyz_demean (new pcl::PointCloud<pcl::PointXYZ>); pcl::demeanPointCloud<pcl::PointXYZ> (cloud_xyz, centroid, *cloud_xyz_demean); // Add to renderer* p.addPointCloud (cloud_xyz_demean, cloud_name, viewport); // Check if the model found is within our inlier tolerance std::stringstream ss; ss << k_distances[0][i]; if (k_distances[0][i] > thresh) { p.addText (ss.str (), 20, 30, 1, 0, 0, ss.str (), viewport); // display the text with red // Create a red line pcl::PointXYZ min_p, max_p; pcl::getMinMax3D (*cloud_xyz_demean, min_p, max_p); std::stringstream line_name; line_name << "line_" << i; p.addLine (min_p, max_p, 1, 0, 0, line_name.str (), viewport); p.setShapeRenderingProperties (pcl::visualization::PCL_VISUALIZER_LINE_WIDTH, 5, line_name.str (), viewport); } else p.addText (ss.str (), 20, 30, 0, 1, 0, ss.str (), viewport); // Increase the font size for the score* p.setShapeRenderingProperties (pcl::visualization::PCL_VISUALIZER_FONT_SIZE, 18, ss.str (), viewport); // Add the cluster name p.addText (cloud_name, 20, 10, cloud_name, viewport); } // Add coordianate systems to all viewports p.addCoordinateSystem (0.1, "global", 0); p.spin (); return (0); }
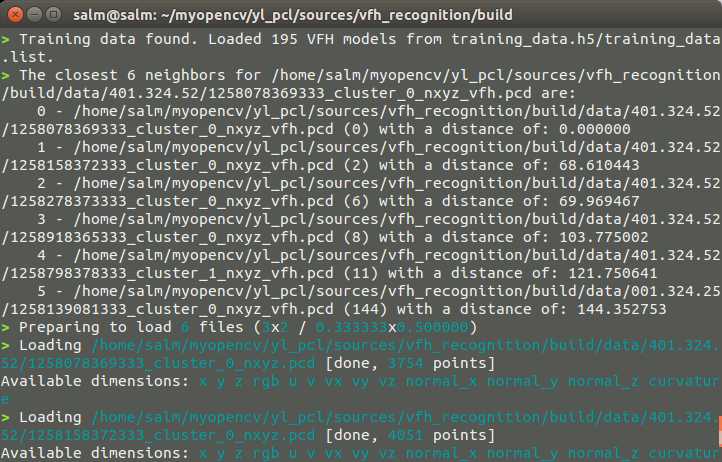
这里面就涉及到FLANN的库的函数的使用,执行的结果
打印的结果,这里面会显示最接近的六个数据集,并且计算这六个最近点云与给定点云之间的“距离”,这也是衡量两者之间的相似度的大小
可视化的结果
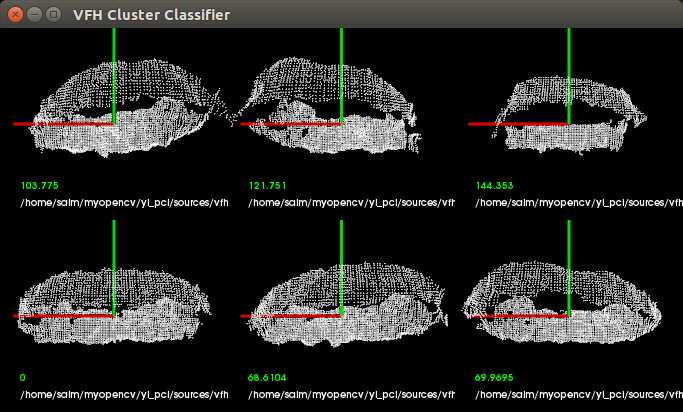
很明显左下角就是我们给定的数据点云,而且运行查找的速度非常快~
好了就这样了
关注微信公众号,欢迎大家的无私分享
