标签:需要 tor 基本 pre 消元 return image jacob ldl
Eigen提供了解线性方程的计算方法,包括LU分解法,QR分解法,SVD(奇异值分解)、特征值分解等。对于一般形式如下的线性系统:
解决上述方程的方式一般是将矩阵A进行分解,当然最基本的方法是高斯消元法。
先来看Eigen 官方的第一个例程:
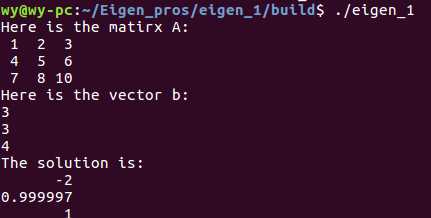
1 #include <iostream> 2 #include <Eigen/Dense> 3 4 using namespace std; 5 using namespace Eigen; 6 7 int main() 8 { 9 Matrix3f A; 10 Vector3f b; 11 A << 1,2,3, 4,5,6, 7,8,10; 12 b << 3,3,4; 13 cout<<"Here is the Matrix A:\n"<< A <<endl; 14 cout<<" Here is the vector b:\n"<< b <<endl; 15 Vector3f x = A.colPivHouseholderQr().solve(b); 16 cout<<"The solution is:\n"<<x<<endl; 17 return 0; 18 }
运行结果如下:
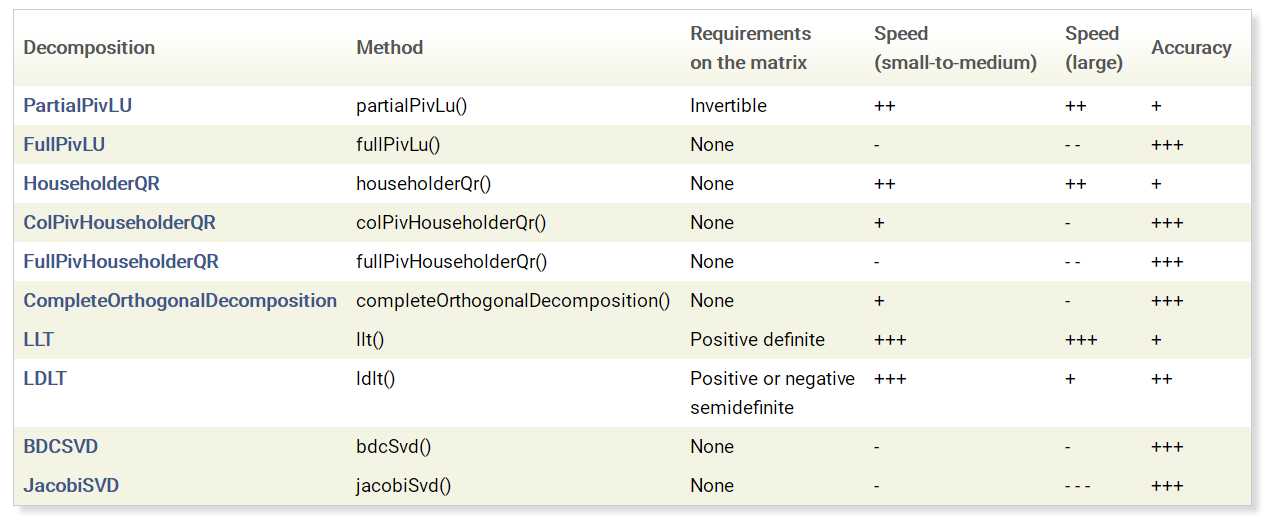
Eigen内置的解线性方程组的算法如下表所示:
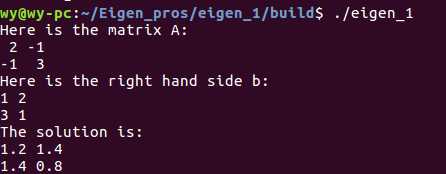
使用这些接口也可以解决矩阵相乘的问题:
1 #include <iostream> 2 #include <Eigen/Dense> 3 4 using namespace std; 5 using namespace Eigen; 6 7 int main() 8 { 9 Matrix2f A,b; 10 A << 2,-1,-1,3; 11 b << 1,2,3,1; 12 cout<<"Here is the matrix A:\n"<<A<<endl; 13 cout<<"Here is the right hand side b:\n"<<b<<endl; 14 Matrix2f x = A.ldlt().solve(b); 15 cout<<"The solution is:\n"<<x<<endl; 16 return 0; 17 }
运行结果如下:
Eigen也提供了计算特征值和特征向量的算法:
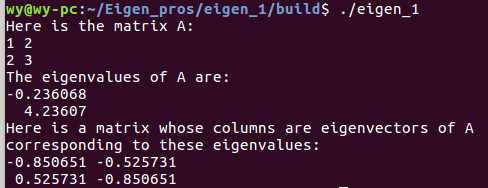
下面是一个简单的例子:
1 #include <iostream> 2 #include <Eigen/Dense> 3 4 using namespace std; 5 using namespace Eigen; 6 7 int main() 8 { 9 Matrix2f A; 10 A << 1,2,2,3; 11 cout<<"Here is the matrix A:\n"<<A<<endl; 12 SelfAdjointEigenSolver<Matrix2f> eigensolver(A); 13 