标签:物理状态 维护 一点 复选框 是的 应该 style 驾驶 停止
现在让我们考虑一下我们可能想要在高速公路上驾驶汽车的状态。
从头开始创建一个有限状态机。保持简单。如果我们是唯一一辆路上的车,会发生什么?
我想我们需要一个状态来正常待在你的车道上。
如果我们正在改变车道,我们想要一个状态来代表这一点。或者,也许两个状态,因为改变车道左侧不同于右侧。
好的。我猜。如果我们面前有车辆,会发生什么变化?那么我们可能慢下来,所以我们应该有一个状态或我们可能想通过它。
我想,但不是只通过左侧车道变更,然后右侧车道变更?真的需要这个的状态吗?集思广益,没有坏主意。
好的。那么,如果我们有更多的汽车会发生什么变化?我可以想象在这种情况下,你可能想放慢脚步,这样你就可以
如果进展缓慢,可能会在这里融合到这个差距中,然后通过这辆车。我们真的应该有一个缓慢的状态
我想这意味着我们也需要加快北部的速度。如果遇到紧急情况,我们应该增加一个停止状态。
我想我们可以通过保持目标速度状态一次完成所有这些。那么我不知道。
速度不应该由您驾驶的车道和速度限制决定吗?
如果我们只是添加一个准备车道变化状态来表示何时在换道之前,自我车辆是否试图在交通中出现空白?
是的,这可以工作,但我们可能应该有准备车道变更并准备车道变更权,
因为那些真的是不同的演习。哦,我们也可以打开转向灯。好点子。事实是,没有一套正确的状态可供选择。
一方面,我们希望保持我们的状态空间像可维护性原因,但另一方面,我们要确保我们有足够的逻辑状态
实际上代表我们关心的所有物理状态。正如你在讨论中看到的那样,我们已经有了它不容易找到这个场景的完美状态集合。
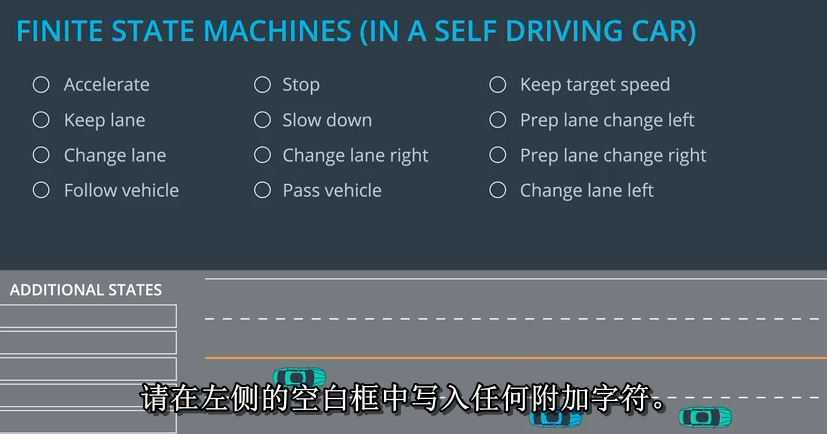
你为什么不想一下你想要的状态用于表示高速公路上的车辆行为。
选中您要保留的每个状态旁边的复选框请在左侧的空白框中写入任何附加字符。
标签:物理状态 维护 一点 复选框 是的 应该 style 驾驶 停止
原文地址:https://www.cnblogs.com/fuhang/p/8994691.html