标签:序列 mod 内核 ade 常用 选择 标志位 例子 比特流
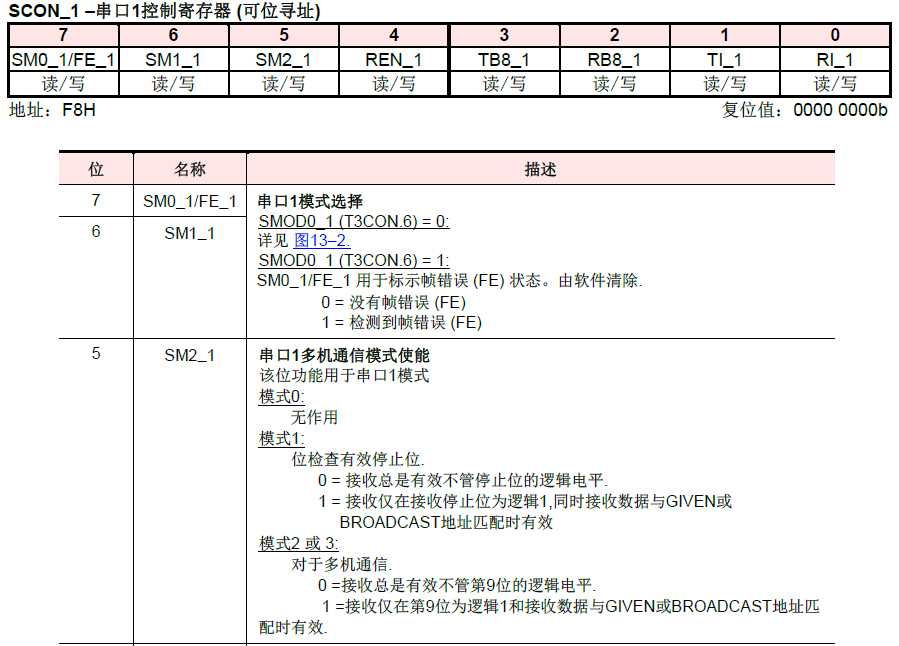
N76E003包含两个具备增强的自动地址识别和帧错误检测功能的全双工串口。由于两个串口的控制位是一样的,为了区分两个串口控制位,串口1的控制位以“_1”结尾(例如SCON_1)。下述详例以串口0为例。
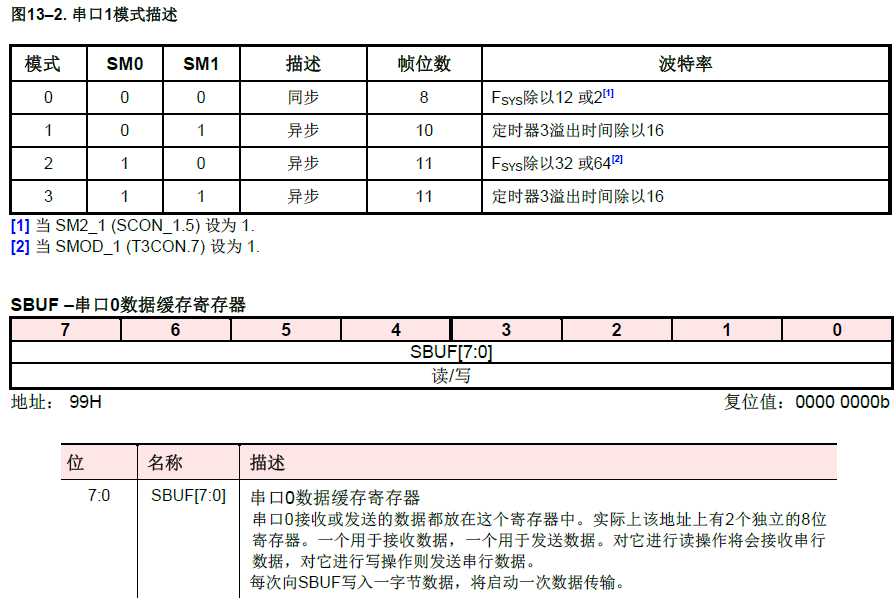
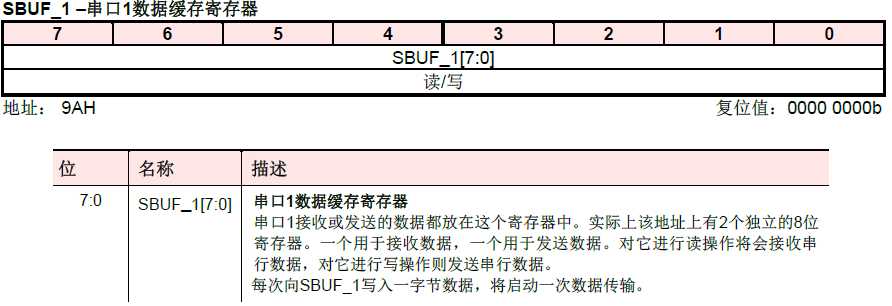
每个串口都有一种同步工作模式:模式0。三种全双工异步模式:模式1,2,和3,这意味着收发可以同时连续进行。串口接收带有接收缓存,意味着在接收的前一个数据在被读取之前,串口就能接收第二个数据。接收和发送都是对SBUF进行操作访问,写入SBUF数据将直接传到发送寄存器,而读取SBUF是访问一个具有独立物理地址的接收寄存器。