在机器学习、深度学习中使用的优化算法除了常见的梯度下降,还有 Adadelta,Adagrad,RMSProp 等几种优化器,都是什么呢,又该怎么选择呢?
在 Sebastian Ruder 的这篇论文中给出了常用优化器的比较,今天来学习一下:
https://arxiv.org/pdf/1609.04747.pdf
本文将梳理:
- 每个算法的梯度更新规则和缺点
- 为了应对这个不足而提出的下一个算法
- 超参数的一般设定值
- 几种算法的效果比较
- 选择哪种算法
一.优化器算法简述
首先来看一下梯度下降最常见的三种变形 BGD,SGD,MBGD,这三种形式的区别就是取决于我们用多少数据来计算目标函数的梯度,这样的话自然就涉及到一个 trade-off,即参数更新的准确率和运行时间。
1.Batch Gradient Descent (BGD)
梯度更新规则:
BGD 采用整个训练集的数据来计算 cost function 对参数的梯度:

缺点:
由于这种方法是在一次更新中,就对整个数据集计算梯度,所以计算起来非常慢,遇到很大量的数据集也会非常棘手,而且不能投入新数据实时更新模型。
for i in range(nb_epochs): params_grad = evaluate_gradient(loss_function, data, params) params = params - learning_rate * params_grad
我们会事先定义一个迭代次数 epoch,首先计算梯度向量 params_grad,然后沿着梯度的方向更新参数 params,learning rate 决定了我们每一步迈多大。
Batch gradient descent 对于凸函数可以收敛到全局极小值,对于非凸函数可以收敛到局部极小值。
2.Stochastic Gradient Descent (SGD)
梯度更新规则:
和 BGD 的一次用所有数据计算梯度相比,SGD 每次更新时对每个样本进行梯度更新,对于很大的数据集来说,可能会有相似的样本,这样 BGD 在计算梯度时会出现冗余,而 SGD 一次只进行一次更新,就没有冗余,而且比较快,并且可以新增样本。

for i in range(nb_epochs): np.random.shuffle(data) for example in data: params_grad = evaluate_gradient(loss_function, example, params) params = params - learning_rate * params_grad
看代码,可以看到区别,就是整体数据集是个循环,其中对每个样本进行一次参数更新。
随机梯度下降是通过每个样本来迭代更新一次,如果样本量很大的情况,那么可能只用其中部分的样本,就已经将theta迭代到最优解了,对比上面的批量梯度下降,迭代一次需要用到十几万训练样本,一次迭代不可能最优,如果迭代10次的话就需要遍历训练样本10次。缺点是SGD的噪音较BGD要多,使得SGD并不是每次迭代都向着整体最优化方向。所以虽然训练速度快,但是准确度下降,并不是全局最优。
缺点:
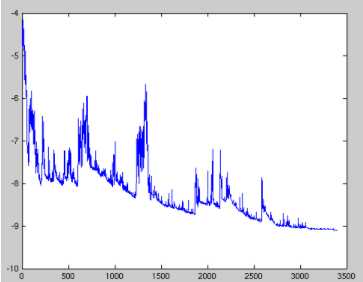
SGD 因为更新比较频繁,会造成 cost function 有严重的震荡。
BGD 可以收敛到局部极小值,当然 SGD 的震荡可能会跳到更好的局部极小值处。
当我们稍微减小 learning rate,SGD 和 BGD 的收敛性是一样的。
3.Mini-Batch Gradient Descent (MBGD)
梯度更新规则:
MBGD 每一次利用一小批样本,即 n 个样本进行计算,这样它可以降低参数更新时的方差,收敛更稳定,另一方面可以充分地利用深度学习库中高度优化的矩阵操作来进行更有效的梯度计算。

