标签:基础上 矩阵 lam 表示 坐标 https 自动 应该 lock
不仅仅在SLAM中,计算机视觉中有很多约定俗成的假设,会给阅读者带来一定的理解困难。
以世界坐标到像素坐标的转化为例:
(关于什么是世界坐标、像素坐标、图像坐标,可以参考我的视频:https://www.bilibili.com/video/av22842726)
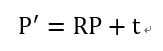
P‘ 表示变换后的点坐标;
P 表示原来的点坐标;
R 是3X3旋转向量;
t 是3X1平移矩阵
这里的P‘ 和 P 都是三维坐标。
T 是4X4的外参矩阵;
所以,对应的P‘和P应该是四维向量才可以计算。就是在三维的基础上,加一个1.
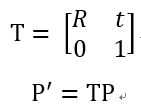
约定,在表示RP和TP的时候,看情况,自动将P选择为满足运算的形式。
标签:基础上 矩阵 lam 表示 坐标 https 自动 应该 lock
原文地址:https://www.cnblogs.com/alexYuin/p/8984749.html