串口共有4种操作模式,任何一种模式,任何以操作SBUF的指令都将开始一次传输。注意,在使用串口功能前,串口所用管脚P0.7及 P0.6 (RXD 及 TXD引脚) 或者 P0.2及 P1.6 (RXD_1 及 TXD_1)必须先置1。N76E003提供更灵活的管脚配置,可将串口0的TXD及RXD通过UART0PX (AUXR1.2)更改位置。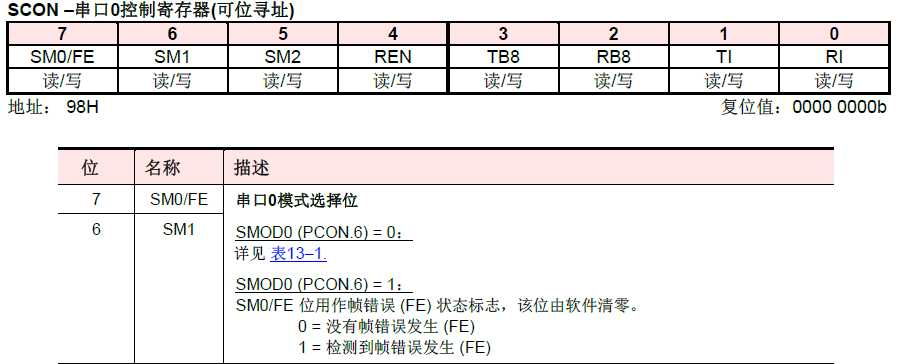


13.1 模式 0
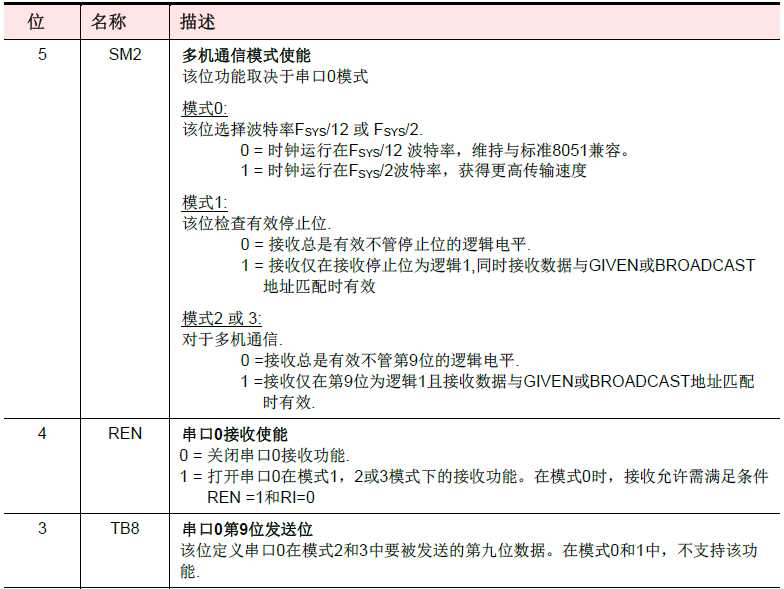
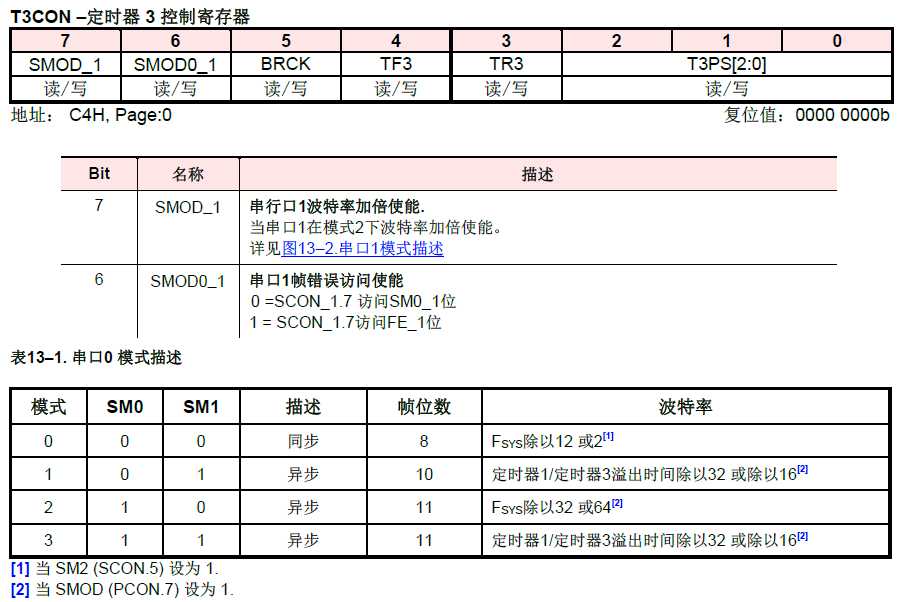
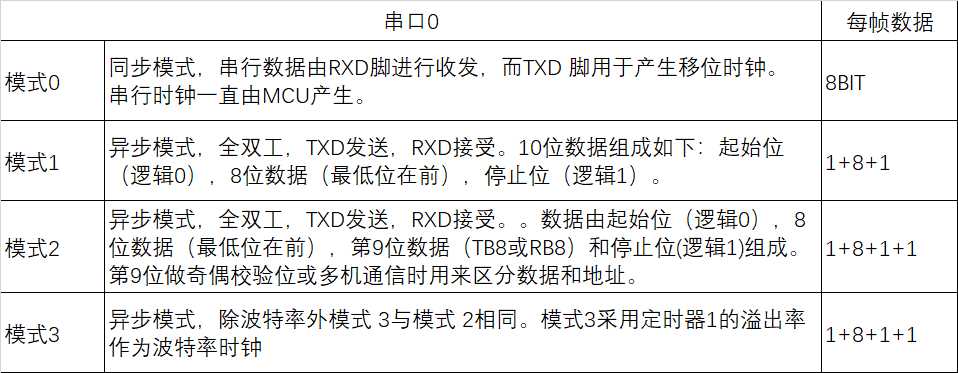
模式0是与外部设备进行同步通信的方式。在该模式下,串行数据由RXD脚进行收发,而TXD 脚用于产生移位时钟。这种方式下是以半双工的形式进行通信,每帧接收或发送8位数据。数据的最低位被最先发送或接收,波特率设置为FSYS/12(SM2 (SCON.5) 为 0) 或 FSYS/2 (SM2 为 1)。无论发送或接收数据,串行时钟将一直由MCU产生,因此串口模式 0 为主机模式。图13?1 显示串口模式0传输时序图
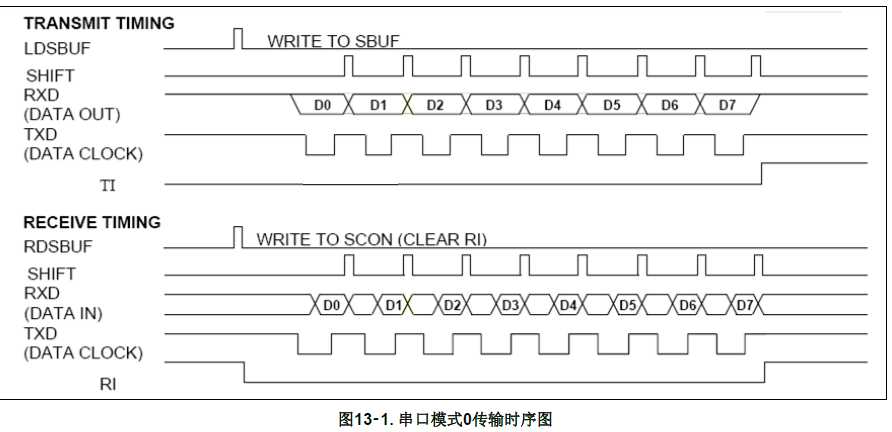
如图所示,数据由双向RXD引脚进行收发,TXD引脚用来输出移位时钟。串口用移位时钟来一位位接收/发送数据与其他串口通讯。数据移入移出由最低位开始,波特率等于TXD的移位时钟频率。
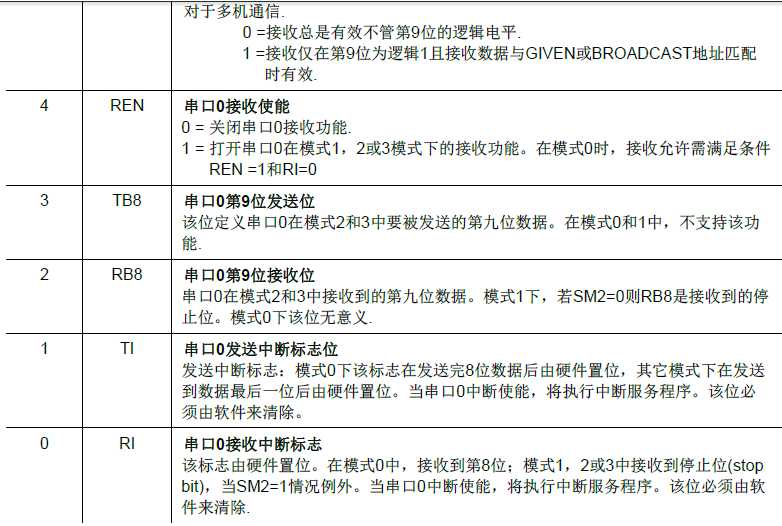
