标签:灰度 dem ima win 多个 源码 real store 根据
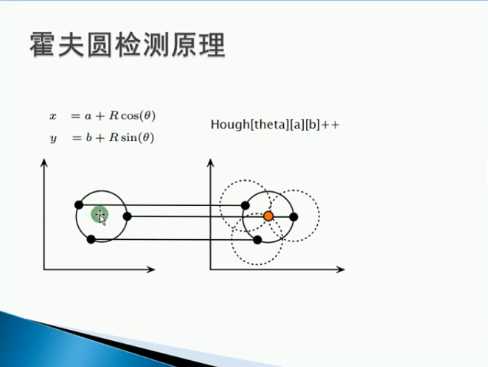
推文:Opencv2.4.9源码分析——HoughCircles


加载一幅图像并对其模糊化以降噪
对模糊化后的图像执行霍夫圆变换 .
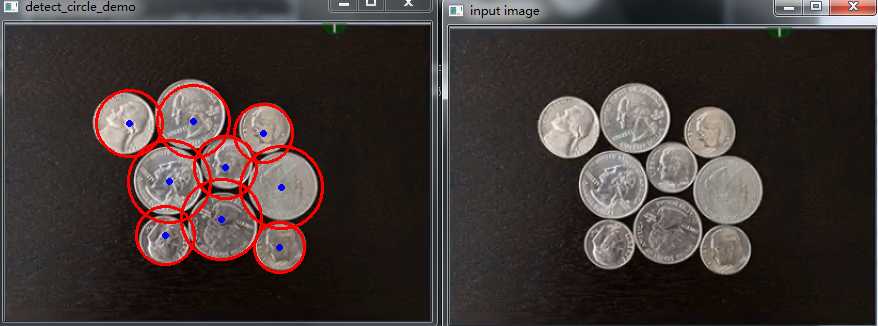
在窗体中显示检测到的圆.
def detect_circle_demo(image): # dst = cv.bilateralFilter(image, 0, 150, 5) #高斯双边模糊,不太好调节,霍夫噪声敏感,所以要先消除噪声 # cv.imshow("1",dst) # dst = cv.pyrMeanShiftFiltering(image,5,100) #均值迁移,EPT边缘保留滤波,霍夫噪声敏感,所以要先消除噪声 # cv.imshow("2", dst) dst = cv.GaussianBlur(image,(13,15),15) #使用高斯模糊,修改卷积核ksize也可以检测出来 # cv.imshow("3", dst) gray = cv.cvtColor(dst,cv.COLOR_BGR2GRAY) circles = cv.HoughCircles(gray,cv.HOUGH_GRADIENT,1,20,param1=50,param2=30,minRadius=0,maxRadius=0) circles = np.uint16(np.around(circles)) #around对数据四舍五入,为整数 for i in circles[0,:]: cv.circle(image,(i[0],i[1]),i[2],(0,0,255),2) cv.circle(image,(i[0],i[1]),2,(255,0,0),2) #圆心 cv.imshow("detect_circle_demo",image) src = cv.imread("./c.png") #读取图片 cv.namedWindow("input image",cv.WINDOW_AUTOSIZE) #创建GUI窗口,形式为自适应 cv.imshow("input image",src) #通过名字将图像和窗口联系 detect_circle_demo(src) cv.waitKey(0) #等待用户操作,里面等待参数是毫秒,我们填写0,代表是永远,等待用户操作 cv.destroyAllWindows() #销毁所有窗口
1.加载一幅图像 2.执行高斯模糊以降低噪声:GaussianBlur 3.转成灰度图:cvtColor 4.执行霍夫圆变换:HoughCircles
def HoughCircles(image, method, dp, minDist, circles=None, param1=None, param2=None, minRadius=None, maxRadius=None): # real signature unknown; restored from __doc__
cv.HoughCircles(gray,cv.HOUGH_GRADIENT,1,20,param1=50,param2=30,minRadius=0,maxRadius=0)
1.image:输入图像 (灰度图) 2.method:指定检测方法. 现在OpenCV中只有霍夫梯度法 3.dp:累加器图像的反比分辨=1即可默认 4.minDist = src_gray.rows/8: 检测到圆心之间的最小距离,这是一个经验值。这个大了,那么多个圆就是被认为一个圆。 5.param_1 = 200: Canny边缘函数的高阈值 6.param_2 = 100: 圆心检测阈值.根据你的图像中的圆大小设置,当这张图片中的圆越小,那么此值就设置应该被设置越小。当设置的越小,那么检测出的圆越多,在检测较大的圆时则会产生很多噪声。所以要根据检测圆的大小变化。 7.min_radius = 0: 能检测到的最小圆半径, 默认为0. 8.max_radius = 0: 能检测到的最大圆半径, 默认为0
标签:灰度 dem ima win 多个 源码 real store 根据
原文地址:https://www.cnblogs.com/ssyfj/p/9275977.html