标签:des blog http io os 使用 java ar strong
[host] 表示主机PC机Linux
[target] 表示目标板Linux
检查Linux是否安装了TFTP服务
[host]$ rpm -qa|grep tftp tftp-0.32-4 tftp-server-0.32-4
否则从Linux安装盘重新用rpm安装tftp相关模块,并打开tftp的服务.
NFS是一种在网络上的机器间共享文件的方法,文件就如同位于客户的本地硬盘驱动器上一样.可以将之看成是一种文件系统的格式,Red Hat Linux既可以是NFS服务器也可以是NFS客户,这意味着它可以把文件系统导出给其他系统,也可以挂载从其他机器上导入的文件系统.DVEVM的NFS主要用来把主机Linux上的MV Linux映射到DVEVM板上去,使得DVEVM在自身无文件系统的情形下,可以正常的执行各种任务.
配Linux主机和DVEVM的IP.比较简单.
是操作系统内核运行前运行的一段程序,通过这段程序来初始化硬件设备、建立内存空间的映射表,从而将系统的软硬件环境初始化,以便为最终调用操作系统内核准备正确的环境,烧写前准备如下软硬件设施.
软件部分:
硬件部分:
准备好上述软硬环境后,即可以开始烧写了,烧写例程见附录(U-boot example.rar),烧写过程很简单,类似emulation.
[target]#setenv bootargs console=ttyS0,115200n8 noinitrd rw ip=......
详细参数说明见U-BOOT说明文档.
至此,我们ARM端的初步开发环境建立起来了,可以做一些比较简单的开发程序,如例:

[host]$mkdir ~/workdir/filesys/ opt /hello
[host]$cd ~/workdir/filesys/ opt /hello
[host]$vi hello.c
#include<stdio.h>
int main() {
printf("hello world! welcome to DAVINCI test");
return 0; }
[host]$arm_v5t_le-gcc hello.c -o hello /*保存后,用交叉编译工具arm_v5t_le-gcc编译程序:*/
这里假设已经将PC机linux中~/workdir/filesys/目录通过nfs挂载为目标板文件系统了.
[target]#cd /opt/hello /*编译生成二进制文件hello后,启动DAVINCI DVEVM板,通过超级终端运行下命令*/ [target]#./hello
在一中只是建立了DVEVM的开发环境,只能进行ARM端程序的开发,如果需要开发DSP端的算法就还需要安装使用DVSDK,该软件包包括如下内容:
有了以上DVSDK相关套件,就可以构建DSP端的相关开发组建,其中Codec Engine Romote Server运行在DSP/BIOS上,而在RS中封装了相关算法,在算法的封装中要用到一些xDAIS的框架组件.DSP和GPP之间的通讯由DSP/BIOS Link来完成.
安装:linux下的操作,比较简单,只是要注意DVSDK的版本必须与DVEVM版本号一致.且最好把相关的DVSDK安装在dvevm_#_#_#下.
配置:在dvevm_#_#_#目录下的Rules.make文件控制了大部分的编译行为,该文件被dvevm_#_#_#目录及其一些子目录下的Makefile文件所包含,对DSP端应用程序的编译需要修改相应的文件,具体根据你实际DVSDK软件包的安装路径.里面要求指定DVEVM、CE、XDAIS、DSP LINK、CMEM、codec server、RTSC、FC、DSP/BIOS、linux kernel等等包的路径.
数字视频测试平台(DVTB)是不用C代码而直接利用一些脚本语言来测试DSP端算法的工具.在DVSDK安装后,会在dvevm_#_#_#目录下有个dvtb的目录,就在此执行安装,然后到DSP的可执行目录下去运行(DSP的可执行目录下必须要有cmemk.ko, dsplink.ko等文件),如/nfshost/mydemos.
DVTB的命令语法如下:<Command> <class> <options>
通过DVTB命令,可以控制audio/vpbe/bpfe等外设或各音视频编解码器,来完成一些测试工作.具体安装过程和命令使用方法可以参考:\opt\dvevm_#_#_#\dvtb_#_#\目录下文档.暂时还没有用到.