和 SGD 的区别是每一次循环不是作用于每个样本,而是具有 n 个样本的批次。
for i in range(nb_epochs): np.random.shuffle(data) for batch in get_batches(data, batch_size=50): params_grad = evaluate_gradient(loss_function, batch, params) params = params - learning_rate * params_grad
超参数设定值: n 一般取值在 50~256
缺点:(三大缺点)
- 不过 Mini-batch gradient descent 不能保证很好的收敛性,learning rate 如果选择的太小,收敛速度会很慢,如果太大,loss function 就会在极小值处不停地震荡甚至偏离。(有一种措施是先设定大一点的学习率,当两次迭代之间的变化低于某个阈值后,就减小 learning rate,不过这个阈值的设定需要提前写好,这样的话就不能够适应数据集的特点。)
- SGD对所有参数更新时应用同样的 learning rate,如果我们的数据是稀疏的,我们更希望对出现频率低的特征进行大一点的更新。
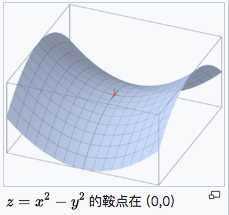
- 对于非凸函数,还要避免陷于局部极小值处,或者鞍点处,因为鞍点周围的error是一样的,所有维度的梯度都接近于0,SGD 很容易被困在这里。
鞍点就是:一个光滑函数的鞍点邻域的曲线,曲面,或超曲面,都位于这点的切线的不同边。例如这个二维图形,像个马鞍:在x-轴方向往上曲,在y-轴方向往下曲,鞍点就是(0,0)。
为了应对上面的三点挑战就有了下面这些算法。
[应对挑战 1]
4.Momentum
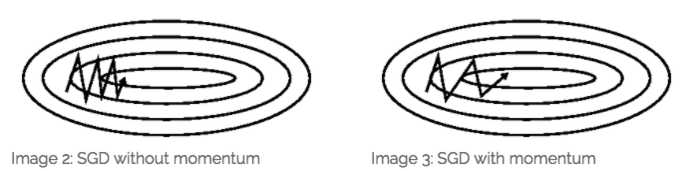
SGD 在 ravines 的情况下容易被困住, ravines 就是曲面的一个方向比另一个方向更陡,这时 SGD 会发生震荡而迟迟不能接近极小值:
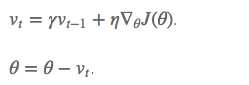
梯度更新规则:
Momentum 通过加入 γv_t−1 ,可以加速 SGD, 并且抑制震荡
当我们将一个小球从山上滚下来时,没有阻力的话,它的动量会越来越大,但是如果遇到了阻力,速度就会变小。
加入的这一项,可以使得梯度方向不变的维度上速度变快,梯度方向有所改变的维度上的更新速度变慢,这样就可以加快收敛并减小震荡。
超参数设定值: 一般 γ 取值 0.9 左右。
缺点:
这种情况相当于小球从山上滚下来时是在盲目地沿着坡滚,如果它能具备一些先知,例如快要上坡时,就知道需要减速了的话,适应性会更好。
5.Nesterov Accelerated Gradient
梯度更新规则:
用 θ−γv_t−1 来近似当做参数下一步会变成的值,则在计算梯度时,不是在当前位置,而是未来的位置上
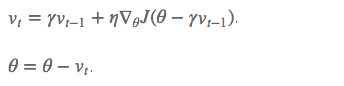
超参数设定值: 一般 γ 仍取值 0.9 左右。
效果比较:
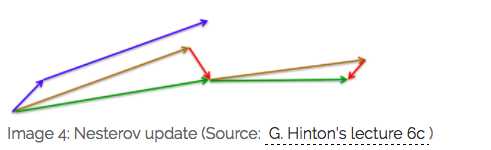
蓝色是 Momentum 的过程,会先计算当前的梯度,然后在更新后的累积梯度后会有一个大的跳跃。
而 NAG 会先在前一步的累积梯度上(brown vector)有一个大的跳跃,然后衡量一下梯度做一下修正(red vector),这种预期的更新可以避免我们走的太快。
NAG 可以使 RNN 在很多任务上有更好的表现。
目前为止,我们可以做到,在更新梯度时顺应 loss function 的梯度来调整速度,并且对 SGD 进行加速。
我们还希望可以根据参数的重要性而对不同的参数进行不同程度的更新。
[应对挑战 2]
6.Adagrad
这个算法就可以对低频的参数做较大的更新,对高频的做较小的更新,也因此,对于稀疏的数据它的表现很好,很好地提高了 SGD 的鲁棒性,例如识别 Youtube 视频里面的猫,训练 GloVe word embeddings,因为它们都是需要在低频的特征上有更大的更新。
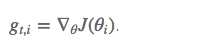
梯度更新规则:

其中 g 为:t 时刻参数 θ_i 的梯度
如果是普通的 SGD, 那么 θ_i 在每一时刻的梯度更新公式为:

但这里的 learning rate η 也随 t 和 i 而变:

其中 G_t 是个对角矩阵, (i,i) 元素就是 t 时刻参数 θ_i 的梯度平方和。
Adagrad 的优点是减少了学习率的手动调节