最近在看三维重建方面的论文,进行一下知识总结。
三维重建技术
三维重建技术就是要在计算机中真实地重建出该物体表面的三维虚拟模型,构建一个物体完整的三维模型,大致可以分为三步:
- 利用摄像机等图像采集设备对物体的点云数据从各个角度釆集,单个摄像机只能对物体的一个角度进行拍摄,要获得物体表面完整信息,需要从多个角度对物体拍摄;
- 将第一步获得的各视角点云数据变换到同一个坐标系下,完成多视角点云数据的配准;
- 根据配准好的点云数据构建出模型的网格表面。
三维重建方法
目前根据重建方式的不同,主要有以下几种重建方法:
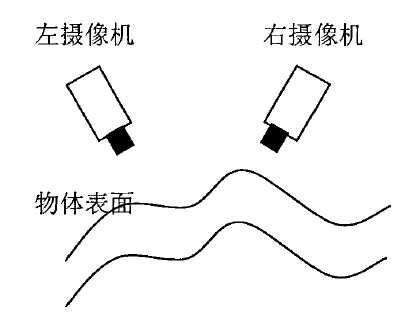
双目立体视觉方法
双目立体视觉测量方法主要是模拟人类双眼的立体成像原理,左右两个有合适角度的摄像机在同一时间拍摄场景中某一物体,通过三角几何关系和视差原理,获取左右摄像机相同视角下物体表面点的坐标信息,进而构建出物体的位置和形状。
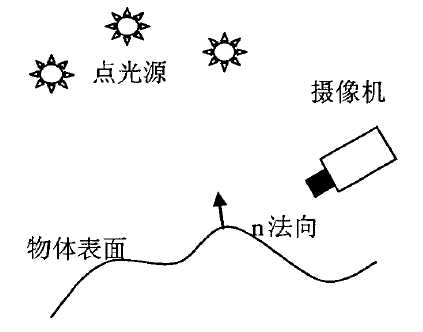
光度立体视觉方法
根据颜色理论,物体表面在不同的光照条下的颜色亦不一样,光度立体视觉拍摄物体在各个方向光照条件下的同一处表面,利用获得的这一组图像来重建物体表面形状。理论上三个光源就能够计算出物体表面某一点的法向量,但通常为了避免噪声干扰、提高精度等,会选择个方向以上的光源。
三目立体视觉及多目立体视觉
双目立体视觉中,匹配的往往结果取决于被拍摄物体表面纹理颜色信息的多寡。在物体纹理信息较少时,左右两幅图像像素匹配时容易产生错误匹配,结果不可靠。为减少错误匹配、提高双目视觉匹配精度,三目及多目立体视觉系统是一种解决方法。多目立体视觉中的匹配根据光学三角形理论,采用多个重叠点多角度前面交汇”的方法,因而可以有效使用冗佘数据,一定程度上解决误匹配问题,提高三维重建精度,但是这种方法较为繁琐,同时使用的硬件设备也更加复杂和昂贵。
基于运动的三维重建
这种方法多用于动态场景跟踪等领域,算法的基本原理是依靠相对运动的摄像机输出一系列图像来重建物体的三维信息。
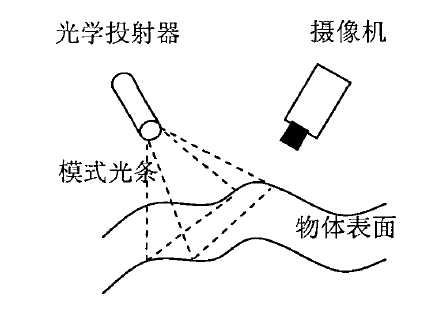
结构光立体视觉
结构光立体视觉方法是使用标准的光栅条纹结构光投射到物体表面,投影光条跟随物体表面形状的起伏而发生变化,摄像机拍摄物体表面图像,从被物体表面形状所调制了的条纹模式中,提取出物体的三维信息。结构光立体视觉方法以光学三角法测量理论为基础,在测量之前先要对摄像机和光学投影仪标定。
下一步打算看下线结构光立体视觉和双目立体视觉相关知识。