XDC是用来编译和打包的工具,能够创建实时软件组件包RTSC(Real Time Software Component).与其他编译工具一样,它能根据源文件和库文件编译生成可执行文件.不同的是它能够自动的进行性能优化和版本控制.XDC还能够根据所提供的配置脚本语言产生代码,这一特性在编译如编解码器、服务器和引擎等可执行程序时尤为重要.
XDC的调用语法格式:XDC <target files> <XDCPATH> <XDCBUILDCFG>
target files:指编译产生的目标文件.可以通过命令脚本来指定要产生哪些目标文件;
XDCPTH: 编译时所要查找的目录;
XDCBUILDCFG:由"config.bld"文件指定,包含了与平台有关的编译指令.后面细说.
以上命令模式可能在参数过多是很复杂,通常把它写成shell脚本来运行.
与XDC相关的三个配置文件:
package.xdc:主要包含与包package有关的信息:依赖信息、模块信息、版本信息.由自己提供.
package.bld:主要作用是定义一个包应该如何被编译.文件内容用Javascript来描述.其中包含目标平台集的定义[MVArm9,Linux86]、编译版本的定义[release]、确定源文件集、生成的可执行文件信息等等.
这两个文件都是在server目录下,可见每个codec都有自己的package信息描述文件,然后XDC根据再依之生成一个package包.
config.bld:这个文件处在codec_engine_##目录下,为各个codec所共有,它主要定义了与平台有关的特性,包含如下几部分:DSP Target、Arm Target、Linux Host Target、Build Targets、Pkg.attrs.Profile、Pkg.lib等具体信息.通常都是基于TI提供的模板对这三个配置文件做修改.
DaVinci是DSP和ARM双核架构的SOC芯片.对芯片与外界的交互通过ARM端的Montavista Linux和相关驱动与应用程序来管理,DSP端只处理编解码相关的算法.DSP和ARM之间的通讯和交互是通过引擎(Engine)和服务器(Server)来完成的.本节只讲述编解码引擎CE.
从应用来说,CE就是用来调用xDAIS算法的一组API的集合,用户可以通过这些API来实例化和调用xDAIS算法.达芬奇提供了一组VISA接口,用于给应用程序与xDM兼容的xDAIS算法相交互.需要注意,不管算法是运行在本地(ARM端),还是远端(DSP端),也不管硬件体系是只有ARM或是只有DSP或两者都有,也不管OS是Linux、VxWorks、DSP/BIOS,还是WinCE,对算法的接口调用都是一致的.这点通过引擎的配置文件*.cfg可以看出来,而且通过配置文件可以决定自己的codec是运行在ARM端还是DSP端.
CE包括核心引擎API和VISA API,核心引擎API相关接口模块为:初始化模块(CERuntime_)、CE运行时模块(Engine_)、抽象层内存模块(Memory_); VISA API的接口模块我们常用的有:视频编码接口(VIDENCx_)、视频解码接口(VIDDECx_)、音频编码接口(AUDENCx_)、音频解码接口(AUDDECx_),各模块分别包含在对应的头文件中.
应用程序必须使用CE的核心引擎的三个相关模块去打开和关闭编解码引擎的实例. 需要注意的是引擎的句柄是非线程保护的,对单独使用CE的每个线程来说,必须执行Engine_open并管理好自己的引擎句柄,而对多线程应用来说,也可以顺序的访问一个共享的引擎实例,我们目前采用的就是后者,只定义了一个引擎句柄,多个解码器共用.编解码引擎同时还提供相关的API用以访问系统的内存使用状况和CPU的负载信息,接口如下:
目前我们都是多个解码器共用一个引擎句柄,比如:
static String engineName = "videodec"; /*定义引擎名字,ceapp.cfg配置文件中会用到*/ Engine_Handle ceHandle_264 = NULL; /*创建一个264解码器引擎句柄*/ Engine_Error errorcode; /*用于返回引擎打开的状况信息,不同返回值代表的意义可参考相应头文件*/ ceHandle_264 = Engine_open(engineName, NULL, &errorcode);
根据上述理解,我觉得如果多个线程需要单独使用自己的引擎时,应该可以定义多个引擎名字,创建多个引擎句柄,此时每个线程必须单独执行Engine_open(),并管理好自己的引擎句柄.
