1.启动机器人发布必要的topic数据
(1)启动奥比中光深度摄像头
$ roslaunch astra_launch astra.launch depth_registration:=true
其中发布的必要的topic如下:
/camera/rgb/image_rect_color
/camera/depth_registered/image_raw
/camera/rgb/camera_info
(2)启动轮式底盘
$ roslaunch dashgo_bringup minimal.launch
其中发布的必要topic如下:
/odom
(3)启动激光雷达
$ roslaunch talker ls01D.launch
其中发布的必要topic如下:
/scan
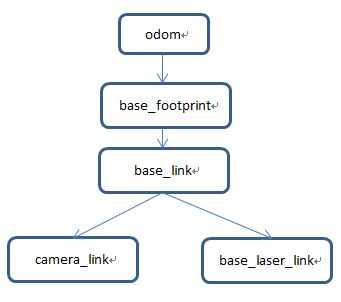
2.发布必要的tf关系
启动机器人的urdf模型,发布必要的tf关系
$ roslaunch dashgo_description dashgo_description.launch
其发布必要的tf关系如下:
3.制作rtabmap_ros的启动文件
找到rtabmap_ros/launch/demo/demo_turtlebot_mapping.launch ,对文件做如下修改:
将rtabmapviz取值设为true,将move_base启动部分注释,然后直接启动:
$ roslaunch rtabmap_ros demo_turtlebot_mapping.launch
现在就可以遥控我们的机器人运动,进行rgbd+laser+轮式odom联合建图了。