标签:三维 相机 raycast 卡尔 变换 分辨率 frame 估计 距离
原po:https://blog.csdn.net/qq_31785865/article/details/78524429
最近在看关于稠密三维重建的相关算法,看到了KinectFusion,KinectFusion是微软研究院研发的基于Kinect实现的稠密三维重建项目。采用GPU加速的KinectFusion可以实时的实现稠密三维重建。流程步骤如下图所示:
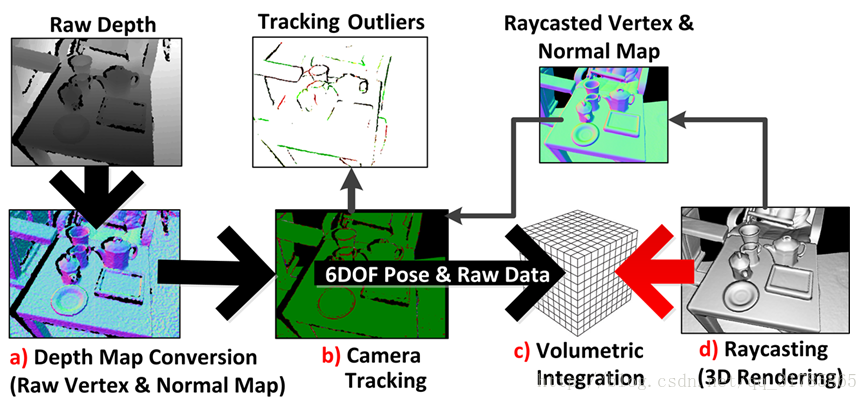
Raycasting :根据当前帧相机位姿将模型中的点云投影到当前帧并且计算其法向量,用来在步骤2中对下一帧的输入图像配准。
这里重点学习了一下TSDF
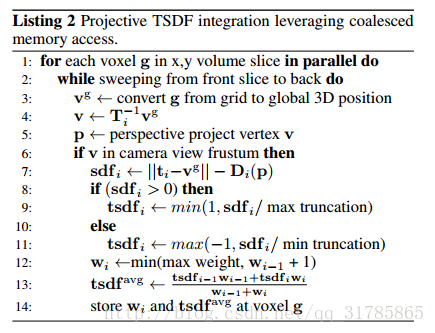
TSDF(Truncated Signed Distance Function)的作用是将点云的深度估计值和深度相机的测量值进行融合,提高深度估计的精度,改善地图效果。流程如下图所示:
将重建空间进行体素划分,如下图
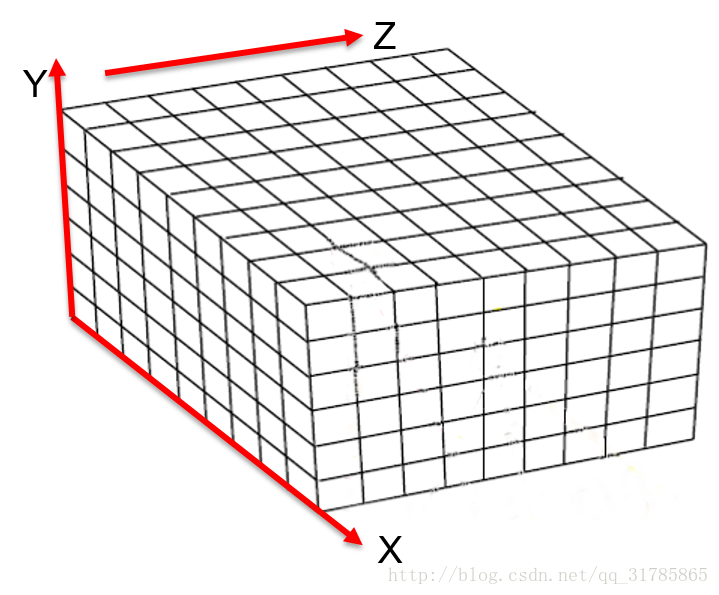
我们将整个空间的体素全部存入GPU运算,每个线程处理一条(x,y)。即对于(x,y,z)的晶格坐标,每个GPU进程扫描处理一个(x,y)坐标下的晶格柱。
标签:三维 相机 raycast 卡尔 变换 分辨率 frame 估计 距离
原文地址:https://www.cnblogs.com/BambooEatPanda/p/9052229.html