if( eigensolver.info() != Success ) abort(); 14 cout<<" The eigenvalues of A are:\n"<<eigensolver.eigenvalues()<<endl; 15 cout<<" Here is a matrix whose columns are eigenvectors of A\n" 16 <<" corresponding to these eigenvalues:\n" 17 <<eigensolver.eigenvectors()<<endl; 18 return 0; 19 }
运行结果如下:
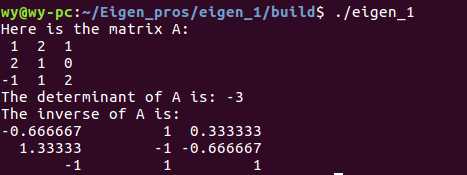
Eigen 也提供了求逆矩阵和求矩阵行列式的算法,但是这两种算法对于大型矩阵来说都是非常不经济的算法,当需要对大型矩阵做这种的操作时,需要自己判断到底需不需这样做。但是对于小型矩阵 则可以没有顾虑地使用。
下面是一个例子:
1 #include <iostream> 2 #include <Eigen/Dense> 3 4 using namespace std; 5 using namespace Eigen; 6 7 int main() 8 { 9 Matrix3f A; 10 A << 1,2,1, 11 2,1,0, 12 -1,1,2; 13 14 cout<<"Here is the matrix A:\n"<<A<<endl; 15 cout<<"The determinant of A is "<<A.determinant()<<endl; 16 cout<<"The inverse of A is:\n"<<A.inverse()<<endl; 17 return 0; 18 }
运行结果如下:
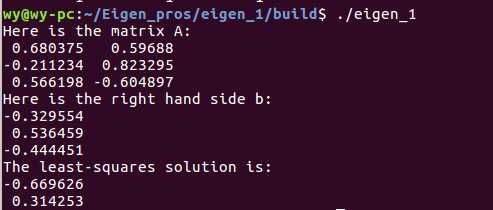
Eigen也提供了解最小二乘问题的解法,并给出两种实现,分别是BDCSVD和JacobiSVD,其中推荐使用的一种是BDCSVD。下面是一个例子:
1 #include <iostream> 2 #include <Eigen/Dense> 3 4 using namespace std; 5 using namespace Eigen; 6 7 int main() 8 { 9 MatrixXf A = MatrixXf::Random(3,2); 10 cout<<"Here is the matrix A:\n"<<A<<endl; 11 VectorXf b = VectorXf::Random(3); 12 cout<<"Here is the right hand side b:\n"<<b<<endl; 13 cout<<"The least-squares solution is:\n" 14 <<A.bdcSvd(ComputeThinU|ComputeThinV).solve(b)<<endl; 15 return 0; 16 }
运行结果如下:
标签:需要 tor 基本 pre 消元 return image jacob ldl
原文地址:https://www.cnblogs.com/wangxiaoyong/p/8977343.html