向SBUF的写入数据将会开启发送,此时移位时钟启动数据从RXD脚串行移出,直至8位数据传输完成。传输标志位TI (SCON.1) 置 1表示 1 个字节数据传输完成。
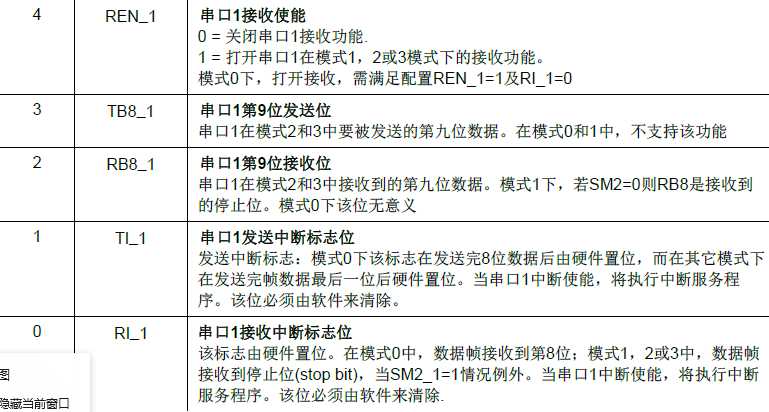
当REN (SCON.4)=1 且 RI(SCON.0)=0 时串口开始接收数据。该条件告诉串口控制器有数据要移位进入。这个过程将持续到8位数据接收完毕,然后接收标志RI将置1。用户可以清零RI,以触发接收下一字节数据。
13.2 模式 1
模式1为异步全双工的工作方式。异步通讯模式通常用于PC间,调制解调器和其它类似接口间通讯。模式1下,10位数据通过TXD发送,通过RXD接收。10位数据组成如下:起始位(逻辑0),8位数据(最低位在前),停止位(逻辑1)。波特率由定时器1决定, SMOD (PCON.7) 设置为1可使波特率加倍.图13?2为串口模式1发送和接收的时序图.
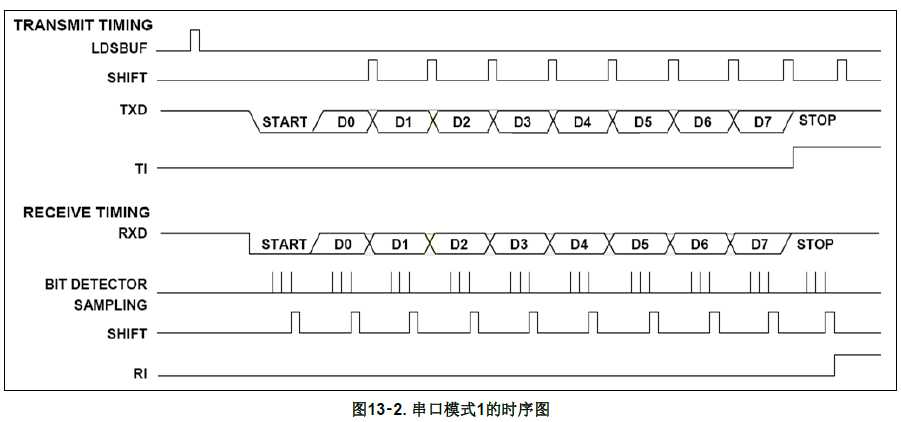
向SBUF写入数据开始传输,传输发生在TXD引脚上。首先是开始位,随后是8位数据位,最后是停止位。停止位出现后,TI(SCON.1)将置1 表示一个字节传输完成,所有位的传输速度取决于波特率。
当波特率发生器激活且REN(SCON.4) =1时,系统可以随时开始接收操作,当RXD脚上侦测到1到0的跳变时,数据将开始被采样并根据波特率的时钟频率接收,停止位必须符合一定的条件,接收到数据才能装载到SBUF:
1. RI (SCON.0) = 0
2. 要么SM2 (SCON.5) = 0, 要么接收到停止位STOP= 1,同时SM2 = 1且被寻址“Given”或符合广播地址(Broadcast address)匹配时。详见 13.7 多机通讯 和 13.8 自动地址识别。
如果上述条件满足,SBUF将加载到接收数据,RB8(SCON.2)为停止位,和RI将被置1,如果条件不满足,RI保持为0,没有数据加载。完成接收过程后,串口控制器将等待RXD脚上出现另一个1-0传输以开始新的数据接收。
13.3 模式 2
模式2为全双工异步通信, 与模式1不同的是,模式2是11位收发。数据由起始位(逻辑0),8位数据(最低位在前),第9位数据(TB8或RB8)和停止位(逻辑1)组成。第9位做奇偶校验位或多机通信时用来区分数据和地址。波特率是系统时钟频率的1/32 或1/64,由 SMOD位(PCON.7)来配置。图13?3 指示串口模式2的传输时序。
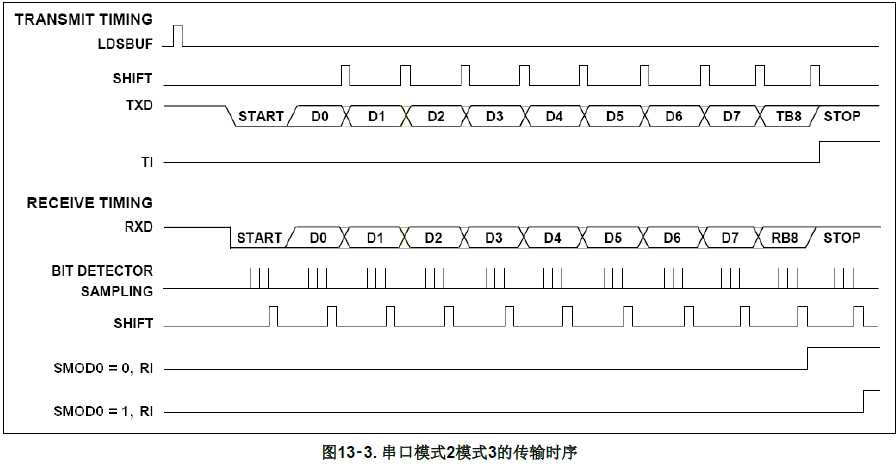
向SBUF中写入数据启动TXD引脚发送,首先是开始位,然后是8位数据和TB8(SCON.3),最后是停止位,停止位发送后,TI将置位标志传输完成。
当REN=1时,串口可进行接收操作。RXD上的下降沿表示接收过程开始,数据根据所配置波特率进行采样和接收。停止位必须符合一定的条件,接收到数据才能装载到SBUF:
1. RI (SCON.0) = 0,
2. 要么SM2(SCON.5) = 0, 要么9th位 = 1同时 SM2 = 1且被寻址“Given”或符合广播地址(Broadcast address)匹配。详见 13.7 多机通讯 和 13.8 自动地址识别。
如果上述条件满足,则第9位数据进入RB8(SCON.2),8位数据进入SBUF,且RI置位。否则数据将不会装载,且RI保持为0。完成接收过程后,串口控制器等待RXD脚上的另一个1-0跳变以开始新的数据接收。