创建一个算法实例:*_create()
编解码引擎ceHandle_264创建完毕后,可以通过它来创建自己的算法实例,需要调用*_create(),其中*可以是VIDEO或AUDIO的相应编解码模块的名字,例如:
static String decoderName = "h264dec";/*定义解码模块名字,用于标识算法名字,ceapp.cfg会用到*/ VIDDEC_Handle 264Handle; /*创建解码器句柄*/ 264Handle = VIDDEC_create(ceHandle_264, decoderName, NULL); /*在引擎上分配和初始化解码器,第三个参数可以用来初始化算法的相关参数,这些参数控制着算法的各种行为,参数结构依VISA中编码或解码器的不同而不同,具体结构内容可参考头文件*/
关闭一个算法实例:*_delete()
VIDDEC_delete(264Handle); /*注意:只有当与算法相关的内存片清除后,才可以调用之删除算法实例*/
控制一个算法实例:*_control()
VIDDEC_control(264Handle, XDM_SETPARAME, dynamicParamsPtr, &encStatus);
第一个参数是已经打开的算法实例句柄; 第二个参数是一整型的command id,它定义在xdm.h中; 第三个参数是需要动态改变算法的参数,比如在create中第三个参数已经为解码器初始化了一些参数,在这里可以对之做修改,但修改有条件,其具体结构内容可以参考头文件; 第四个参数是一个结构体变量,不同模块具有不同的结构,具体参考头文件.
通过算法实例处理数据:*_process()
status = VIDDEC_process(264Handle &inBufDesc,&outBufDesc, &inArgs, &outArgs);
第二和第三个参数是XDM_BufDesc类型的结构体,其中包含了内存片段的数目和开始地址以及长度信息;第四第五个参数分别为算法实例提供输入和输出地址.
上述所有结构体都可以在:\opt\dvevm_#_#\xdais_#_#\packages\xdais\dm下面找到,并可以做修改.只是现在还不知道这些结构体具体怎么使用.
引擎的配置文件是以*.cfg文件形式存储的,目前我们工程里面含两个*.cfg:app里面含ceapp.cfg,里面包含对引擎的配置,还有一个是video_copy.cfg,在server下,是对服务器的配置文件之一,后面会讲到.ceapp.cfg通过Makefile文件使用package.xdc来产生一个*.c文件和一个链接命令脚本文件.一个引擎配置文件包含如下内容:引擎的名字以及包含在引擎内的编解码器和它们的名字.从这里可以看出,前面定义"h264dec"等名字的作用,用于应用程序中标识算法类别,也可以看出一个引擎是可以由几个编解码器模块共用的.我们以ceapp.cfg文件的内容为例说明配置参数的含义:
/*--------------set up OSAL----------------*/ var osalGlobal = xdc.useModule(‘ti.sdo.ce.osal.Global‘); osalGlobal.runtimeEnv = osalGlobal.DSPLINK_LINUX;
注:这两句是设置全局的模块使配置脚本生效,然后是设置引擎的运行环境,即需要用的DSP/BIOS Link和Linux OS).
/*--------------get codec modules;i.e.implementation of codecs-------*/ var H264DEC = xdc.useModule(‘codecs.h264dec.H264DEC‘);
注:设置需要用到的编解码器,即我们将要用到给定目录下的H264DEC.注意我们目前使用的都是codec目录下ti提供的videnc_copy,实际上我们可以修改的,另前面我们定义解码器的名字时用的小写的‘h264dec‘,这里配置改成大写.
/*---------------Engine Cofiguation---------------*/
var Engine = xdc.useModule(‘ti.sdo.ce.Engine‘);
var demoEngine = Engine.create("videodec", [
{name:"h264dec", mod:H264DEC, local:false},
/* {name:"h264enc", mod:H264ENC, local:false} ... 如果有的话*/
]);
注:首先使ti.sdo.ce目录下的引擎可用,然后用create()创建一个引擎.每个引擎都有一个名字,这个名字会被开发人员用到(如打开引擎的时候,前面我们定义的引擎名字是"h264dec").create()的参数是一关于算法描述的数组,每个算法描述包含下面几个字段:
name:算法实例的名字,在标识算法时要用到,VIDEC_creat()等VISA API的参数,如前面定义264解码器名字"h264dec";
mod:用来标识实际的算法实现模块,通常就是name的大写,如H264DEC.
local:如果为真,算法实例在ARM端实现,否则通过codec server来创建DSP端的算法实例.
demoEngine.server = "./encodeCombo.x64P";
注:用于指明Codec Server.
