标签:vpd 判断 存储方式 数据文件 波形 通道数 二次开发 sha AC
该系统除用于单个目标的识别,还应用于判断目标以外的背景信息,实现特定目的的搜索功能,识别的范围更广、信息含量更大,所需要处理的数据也更多,采集所需图像的同时,还要精确记录方位、时间等多维信息,可以实时回放所采集的图像信息,实现难度大,硬件需求高。图1 触发信号与回波视频信号的时序图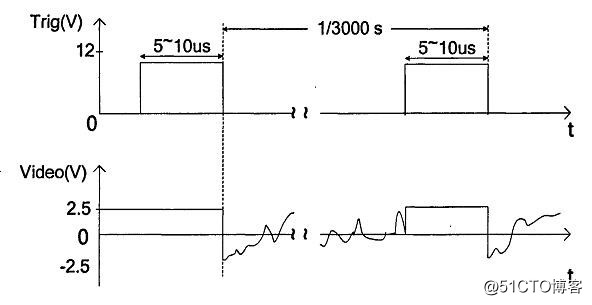
图2 方位信号与0点信号的时序图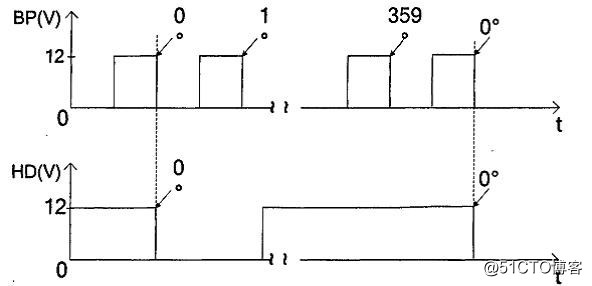
1、2 采集工作原理
设备开机工作后,由触发信号Trig控制开始采集和存储,天线每旋转一圈,会产生一个0点信号(HD)和360个方位信号(BP),每次采集128-130圈,即采集到128-130个0点信号(采集的点数能够在软件上任意设置)。工作时并不是360°方位角全部采集,应能在软件上设置任意角度采集,在采集扇角外的区域内,只数字计数,AD不采集。
1、3 软件要求
1、能够根据用户要求定制采集软件,提供动态链接库,以供用户二次开发;
2、能够设置自动采集和手动采集两种选择;
3、能够对采样率进行分频设定,用户可根据需要自行设置采样率;
4、能够设定每次触发后的采集时间(采集长度);
5、能够任意设置采集的扇角(360°不一定全部采集,根据需要设置采集的扇角)。
6、能够按要求设定数据存储的格式和类型,能够自行设定采样率。
1、4 数据存储要求
1、天线每旋转一圈单独存储一个数据,并在下一圈采集开始之前存储完毕。
2、每次采集,在指定的路径下,自动生成一个以时间命名的文件夹,每一圈存储的数据以时间命名,自动存储在生成的文件夹里,比如设置一次采集130个数,那么这个文件夹里为130个数据文件(每圈一个数据)。
2、高速数据采集模块
n 模拟输入通道数:2通道,多模块可并行扩展
n 每通道最高采样率:可同时达到125MSps;
n A/D分辨率:16Bit
n 输入范围:支持多档输入范围,±0.2V,±0.5V,±1.0V,±2.5V,±5.0V,±10.0V
n 输入信号带宽:0Hz~60MHz
n 增益和零点完全自校准
n 触发方式:手动触发、外触发(可设置上升沿、下降沿)、内触发(上升沿、下降沿、出窗触发、入窗触发),具有触发逻辑或、逻辑与功能
n 触发电平:内触发电平在量程范围内256级程控,外触发电平是TTL电平
n 数据存储方式:板载缓存,2048M字节/张
3、回放雷达信号波形
3.1 视频数据回放
回放波形不但需要还原记录的高速视频信号,还需要还原雷达的时序波形,和按照触发方式同步输出的视频信号。
硬件采用两块卡来完成以上功能:
基于PCIe的高速数据回放卡
n 1通道 625Msps。
n 16bit分辨率。
n 200MHz模拟带宽
n 支持连续分段模式回放无穷大的数据文件。
n PCIE X8 接口。
n 采用外触发trig分段的波形的回放模式: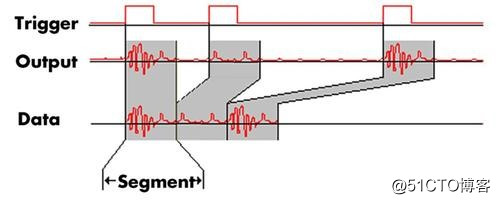
3.2 触发,方位船首信号的回放
l 产生触发信号时序,驱动雷达显示终端。同时对数据回放卡进行外触发。
l 输出具有方位信息和船首信息的RS422信号,用于产生同雷达头等同的时序信号。
更多资料,可访问北京熠新科技案例。
标签:vpd 判断 存储方式 数据文件 波形 通道数 二次开发 sha AC
原文地址:http://blog.51cto.com/13421482/2134994