13.4 模式 3
除波特率外模式 3与模式 2相同。模式3采用定时器1的溢出率作为波特率时钟。图13?3 模式3的传输时序,与模式2没有不同。
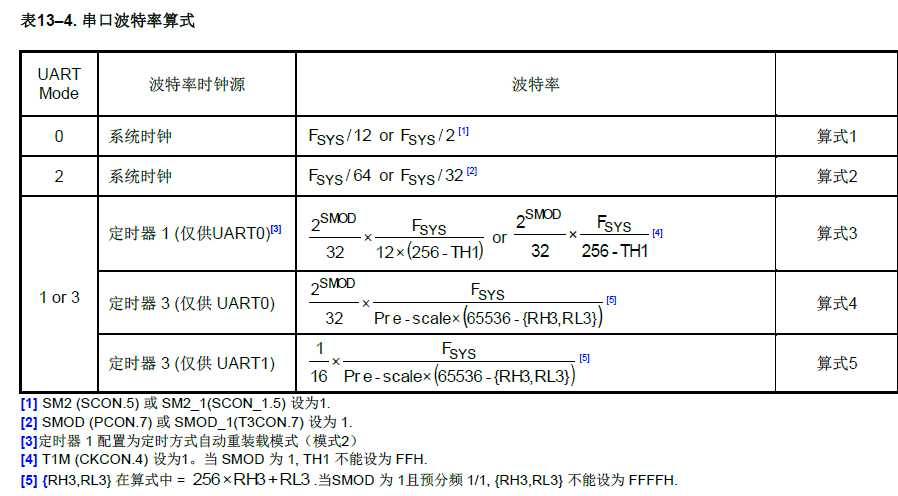
13.5 波特率
串口的不同模式的波特率时钟源和速度是完全不同的。详见表 13–3. 用于设定不同的波特率。
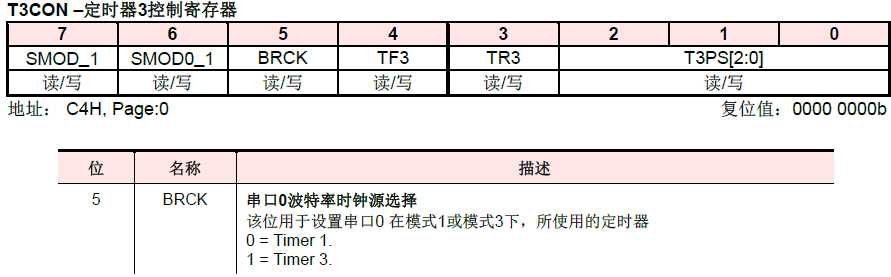
在模式1或模式3,串口0的波特率时钟源可通过BRCK (T3CON.5)选择定时器1或定时器3。对于串口1,只有采用定时器3作为唯一的时钟源。
当采用定时器1作为波特率发生器,需要关闭定时器1中断。定时器1可配置为计数器或是定时器,三种工作模式都可以。典型应用中,会配置为定时器工作在自动重装载模式(定时器模式2)。如果采用定时器3作为波特率发生器,同样也需要关闭定时器3中断。
13.6 帧错误检测
帧错误检测用于异步模式 (模式 1, 2 和 3)。当由于总线干扰或争夺,导致没有检测到有效的停止位时,将发生帧错误。串口可以检测帧错误,并通过软件提示出错。
FE为帧错误标志,位于SCON第7位,这个位正常被用作为SM0 。当SMOD0 (PCON.6)置1时,帧错误检测功能打开,它作为FE标志。SM0和FE其实是相互独立的标志位。
当帧错误发生时,FE标志由硬件置位。如果必要,FE可在串口中断程序中检测。注意在对FE标志位进行读写时,同时SMOD0必须为1。如果FE被置位,那么下次即使接收到的正确数据帧也不会将其清除。对该位的清除必须由软件来完成。
13.7 多机通讯
N76E003串口支持多机通讯,可让一个主机(master device)向多个从机(slave device)发送多帧序列信息。在同一串行线上使用该功能过程中不需要中断其它从机设备工作。该功能只能在模式2或模式3下进行。用户设置SM2(SCON.5)为1打开这个功能,以便当一个数据帧接收后,当第9位为1时,串口中断将产生(模式2下,第9位为停止位)。当SM2为1时,如果第9位为0,不会发生中断。在该情况下,第9位能简单的把从机地址和数据分开。
当主机需要向多个从机中的一个发送数据时,首先需要发送目标从机的地址。注,地址字节与数据字节是不同的:在地址字节中,第9位为1。而数据字节中第9位为0。地址字节会触发所有从机,而每台从机检查接收到的
地址是否与自身匹配。地址匹配的从机,清除SM2,准备接收数据;未被寻址到的从机的SM2 必须保持,从而系统会持续工作,同时忽略接收数据。.
配置多机通信步骤如下:
1. 设置所有设备(主机与从机)为串口模式2或3;
2. 所有从机 SM2 位置为1;
3. 主机传输协议:
– 第一个字节:地址,目标从机地址 (第9位 = 1)
– 下一个字节:数据, (第9位 = 0)。
4. 当目标从机接收到第一个字节, 因为第9位数据为1所有从机将中断。目标从机比较自身地址并且清SM2 位等待接收后面的数据。其它从机则继续正常运行。
5. 接收到所有数据后,置 SM2 为 1 等待下一地址。
SM2 在模式 0 下无效。若 SM2 置 1,模式1可用于检测有效的停止位。同时将不会产生中断除非有效停止位已经接收。
13.8 自动地址识别
自动地址识别功能提高了多机通讯功能,允许UART通过硬件比较,来识别特别的地址信息在接收的比特流中。该功能可以节省软件识别地址而所占用的程序空间,仅当串口识别到自身地址时,接收器置位RI位并请求中断。当多机通信特征使能时(SM2置位),就使能自动地址识别。
如果需要,用户可以在模式1下使能自动地址识别功能。在这种配置下,停止位取代第九位的数据位。仅当接收命令的帧地址与器件地址匹配和有效的停止位时,RI置位。
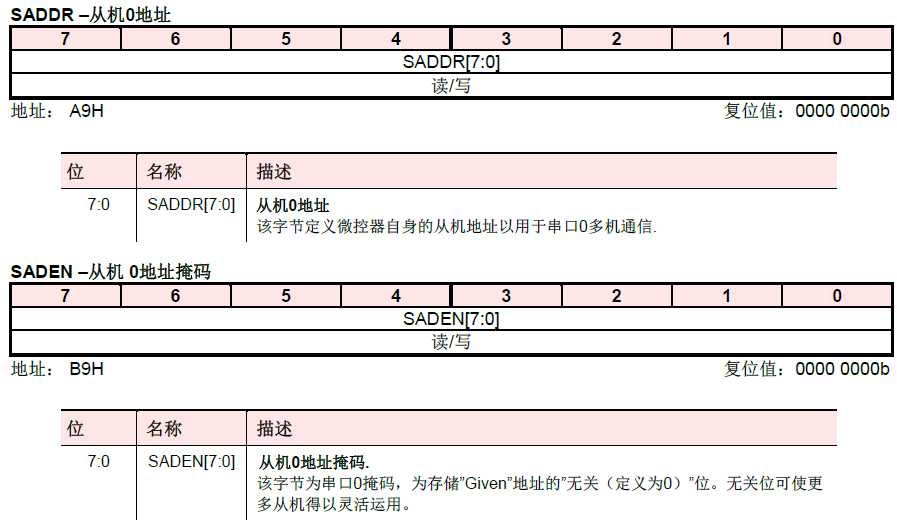
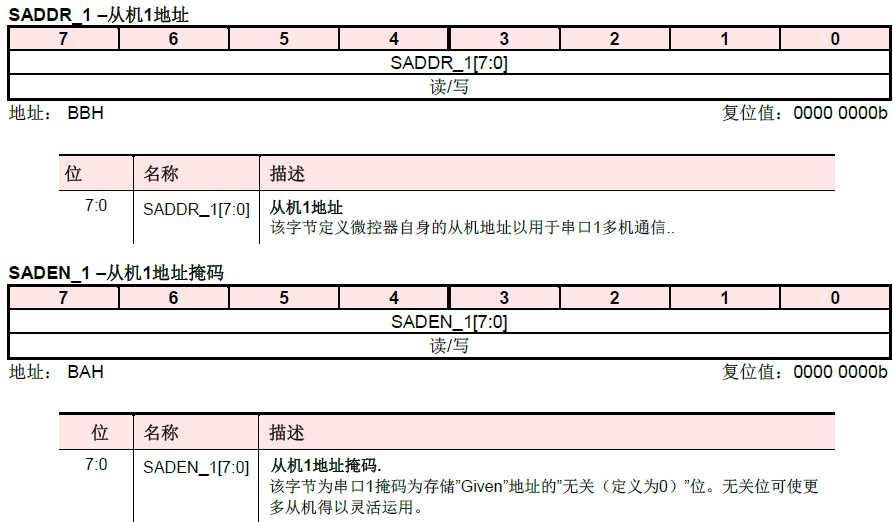
使用自动地址识别功能,允许一个主机通过从机地址选择性与一个或几个从机通信。所有从机可以通过“广播”地址联系。有两个特殊功能寄存器用于定义从机地址 SADDR和从机地址掩码SADEN。 SADEN 用于定义SADDR的哪些位被用,哪些位不必关心. SADEN掩码可以与SADDR以“逻辑与”的方式以创建每个从机的“Given” 地址。使用 “Given”地址允许多从机被识别。
下列范例用以说明该功能的灵活应用
范例 1, 从机 0:
SADDR = 11000000b
SADEN = 11111101b
Given = 110000X0b
范例 2, 从机 1:
SADDR = 11000000b
SADEN = 11111110b
Given = 1100000Xb
在上面的例子中SADDR是相同的,SADEN的数据用于区分两个从机。从机0要求位0为” ”而忽略位1,从机1要求位1为” ”而位0被忽略。一个从机0唯一的地址11000010B,由于从机1要求位1为0。一个从机1唯一的地址将自1位11000001b将排除从机0。这两个从机可以选择在同一时间,地址位0 = 0(从机0)和第1位= 0(从机1)。因此,使用广播地址(Boadcast address) 11000000b就可以同时寻址。
