actionlib是ROS中一个很重要的功能包集合,尽管在ROS中已经提供了srevice机制来满足请求—响应式的使用场景,但是假如某个请求执行时间很长,在此期间用户想查看执行的进度或者取消这个请求的话,service机制就不能满足了,但是actionlib可满足用户这种需求。例如,控制机器人运动到地图中某一目标位置,这个过程可能复杂而漫长,执行过程中还可能强制中断或反馈信息,这时actionlib就能大展伸手了。
actionlib使用client-server工作模式,ActionClient 和ActionServer通过"ROS Action Protocol"进行通信,"ROS Action Protocol"以ROS消息方式进行传输。此外ActionClient 和ActionServer给用户提供了一些简单的接口,用户使用这些接口可以完成goal请求(client-side)和goal执行(server-side)。
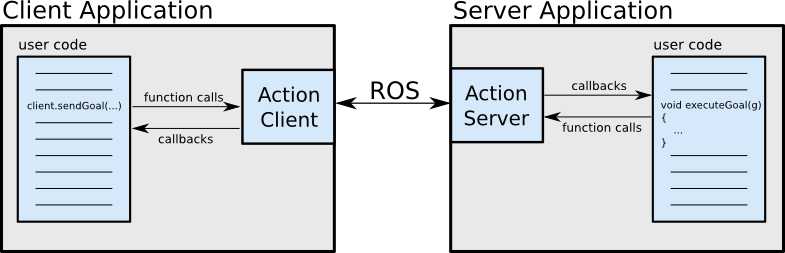
ActionClient 和ActionServer之间使用action protocol通信,action protocol就是预定义的一组ROS message,这些message被放到ROS topic上在 ActionClient 和ActionServer之间进行传实现二者的沟通。
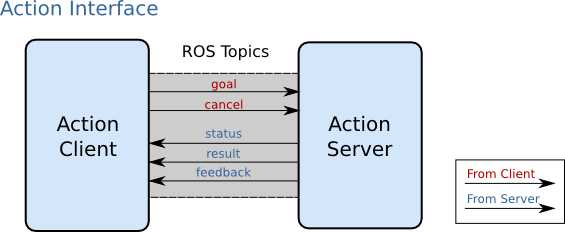
ROS Messages:
-
goal - Used to send new goals to servers. 代表一个任务,可以被ActionClient发送到ActionServer。比如在MoveBase中,它的类型是PoseStamped,包含了机器人运动目标位置的信息。
-
cancel - Used to send cancel requests to servers
-
status - Used to notify clients on the current state of every goal in the system
-
feedback - Used to send clients periodic auxiliary information for a goal. 服务端定期告知Client当前Goal执行过程中的情况。在Move Base案例中,它表示机器人当前姿态。
-
result - Used to send clients one-time auxiliary information upon completion of a goal
ROS系统在action文件(文件名后缀为.action)中定义了上述goal、result、feedback等消息。The .action file has the goal definition, followed by the result definition, followed by the feedback definition, with each section separated by 3 hyphens (---).
下面是一个示意的例子,在./action/DoDishes.action文件中对洗碗这一任务进行定义:goal为使用某一洗碗机洗碗,result为总共洗好的碗数目,feedback为洗碗进度。
# Define the goal uint32 dishwasher_id # Specify which dishwasher we want to use --- # Define the result uint32 total_dishes_cleaned --- # Define a feedback message float32 percent_complete
下面在catkin_ws/src目录下创建一个测试package:
catkin_create_pkg actionlib_test roscpp std_msgs actionlib actionlib_msgs message_generation rospy
在package的CMakeLists.txt文件中加入下面这几行:
#find_package(catkin REQUIRED genmsg actionlib_msgs actionlib) add_action_files(DIRECTORY action FILES DoDishes.action) generate_messages(DEPENDENCIES actionlib_msgs)
注意如果使用catkin_create_pkg创建包时没有添加actionlib相关的依赖项,要将上面CMakeLists中第一行的注释去掉,另外还要在package.xml文件中加入下面几行。因为我们在创建包时就添加好了相关依赖,所以这一步骤可以省略。
<build_depend>actionlib</build_depend> <build_depend>actionlib_msgs</build_depend> <run_depend>actionlib</run_depend> <run_depend>actionlib_msgs</run_depend>
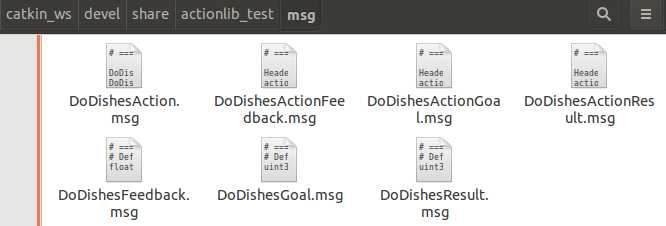
使用catkin_make编译即可查看生成的消息文件,这些消息之后将会用于ActionClient 和 ActionServer间的通信。
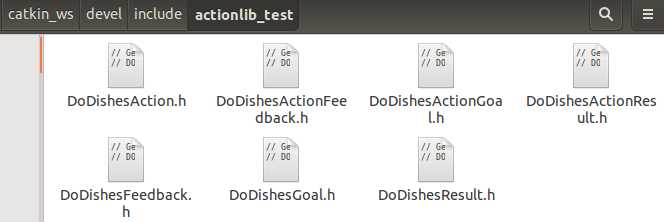
另外可以看到,在devel/include/actionlib_test/中生成了相关的头文件:
C++ SimpleActionClient
client示例代码client.cpp如下,它会等待Server连接,发送Goal,获取状态。SimpleActionClient完整的API可以参考C++ SimpleActionClient
#include <actionlib_test/DoDishesAction.h> #include <actionlib/client/simple_action_client.h> typedef actionlib::SimpleActionClient<actionlib_test::DoDishesAction> Client; int main(int argc, char** argv) { ros::init(argc, argv, "do_dishes_client"); Client client("do_dishes", true); // true -> don‘t need ros::spin() client.waitForServer(); // Waits for the ActionServer to connect to this client actionlib_test::DoDishesGoal goal; // Fill in goal here client.sendGoal(goal); // Sends a goal to the ActionServer client.waitForResult(ros::Duration(5.0)); // Blocks until this goal finishes if (client.getState() == actionlib::SimpleClientGoalState::SUCCEEDED) printf("Yay! The dishes are now clean\n"); printf("Current State: %s\n", client.getState().toString().c_str()); return 0; }
C++ SimpleActionServer
服务端代码server.cpp如下,SimpleActionServert完整的API可以参考 C++ SimpleActionServer
#include <actionlib_test/DoDishesAction.h> #include <actionlib/server/simple_action_server.h> typedef actionlib::SimpleActionServer<actionlib_test::DoDishesAction> Server; void execute(const actionlib_test::DoDishesGoalConstPtr& goal, Server* as) { // Do lots of awesome groundbreaking robot stuff here as->setSucceeded(); } int main(int argc, char** argv) { ros::init(argc, argv, "do_dishes_server"); ros::NodeHandle n; Server server(n, "do_dishes", boost::bind(&execute, _1, &server), false); server.start(); ros::spin(); return 0; }
在CMakeLists文件中加入下面这几行:
add_executable(client src/client.cpp)
add_executable(server src/server.cpp)
target_link_libraries( client ${catkin_LIBRARIES})
target_link_libraries( server ${catkin_LIBRARIES})
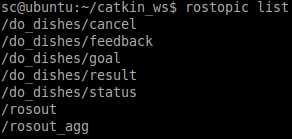
使用catkin_make进行编译完成后输入指令rosrun actionlib_test server 运行server,通过rostopic list查看系统中的话题如下:
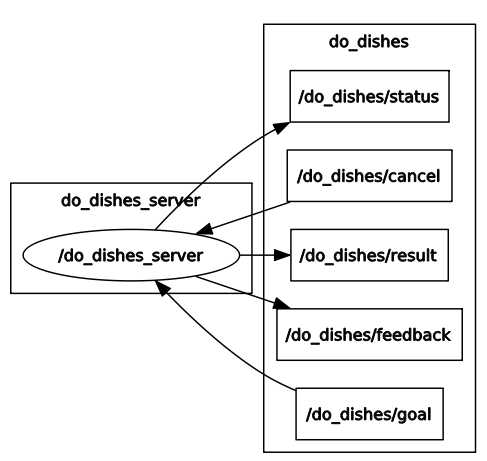
使用rqt_graph命令可以查看节点和消息的关系,可以看出server端会接收goal和cancel消息,并发出status、result、feedback消息:
接着输入指令rosrun actionlib_test client 运行client,结果如下图所示:

Python SimpleActionClient
除了C++也可以使用Python实现同样的功能,client.py如下(API可以参考Python SimpleActionClient):
#! /usr/bin/env python import roslib roslib.load_manifest(‘actionlib_test‘) import rospy import actionlib from actionlib_test.msg import DoDishesAction, DoDishesGoal if __name__ == ‘__main__‘: rospy.init_node(‘do_dishes_client‘) client = actionlib.SimpleActionClient(‘do_dishes‘, DoDishesAction) client.wait_for_server() goal = DoDishesGoal() # Fill in the goal here client.send_goal(goal) client.wait_for_result(rospy.Duration.from_sec(5.0))
Python SimpleActionServer
server.py程序如下(API可参考Python SimpleActionServer):
#! /usr/bin/env python import roslib roslib.load_manifest(‘actionlib_test‘) import rospy import actionlib from actionlib_test.msg import DoDishesAction class DoDishesServer: def __init__(self): self.server = actionlib.SimpleActionServer(‘do_dishes‘, DoDishesAction, self.execute, False) self.server.start() def execute(self, goal): # Do lots of awesome groundbreaking robot stuff here self.server.set_succeeded() if __name__ == ‘__main__‘: rospy.init_node(‘do_dishes_server‘) server = DoDishesServer() rospy.spin()
注意在运行程序前先用chmod +x命令给Python文件添加可执行权限:

运行client.py和server.py,注意client.py运行就会返回:

参考: