深度图转点云的计算方法不复杂,是根据内外参矩阵变换公式得到的。
一个相机的三维点[x,y,z]和它在图像中的像素坐标[u,v,d],存在着一个固定的对应关系(对于小孔成像的相机原理的相机)
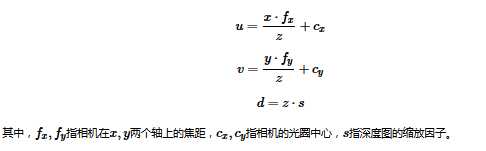
上述的公式是从世界坐标得到图像中像素坐标,同理也可从从图像的像素坐标转换到世界坐标下。
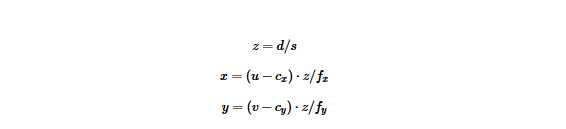
根据这个公式可以对点云进行构建。
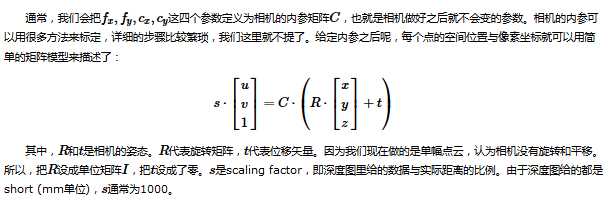
如果相机发生了位移和旋转,那么只需要对这些点进行相应的处理即可。(一般相机在0时刻是与世界坐标重合的)
对于深度图中的点,转换成三维坐标在程序中一般是如下这样的:
for (int m = 0; m < depth.rows; m++)
for (int n=0; n < depth.cols; n++)
{
// 获取深度图中(m,n)处的值
ushort d = depth.ptr<ushort>(m)[n];
// d 可能没有值,若如此,跳过此点
if (d == 0)
continue;
// d 存在值,则向点云增加一个点
PointT p;
// 计算这个点的空间坐标
p.z = double(d) / camera_factor;
p.x = (n - camera_cx) * p.z / camera_fx;
p.y = (m - camera_cy) * p.z / camera_fy;
}
点云也可以加入颜色,若有RGB图也是可以的。(这里要注意深度没有值的时候,在应用的时候的具体情况,是否需要在这种情况下具体处理)