更复杂应用可用于排除从机0之后,选择从机1或2:
范例 1, 从机 0:
SADDR = 11000000b
SADEN = 11111001b
Given = 11000XX0b
范例 2, 从机 1:
SADDR = 11100000b
SADEN = 11111010b
Given = 11100X0Xb
范例 3, 从机 2:
SADDR = 11000000b
SADEN = 11111100b
Given = 110000XXb
在上面的例子中,3个从机的分别是在地址的低3位。从机0要求位0 = 0,它可用11100110b解决。从机1要求位1= 0,它可用11100101b识别。从机2要求位2= 0,其独立的地址是11100011b。要选择从机0和1,去除从机2,可使用地址11100100b,因为它是必要的第2位= 1来排除从机2。
每个从机的“广播”地址的计算是通过逻辑或SADDR和SADEN。结果中的零位被视为“无关”位。例如:
SADDR = 01010110b
SADEN = 11111100b
Broadcast = 1111111Xb
使用“无关”位可在广播模式下,提供更灵活的应用。不过在大部分应用条件下,广播地址全部使用FFH。
复位后,SADDR和SADEN初始化为00H。这将对于所有“无关”地址产生一个“Given”地址,以及一个“广播”地址对应所有XXXXXXXXb地址(所有“无关”位)。这样有效地禁止了自动寻址模式,允许微控制器保持标准串口模式而不使用这个功能。
N76E003属于增强型51内核单片机,一般这种都是提供简单的串口UART使用的。
那么我们先看这个单片机一共几个串口。
手册中提到:N76E003包含两个具备增强的自动地址识别和帧错误检测功能的全双工串口。也就是2个串口。分别叫串口0和串口1.
我们也可以从手册发现每个串口具备4种模式,见下表
官方有提供的例程来操作这两个串口,全部是最常用的模式1
串口0可以使用定时器1或者定时器3产生波特率,并提供了对应的收发函数
串口1可以使用定时器3产生波特率,并提供了对应的收发函数。
基本上大家也用不上其他模式的。常规的应用足够了,我至今还没有用过串口的其他模式。
如果需要,可以参考这个库函数进行对应的寄存器修改。
关于波特率,我在定时器的博客上有描述
标签:序列 mod 内核 ade 常用 选择 标志位 例子 比特流
原文地址:https://www.cnblogs.com/zhugeanran/p/9255167.html