标签:direction cti ati mcu output state NPU 图片 技术
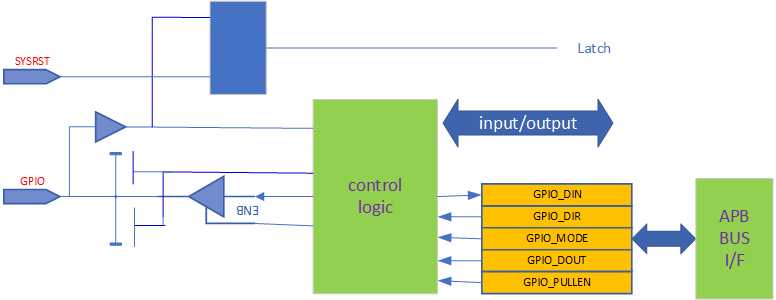
一.block Dragram
一般来说,GPIO引脚功能复用,可作为EINT、GPIO、或I2C、SPI等,通过GPIO_MODE进行选择
GPIO_DIR:控制输入输出的方向,为0作为input,为1作为output,默认状态为0
GPIO_DIN:通过访问寄存器可以得知输入的是高电平还是低电平
GPIO_OUT:控制输出高低电平
GPIO_PULLEN:是否支持上下拉
mtk的文档给的block dragram中并没有标全,还有设置上下拉,SMT,slew rate这些属性
二.dws中的配置

依次来看下GPIO的配置项:
最终生成cust_gpio_boot.h和cust_gpio_usage.h两个头文件,取GPIO8看下实际内容,还是比较一目了然的
cust_gpio_boot.h //Configureation for Pin 8 #define GPIO8_MODE GPIO_MODE_00 #define GPIO8_DIR GPIO_DIR_OUT #define GPIO8_PULLEN GPIO_PULL_DISABLE #define GPIO8_PULL GPIO_PULL_DOWN #define GPIO8_DATAOUT GPIO_OUT_ZERO #define GPIO8_SMT GPIO_SMT_DISABLE
cust_gpio_usage.h #define GPIO_FLASH_LED_EN (GPIO8 | 0x80000000) #define GPIO_FLASH_LED_EN_M_GPIO GPIO_MODE_00 #define GPIO_FLASH_LED_EN_M_PWM GPIO_MODE_01 #define GPIO_FLASH_LED_EN_M_PCC_PPC_IO GPIO_MODE_02 #define GPIO_FLASH_LED_EN_M_CONN_MCU_TRST_B GPIO_MODE_04 #define GPIO_FLASH_LED_EN_M_C2K_DM_JTINTP GPIO_MODE_05 #define GPIO_FLASH_LED_EN_M_IO_JTAG_TRSTN GPIO_MODE_06 #define GPIO_FLASH_LED_EN_M_DBG_MON_A GPIO_MODE_07
lk阶段中对gpio进行初始化
void mt_gpio_set_default(void) { //mt_gpio_set_avoid_leakage(); mt_gpio_set_default_chip(); //mt_gpio_set_driving(); //mt_gpio_set_power(); mutex_init(&gpio_mutex); return; } void mt_gpio_set_default_chip(void) { unsigned pin = 0; for (pin = 0; pin < MT_GPIO_BASE_MAX; pin++) { /* set GPIOx_MODE*/ mt_set_gpio_mode(0x80000000+pin ,gpio_array[pin].mode); /* set GPIOx_DIR*/ mt_set_gpio_dir(0x80000000+pin ,gpio_array[pin].dir); //GPIOVER("fwq2..........\n"); /* set GPIOx_PULLEN*/ mt_set_gpio_pull_enable(0x80000000+pin ,gpio_array[pin].pullen); //GPIOVER("fwq3..........\n"); /* set GPIOx_PULL*/ mt_set_gpio_pull_select(0x80000000+pin ,gpio_array[pin].pull); /* set GPIOx_DATAOUT*/ mt_set_gpio_out(0x80000000+pin ,gpio_array[pin].dataout); //GPIOVER("fwq5..........\n"); /* set GPIO0_SMT */ mt_set_gpio_smt(0x80000000+pin ,gpio_array[pin].smt); }
三.MTK 旧时API(MTK不推荐这种方法)
设置mode >> 设置dir >>设置上下拉使能 >>设置上下拉
GPIO设置为中断:mode0 >> input >> 根据实际连接设置上下拉
