LocalTrajectoryBuilder类图,方法的参数没有画进去。
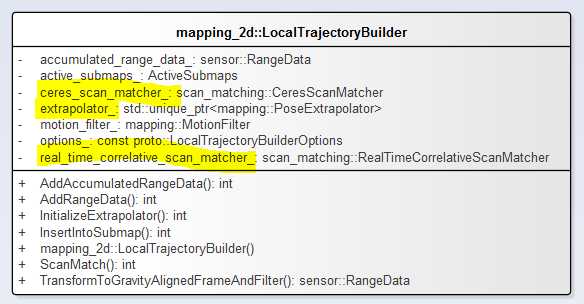
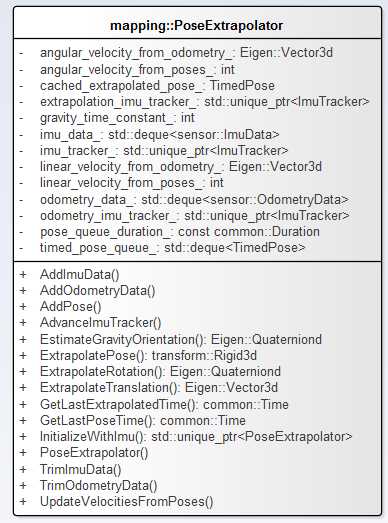
PoseExtrapolator类,Node类和LocalTrajectoryBuilder类都有PoseExtrapolator对象,好像两者并没有什么关系?Node类中的可能是为了发布位姿信息用的,单独进行了位姿推算。先不管了。
构造和初始化
1 std::unique_ptr<PoseExtrapolator> PoseExtrapolator::InitializeWithImu( 2 const common::Duration pose_queue_duration, 3 const double imu_gravity_time_constant, const sensor::ImuData& imu_data) 4 { 5 auto extrapolator = common::make_unique<PoseExtrapolator>(pose_queue_duration, imu_gravity_time_constant); 6 extrapolator->AddImuData(imu_data); 7 extrapolator->imu_tracker_ =common::make_unique<ImuTracker>(imu_gravity_time_constant, imu_data.time); 8 extrapolator->imu_tracker_->AddImuLinearAccelerationObservation( 9 imu_data.linear_acceleration); 10 extrapolator->imu_tracker_->AddImuAngularVelocityObservation( 11 imu_data.angular_velocity); 12 extrapolator->imu_tracker_->Advance(imu_data.time); 13 extrapolator->AddPose(imu_data.time,transform::Rigid3d::Rotation(extrapolator->imu_tracker_->orientation())); 14 return extrapolator; 15 }
AddImuData和AddOdometryData方法不赘述,如下查看AddRangeData方法。如果使用IMU数据,直接进入9行,如果不是用进入6行。
1 std::unique_ptr<LocalTrajectoryBuilder::MatchingResult> 2 LocalTrajectoryBuilder::AddRangeData(const common::Time time, 3 const sensor::TimedRangeData& range_data) { 4 // Initialize extrapolator now if we do not ever use an IMU. 5 if (!options_.use_imu_data()) { 6 InitializeExtrapolator(time); 7 } 8 9 if (extrapolator_ == nullptr) { 10 // Until we‘ve initialized the extrapolator with our first IMU message, we 11 // cannot compute the orientation of the rangefinder. 12 LOG(INFO) << "Extrapolator not yet initialized."; 13 return nullptr; 14 } 15 16 CHECK(!range_data.returns.empty()); 17 CHECK_EQ(range_data.returns.back()[3], 0); 18 const common::Time time_first_point = 19 time + common::FromSeconds(range_data.returns.front()[3]); 20 if (time_first_point < extrapolator_->GetLastPoseTime()) { 21 LOG(INFO) << "Extrapolator is still initializing."; 22 return nullptr; 23 } 24 25 std::vector<transform::Rigid3f> range_data_poses; 26 range_data_poses.reserve(range_data.returns.size()); 27 for (const Eigen::Vector4f& hit : range_data.returns) { 28 const common::Time time_point = time + common::FromSeconds(hit[3]); 29 range_data_poses.push_back( 30 extrapolator_->ExtrapolatePose(time_point).cast<float>()); 31 } 32 33 if (num_accumulated_ == 0) { 34 // ‘accumulated_range_data_.origin‘ is uninitialized until the last 35 // accumulation. 36 accumulated_range_data_ = sensor::RangeData{{}, {}, {}}; 37 } 38 39 // Drop any returns below the minimum range and convert returns beyond the 40 // maximum range into misses. 41 for (size_t i = 0; i < range_data.returns.size(); ++i) { 42 const Eigen::Vector4f& hit = range_data.returns[i]; 43 const Eigen::Vector3f origin_in_local = 44 range_data_poses[i] * range_data.origin; 45 const Eigen::Vector3f hit_in_local = range_data_poses[i] * hit.head<3>(); 46 const Eigen::Vector3f delta = hit_in_local - origin_in_local; 47 const float range = delta.norm(); 48 if (range >= options_.min_range()) { 49 if (range <= options_.max_range()) { 50 accumulated_range_data_.returns.push_back(hit_in_local); 51 } else { 52 accumulated_range_data_.misses.push_back( 53 origin_in_local + 54 options_.missing_data_ray_length() / range * delta); 55 } 56 } 57 } 58 ++num_accumulated_; 59 60 if (num_accumulated_ >= options_.num_accumulated_range_data()) { 61 num_accumulated_ = 0; 62 const transform::Rigid3d gravity_alignment = transform::Rigid3d::Rotation( 63 extrapolator_->EstimateGravityOrientation(time)); 64 accumulated_range_data_.origin = 65 range_data_poses.back() * range_data.origin; 66 return AddAccumulatedRangeData( 67 time, 68 TransformToGravityAlignedFrameAndFilter( 69 gravity_alignment.cast<float>() * range_data_poses.back().inverse(), 70 accumulated_range_data_), 71 gravity_alignment); 72 } 73 return nullptr; 74 }