S5PV210 UART 相关说明
通用异步收发器简称 UART, 即 UNIVERSAL ASYNCHRONOUS RECEIVER AND TRANSMITTER,它用来传输串行数据。发送数据时, CPU 将并行数据写入 UART,UART 按照一定的格式在一根电线上串行发出;接收数据时, UART 检测另一根电线的信号,将串行收集在缓冲区中, CPU 即可读取 UART 获得这些数据。
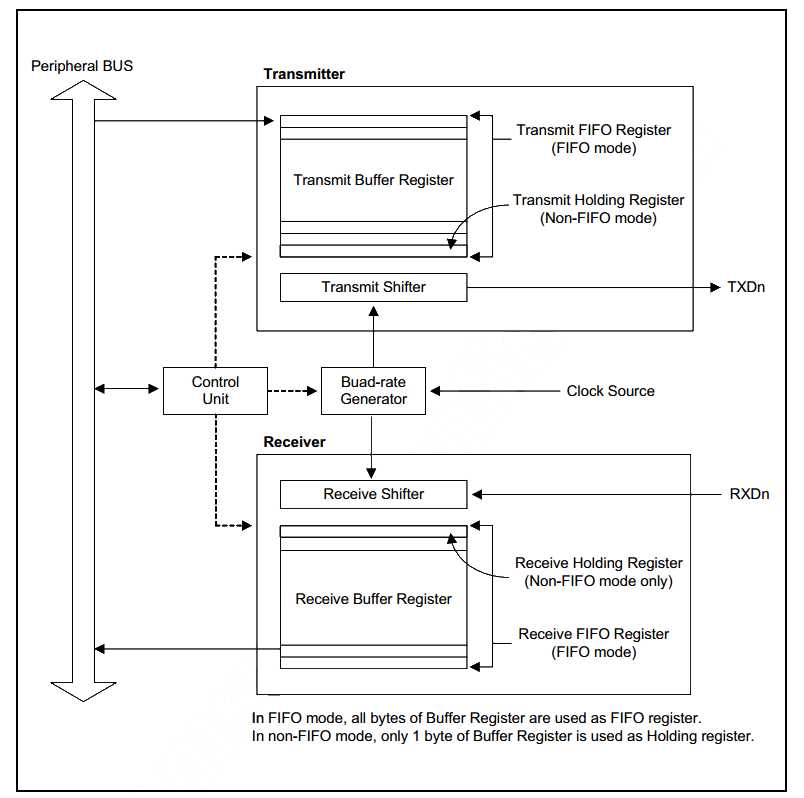
在 S5PV210 中, UART 提供了 4 对独立的异步串口 I/O 端口,有 4 个独立的通道,每个通道可以工作于 DMA 模式或者中断模式。其中,通道 0 有 256byte 的的发送 FIFO 和 256byte 的接收 FIFO,通道 1 有 64byte 的的发送 FIFO 64byte 的接收 FIFO,而通道 2 和 3 只有 16byte 的的发送 FIFO 和 16byte 的接收 FIFO。
S5PV210 的 UART 结构图如下:
串口初始化程序
void uart_init()
{
/* 1 配置引脚用于 RX0/TX0 功能 */
GPA0CON = 0x22;
/* 2 设置数据格式等 */
UFCON0 = 0x1; // 使能 FIFO
UMCON0 = 0x0; // 无流控
ULCON0 = 0x3; // 数据位:8, 无校验, 停止位: 1
UCON0 = 0x5; // 时钟: PCLK,禁止中断,使能 UART 发送、接收
/* 3 设置波特率 */
UBRDIV0 = UART_UBRDIV_VAL; // 34
UDIVSLOT0 = UART_UDIVSLOT_VAL; // 13
}程序分析:
第一步 配置引脚用于 RX0/TX0 功能