编解码服务器(CS)就是一个二进制文件,它集成了编解码器,框架组件和一些系统代码,当CS运行在DSP上时,它使用了DSP/BIOS作为其内核.CS同时包括了对客户请求的相关DSP/BIOS线程.CS可以代表实际的DSP硬件、导入到DSP上的镜像文件以及正在运行的任务,其配置需要两个步骤:
通过TCF脚本语言配置DSP/BIOS;
通过XDC配置剩下的组件,比如:FC组件、DSP/BIOS Link、Codec Engine等.配置完成的服务器镜像文件是在引擎配置文件(ceapp.cfg)中使用的,如前所述的demoEngine.server = "./encodeCombo.x64P";
编译一个编解码服务器
CS镜像文件的创建过程是通过前面介绍的XDC工具来完成的,所不同的是,CS在创建时需要一个main.c和相关的BIOS配置脚本.tcf文件.
XDC相关文件:
/*--------------声明包名-----------------*/
package server{}
(我们目前的.xdc是:package server.video.copy, 此即\server\video_copy\..xdc,应该无需改动)
声明所必须包含的包,链接命令脚本,tcf文件和一些源文件,定义编译属性、平台和对象等.
/*第一部分:声明运行环境和各种编解码模块, 与CE.cfg类似*/
/*--------------set up OSAL----------------*/
var osalGlobal = xdc.useModule(‘ti.sdo.ce.osal.Global‘);
osalGlobal.runtimeEnv = osalGlobal.DSPLINK_BIOS;
注:这两句是设置全局的模块使配置脚本生效,然后是设置引擎的运行环境,即需要用的DSP/BIOS Link,与CE.cfg有点区别).
/*---------------server Cofiguation---------------*/
var Server = xdc.useModule(‘tisdo.ce.Server‘);
Server.threadAttrs.stackSize = 16384;
Server.threadAttrs.priority = Server.MINPRI;
/*--------------get codec modules;i.e.implementation of codecs-------*/
var H264DEC = xdc.useModule(‘codecs.h264dec.H264DEC‘); //与CE.cfg同,注意H264DEC标识的使用.
Server.algs = [
{name:"h264dec", mod:H264DEC,threadAttrs:{stackSize:4096,stackMemId:0,priority:Server.MINPRI+1} }, {...if have..},
];
/*第二部分:DSKT2 and DMAN3的配置:XDAIS算法内存和DMA的分配,参考配置文件*/
主要是DDR的划分和tcf与DSPLINK的内存配置一致性问题,以及dsplink.ko的编译问题,这些我都已经编译过多次,基本没什么差异.需要注意的一点是,DAVINCI的DSP端是没有虚拟地址管理的,所有的程序直接操作平面地址空间.具体操作方式DAVINCI开发原理之四中有详细例子说明.
编解码引擎CE和服务器CS之间的关系可以比作客户机和应用服务器之间的关系,本质上是远过程调用思想在双核上的实现.
远过程调用最初是用在C/S架构上进行互操作的一种机制,是OS中进程间通讯在网络环境中的延伸.其目的是使得应用程序在调用另一个远程应用程序(在另外一个节点上,或本节点上的另一个进程中)时,采用与本地调用相同的调用方式,就像本地进行的调用过程一样,如下图所示:
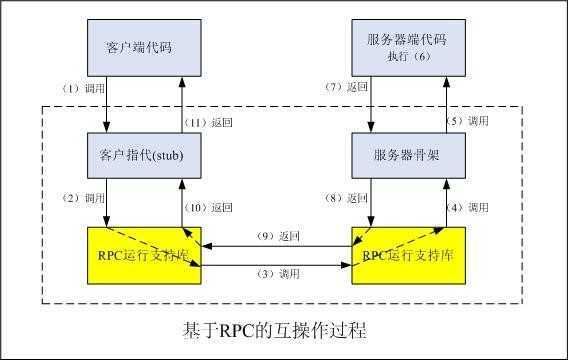
其过程如下:
从上过程分析可见,RPC过程中客户指代的主要工作包括:
对应服务器骨架也包含上述类似的功能.
