1、什么是SPI?
SPI是串行外设接口(Serial Peripheral Interface)的缩写。是 Motorola 公司推出的一
种同步串行接口技术,是一种高速的,全双工,同步的通信总线。
2、SPI优点
支持全双工通信
通信简单
数据传输速率块
3、缺点
没有指定的流控制,没有应答机制确认是否接收到数据,所以跟IIC总线协议比较在数据
可靠性上有一定的缺陷。
4、特点
1):高速、同步、全双工、非差分、总线式
2):主从机通信模式
5、协议通信时序详解
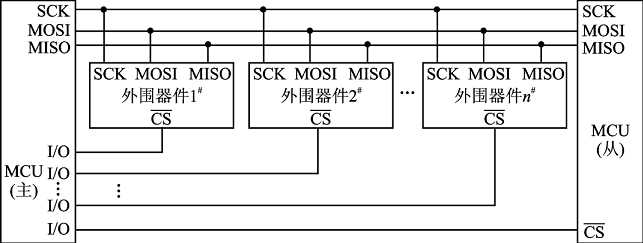
1):SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多
个从设备,需要至少4根线,事实上3根也可以(单向传输时)。也是所有基于SPI的设备共
有的,它们是SDI(数据输入)、SDO(数据输出)、SCLK(时钟)、CS(片选)。
(1)SDO/MOSI – 主设备数据输出,从设备数据输入;
(2)SDI/MISO – 主设备数据输入,从设备数据输出;
(3)SCLK – 时钟信号,由主设备产生;
(4)CS/SS – 从设备使能信号,由主设备控制。当有多个从设备的时候,因为每个从设
备上都有一个片选引脚接入到主设备机中,当我们的主设备和某个从设备通信时将需
要将从设备对应的片选引脚电平拉低或者是拉高。
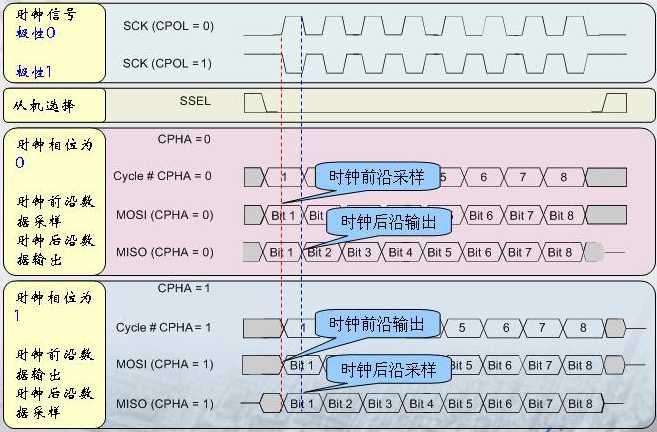
2):需要说明的是,我们SPI通信有4种不同的模式,不同的从设备可能在出厂是就是配
置为某种模式,这是不能改变的;但我们的通信双方必须是工作在同一模式下,所以我们
可以对我们的主设备的SPI模式进行配置,通过CPOL(时钟极性)和CPHA(时钟相位)来
控制我们主设备的通信模式,具体如下:
Mode0:CPOL=0,CPHA=0
Mode1:CPOL=0,CPHA=1
Mode2:CPOL=1,CPHA=0
Mode3:CPOL=1,CPHA=1
时钟极性CPOL是用来配置SCLK的电平出于哪种状态时是空闲态或者有效态,时钟相位CPHA
是用来配置数据采样是在第几个边沿:
CPOL=0,表示当SCLK=0时处于空闲态,所以有效状态就是SCLK处于高电平时
CPOL=1,表示当SCLK=1时处于空闲态,所以有效状态就是SCLK处于低电平时
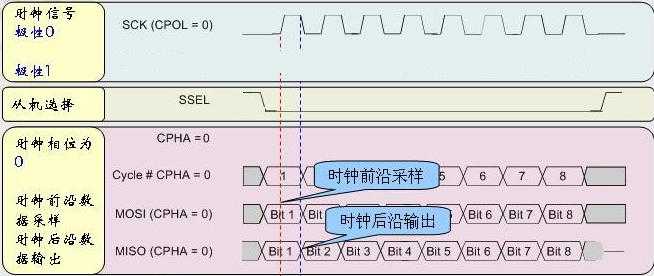
CPHA=0,表示数据采样是在第1个边沿,数据发送在第2个边沿
CPHA=1,表示数据采样是在第2个边沿,数据发送在第1个边沿
例如:
CPOL=0,CPHA=0:此时空闲态时,SCLK处于低电平,数据采样是在第1个边沿,也就是
SCLK由低电平到高电平的跳变,所以数据采样是在上升沿,数据发送是在下降沿。
CPOL=0,CPHA=1:此时空闲态时,SCLK处于低电平,数据发送是在第1个边沿,也就是
SCLK由低电平到高电平的跳变,所以数据采样是在下降沿,数据发送是在上升沿。
CPOL=1,CPHA=0:此时空闲态时,SCLK处于高电平,数据采集是在第1个边沿,也就是
SCLK由高电平到低电平的跳变,所以数据采集是在下降沿,数据发送是在上升沿。
CPOL=1,CPHA=1:此时空闲态时,SCLK处于高电平,数据发送是在第1个边沿,也就是
SCLK由高电平到低电平的跳变,所以数据采集是在上升沿,数据发送是在下降沿。
需要注意的是:我们的主设备能够控制时钟,因为我们的SPI通信并不像UART或者IIC通信
那样有专门的通信周期,有专门的通信起始信号,有专门的通信结束信号;所以我们的
SPI协议能够通过控制时钟信号线,当没有数据交流的时候我们的时钟线要么是
保持高电平要么是保持低电平。
6、内部工作机制
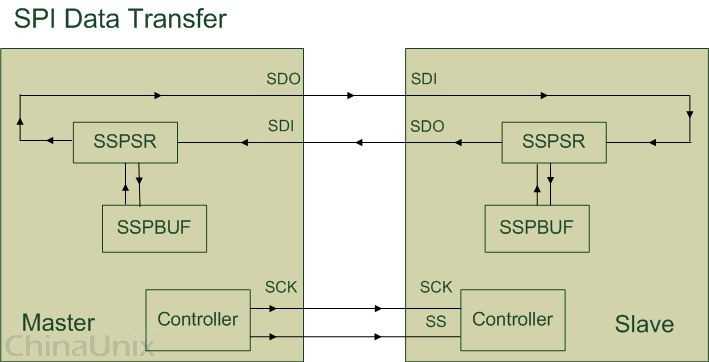
SSPSR 是 SPI 设备内部的移位寄存器(Shift Register). 它的主要作用是根据 SPI
时钟信号状态, 往 SSPBUF 里移入或者移出数据, 每次移动的数据大小由 Bus-Width 以
及 Channel-Width 所决定.
最后,再附上用IO口来模拟的四种SPI模式程序,仅作参考理解用,还要根据实际情况改写,如下:
//表示相关引脚高低电平,要根据实际引脚修改。
SSEL_D(0) SSEL_D(1) //片选
SCK_D(0) SCK_D(1) //时钟信号
MOSI_D(0) MOSI_D(1) //SDO
MISO_I(0) MISO_I(1) //SDI
#define _CPOL 1 //时钟极性
#define _CPHA 0 //时钟相位
//延时子程序
void delay()
{
unsigned char m,n;
for(n=0;n<5;n++);
for(m=0;m<100;m++);
}
/**********************************************
模式零 写数据
***********************************************/
#if _CPOL==0&&_CPHA==0 //MODE 0 0
void SPI_Send_Dat(unsigned char dat)
{
unsigned char n;
for(n=0;n<8;n++)
{
SCK_D(0);
if(dat&0x80)MOSI_D(1);
else MOSI_D(0);
dat<<=1;
SCK_D(1);
}
SCK_D(0);
}
/*********************************************
模式零 读数据
*********************************************/
unsigned char SPI_Receiver_Dat(void)
{
unsigned char n ,dat,bit_t;
for(n=0;n<8;n++)
{
SCK_D(0);
dat<<=1;
if(MISO_I())dat|=0x01;
else dat&=0xfe;
SCK_D(1);
}
SCK_D(0);
return dat;
}
#endif
/*********************************************
模式一 写数据
*********************************************/
#if _CPOL==0&&_CPHA==1 //MODE 0 1
void SPI_Send_Dat(unsigned char dat)
{
unsigned char n;
SCK_D(0);
for(n=0;n<8;n++)
{
SCK_D(1);
if(dat&0x80)MOSI_D(1);
else MOSI_D(0);
dat<<=1;
SCK_D(0);
}
}
/*********************************************
模式一 读数据
*********************************************/
unsigned char SPI_Receiver_Dat(void)
{
unsigned char n ,dat,bit_t;
for(n=0;n<8;n++)
{
SCK_D(1);
dat<<=1;
if(MISO_I())dat|=0x01;
else dat&=0xfe;
SCK_D(0);
}
SCK_D(0);
return dat;
}
#endif
/**********************************************
模式二 写数据
***********************************************/
#if _CPOL==1&&_CPHA==0 //MODE 1 0
void SPI_Send_Dat(unsigned char dat)
{
unsigned char n;
for(n=0;n<8;n++)
{
SCK_D(1);
if(dat&0x80)MOSI_D(1);
else MOSI_D(0);
dat<<=1;
SCK_D(0);
}
SCK_D(1);
}
/*********************************************
模式二 读数据
*********************************************/
unsigned char SPI_Receiver_Dat(void)
{
unsigned char n ,dat,bit_t;
for(n=0;n<8;n++)
{
SCK_D(1);
dat<<=1;
if(MISO_I())dat|=0x01;
else dat&=0xfe;
SCK_D(0);
}
SCK_D(1);
return dat;
}
#endif
/**********************************************
模式三 写数据
***********************************************/
#if _CPOL==1&&_CPHA==1 //MODE 1 1
void SPI_Send_Dat(unsigned char dat)
{
unsigned char n;
SCK_D(1);
for(n=0;n<8;n++)
{
SCK_D(0);
if(dat&0x80)MOSI_D(1);
else MOSI_D(0);
dat<<=1;
SCK_D(1);
}
}
/************************************
模式三 读数据
************************************/
unsigned char SPI_Receiver_Dat(void)
{
unsigned char n ,dat,bit_t;
SCK_D(0);
for(n=0;n<8;n++)
{ SCK_D(0);
dat<<=1;
if(MISO_I())dat|=0x01;
else dat&=0xfe;
SCK_D(1);
}
SCK_D(1);
return dat;
}
#endif
void main()
{
SPI_Init();
DDRB = 0XFF;
//#if _CPOL
//SCK_D(0);
//#endif
while(1)
{
//SSEL_D(0);
//SPI_Send_Dat(0x01);
//SPI_Send_Dat(0x31);
//SSEL_D(1);
SSEL_D(0);
SPI_Send_Dat(0x81);
PORTB =SPI_Receiver_Dat();
SSEL_D(1);
//delay();
}
}