GPA0CON 寄存器如下图所示:
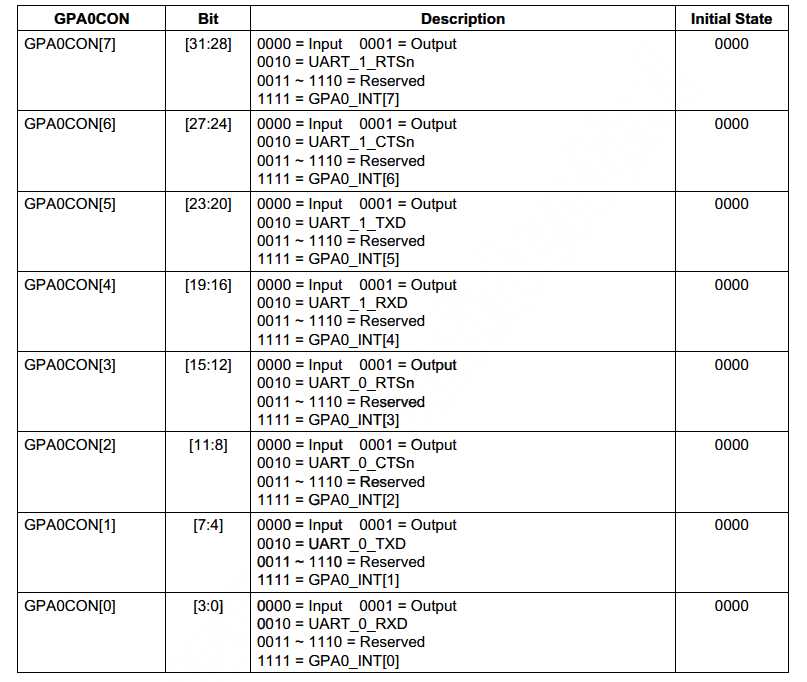
配置 GPA0CON = 0x22。
第二步 设置数据格式
ULCON0 寄存器如下图所示:
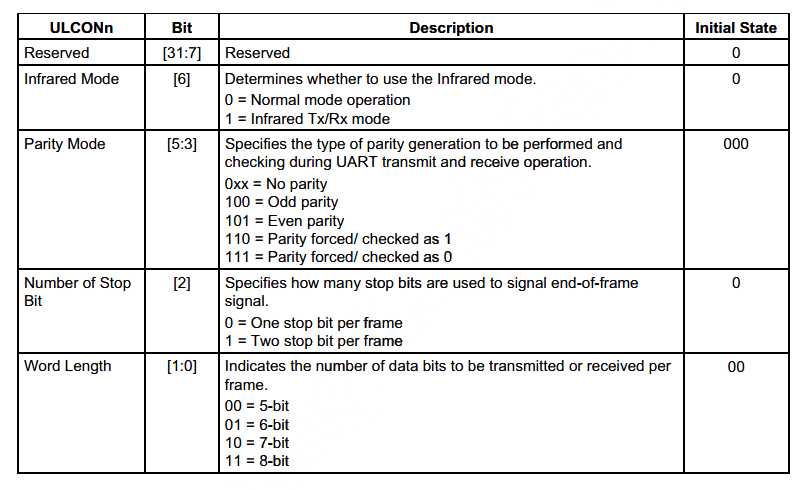
Word Length = 11,8bit 的数据;
Number of Stop Bit = 0,1bit 的停止位;
Parity Mode = 000,无校验;
Infrared Mode =0,使用普通模式;
所以 ULCON0 = 0x3。第三步 配置 UART
UCON0 寄存器如下图所示:
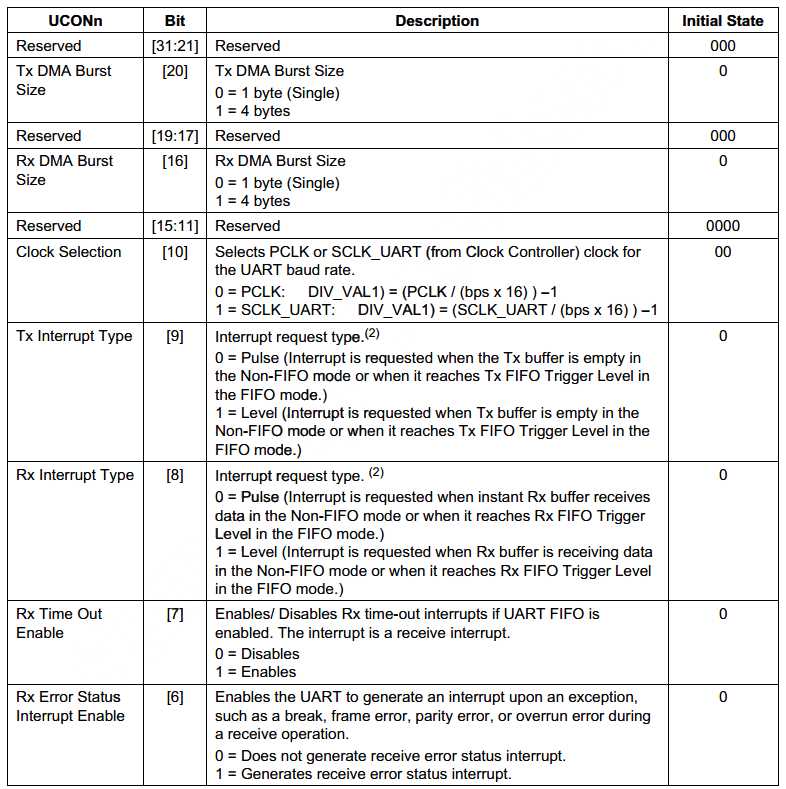
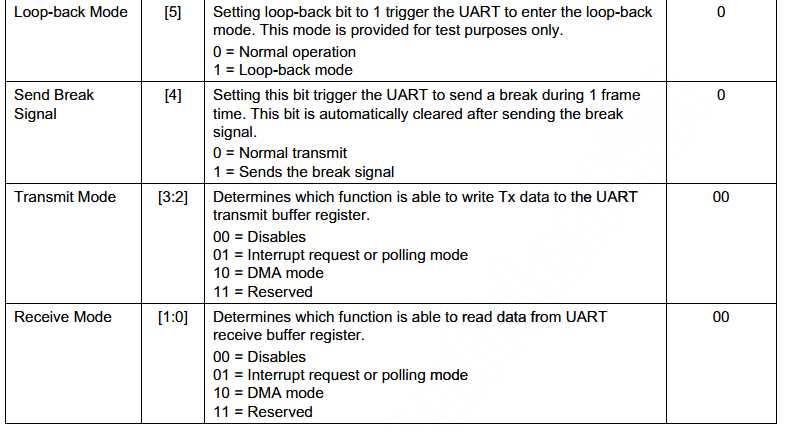
Receive Mode = 01 ,使用中断模式或者轮询模式;
Transmit Mode = 01,使用中断模式或者轮询模式;
Send Break Signal = 0,普通传输;
Loop-back Mode = 0,不使用回环方式;
我们采用轮询的方式接受和发送数据,不使用中断,所以 bit[6-9]均为 0;
Clock Selection = 0,使用 PCLK 作为 UART 的工作时钟;
我们不使用 DMA,所以 bit[16]和 bit[20]均为 0;
所以 UCON0 = 0x5。第四步 UFCON0 和 UMCON0
这两个寄存器比较简单, UFCON0 用来使能 FIFO, UMCON0 用来设置无流控。
第五步 设置波特率
主要是配置如下两个寄存器:
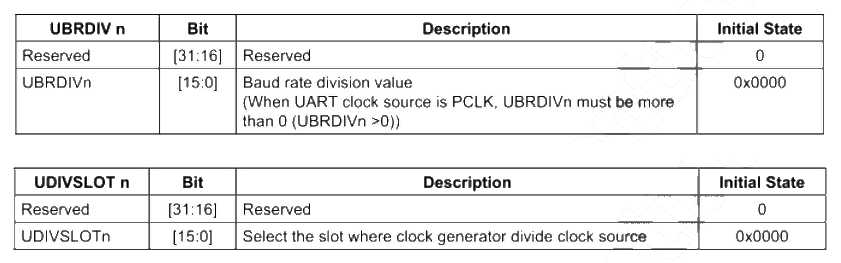
波特率设置相关公式:
UBRDIVn + (UDIVSLOTn)/16 = (PCLK / (bps x 16)) ?1UART 工作于 PSYS 下,所以 PCLK 即 PCLK_PSYS = 66MHz,我们的波特率 bps 设置为 115200,所以
(66MHz/(115200 x 16)) – 1 = 34.80 = UBRDIVn + (UDIVSLOTn)/16所以,设置 UBRDIV0 = 34,UDIVSLOT0 = 13。
轮询方式接收和发送一个字符
/* 接收一个字符 */
char getc(void)
{
while ((UFSTAT0 & 0xff) == 0); // 如果 RX FIFO 空,等待
return URXH0; // 取数据
}
/* 发送一个字符 */
void putc(char c)
{
while (UFSTAT0 & (1<<24)); // 如果 TX FIFO 满,等待
UTXH0 = c; // 写数据
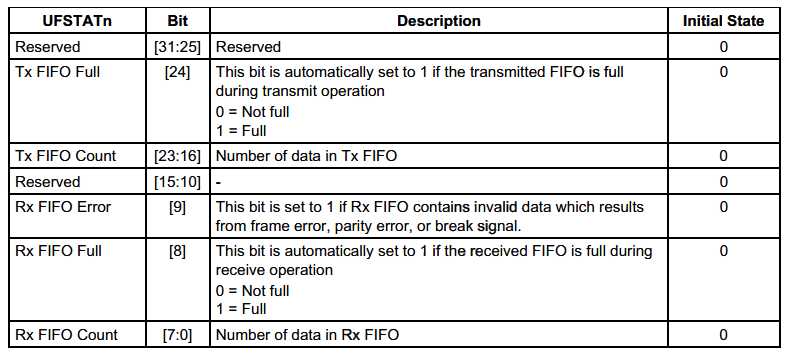
}通过读 UFSTAT0 发送/接收状态寄存器,当 Rx FIFO Count 不为 0 时说明接收到数据,读 URXH0 寄存器可以得到 8bit 的数据; 当 Tx FIFO Full = 0 时说明可以发送数据,写 8bit 的数据到 UTXH0。
UFSTAT0 寄存器如下图所示:
所做修改
在《友善之臂210手册》中,讲解的是通过 UTRSTAT0 这个 buffer state reg 来查看当前的状态,因为我们采用的 FIFO模式,并且 UTRSTAT0 与程序所用 Reg 也不符,所以手册中显然是错误的,我们写的分析是修改过的。(可能我参考的手册并不是友善之臂的最新版,没有检察出有此处小错误)
本篇文章参考:《友善之臂210手册》