在ARM端,对视频类程序来说,应用程序首先把采集到的原始图像信号,通过VISA接口调用相关的Codec存根函数,由存根函数调用相关的Engine API函数,也就是SPI(service provider interface)接口,但由于实际的Codec算法在远端(DSP端),所以必须由引擎把信号进行封装,通过OS抽象层与DSP Link通讯把打包后的数据发送出去,如下图所示:
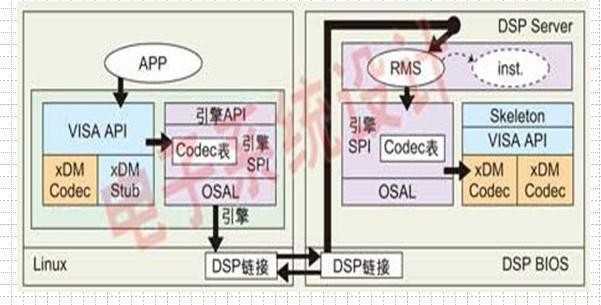
数据进入DSP端后,服务器上的算法实例(codec)接收到相关的数据信息,但这时的信息是被封装过的,必须由服务器骨架对数据进行解析,从中获得调用者的VISA接口参数,然后调用相关的xDM Codec实例,数据的返回方法与之相逆.在这个过程中,ARM端看做客户机,DSP端看做服务器,把server看做服务区骨架,codec看做服务区上的应用程序.
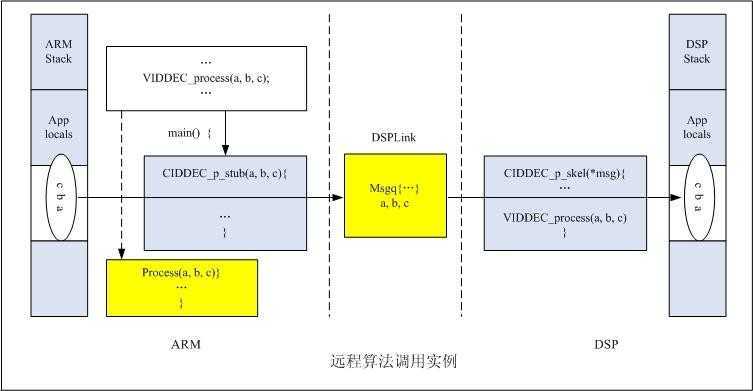
这里分析一个实际的调用代码的过程. 在视频类程序中,一般是通过像VIDDEC_process(a,b,c)这样的VISA接口函数来调用远端算法的.对内部的工作细节是:首先在应用程序(ARM端app.c)中调用VIDDEC_process(a,b,c)[ceapp_decodeBuf()调用VIDDEC_process(),这个调用只是客户端发送个接口信号],这里首先是调用引擎上的Engine API,也就是服务提供者接口(SPI)VIDDEC_p_process(a,b,c),从这可以看出在app.c中要有一次CERuntime_init()的调用.然后通过引擎CE的操作系统抽象层OSAL把参数a,b,c和调用信息VIDDEC_p_process()打包发送给DSPLink;然后通过DSPLink中转打好包的信息给DSP端的服务器骨架;最后服务器CS解析收到的信息包,由解析后的数据得知我们要调用VIDDEC_process()这一VISA API函数,并解析出所用参数为a,b,c[video_copy.c中调用VIDEC_TI_process(),这里的调用才是真正的远端服务器上执行算法].从这可以看出在server在编译时,main.c需要调用一次CERuntime_init().这一服务器骨架就知道如何调用本地(DSP端)的xDM算法以及其他方法了.这整个过程对用户来说是透明的,也就是说应用程序只需要调用Linux端的VISA API接口函数即可.接下来的内部工作由引擎CE和服务器CS来解决.数据从DSP端返回ARM端的过程与之相逆.如下图:
标签:des blog http io os 使用 java ar strong
原文地址:http://www.cnblogs.com/yanghonker/p/3983842.html