mt-plat/mt-gpio.h /*direction*/ int mt_set_gpio_dir(unsigned long pin, unsigned long dir); int mt_get_gpio_dir(unsigned long pin); /*pull enable*/ int mt_set_gpio_pull_enable(unsigned long pin, unsigned long enable); int mt_get_gpio_pull_enable(unsigned long pin); /*schmitt trigger*/ int mt_set_gpio_smt(unsigned long pin, unsigned long enable); int mt_get_gpio_smt(unsigned long pin); /*IES*/ int mt_set_gpio_ies(unsigned long pin, unsigned long enable); int mt_get_gpio_ies(unsigned long pin); /*pull select*/ int mt_set_gpio_pull_select(unsigned long pin, unsigned long select); int mt_get_gpio_pull_select(unsigned long pin); /*data inversion*/ int mt_set_gpio_inversion(unsigned long pin, unsigned long enable); int mt_get_gpio_inversion(unsigned long pin); /*input/output*/ int mt_set_gpio_out(unsigned long pin, unsigned long output); int mt_get_gpio_out(unsigned long pin); int mt_get_gpio_in(unsigned long pin); /*mode control*/ int mt_set_gpio_mode(unsigned long pin, unsigned long mode); int mt_get_gpio_mode(unsigned long pin);
四.pinctrl的方法
dts中设置pinctrl的方式如下
&device{ ...... pinctrl-names = "aaa","bbb","ccc"; pinctrl-0 = <&xxx>; pinctrl-1 = <&yyy>; pinctrl-2 = <&zzz>; ...... }; &pio { xxx: config0 { pins_cmd_dat { pins = <PINMUX_GPIO1__FUNC_GPIO1>; ----设置GPIO mode,在boot/dts/中mtxxxx-pinfunc.h里有定义 slew-rate = <0>; ----设置GPIO dir,0为input,1为output bias-pull-down = <11>; ----设置pull enable,下拉,后面的11并无影响,写00也可以 input-schmitt-enable = <0>; ----设置SMT enable }; }; yyy: config1 { pins_cmd_dat { pins = <PINMUX_GPIO1__FUNC_GPIO1>; slew-rate = <1>; bias-pull-up = <11>; output-low; ----设置低电平输出,只有在slew-rate设置为1时才有效,output-high就是设置为高电平输出 input-schmitt-enable = <0>; }; }; zzz: config2 { pins_cmd_dat { pins = <PINMUX_GPIO1__FUNC_GPIO1>; slew-rate = <1>; bias-disable; ----无上下拉设置,不能与bias-pull-down/up共存 output-low; input-schmitt-enable = <0>; }; }; };
驱动中获取pinctrl并进行配置
struct pinctrl* pinctrl0; struct pinctrl_state* config0, *config1, *config2; //获取pinctrl句柄 pinctrl0 = devm_pinctrl_get(&pdev->dev); //根据句柄得到gpio的配置,根据pinctrl-name属性进行匹配 config0 = pinctrl_lookup_state(pinctrl0, "aaa"); config1 = pinctrl_lookup_state(pinctrl0, "bbb"); config2 = pinctrl_lookup_state(pinctrl0, "ccc"); //配置生效 pinctrl_lookup_state(pinctrl0, config0);
标签:direction cti ati mcu output state NPU 图片 技术
原文地址:https://www.cnblogs.com/ant-man/p/9184532.html