图1. 机器人实际测试场景

图2. View of xtion

图3. laser scan (red point)
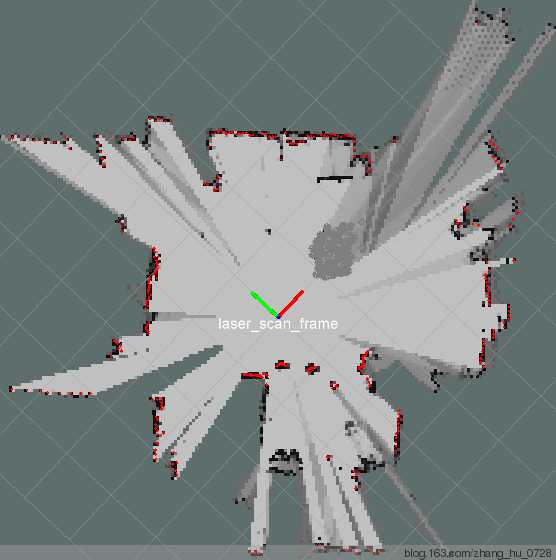
图4. xtion scan (blue point)
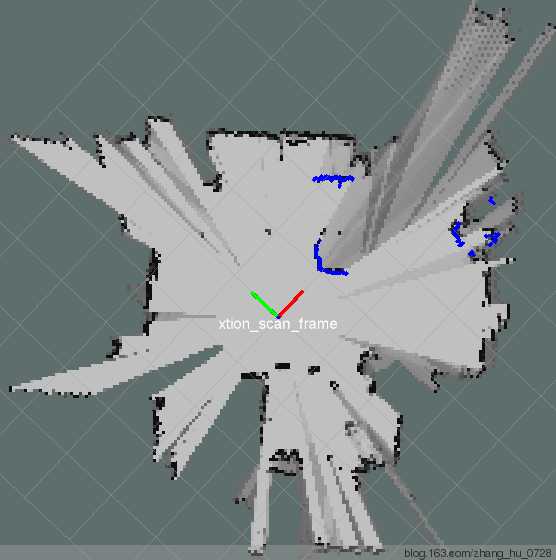
图5. Fuse xtion scan into laser scan (green point)

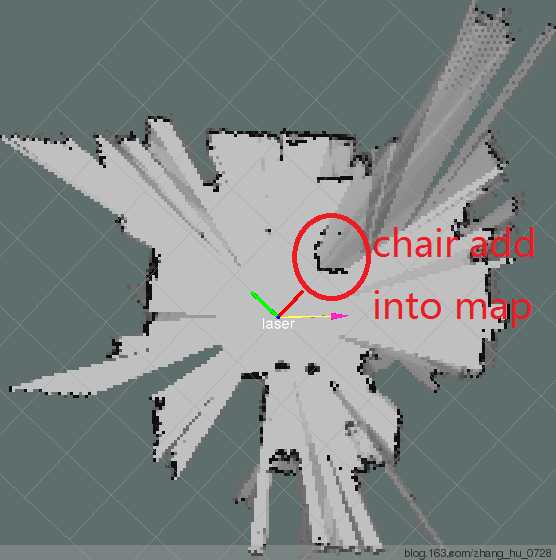
图6. Chair add into map
标签:alt bubuko 分享 ase air png nbsp class inf
图1. 机器人实际测试场景
图2. View of xtion
图3. laser scan (red point)
图4. xtion scan (blue point)
图5. Fuse xtion scan into laser scan (green point)
图6. Chair add into map
标签:alt bubuko 分享 ase air png nbsp class inf
原文地址:https://www.cnblogs.com/hiram-zhang/p/8495556.html