标签:制度 其他 流行 团队 经验 电池 width 实现 更换
磁钉导航AGV实验
2016-03
本机器是采用RFID电子地标配合磁钉传感器的定位导航AGV。本AGV已初步实现里程计精确解算,磁钉数据融合,AGV定点精准停车、原地旋转换向、远程无线调度的功能,初步达到协定的第一阶段研发期望效果。
|
序号 |
物料名称 |
价格(元) |
数量 |
供应商 |
|
1 |
主控板 |
|
1 |
(arm) |
|
2 |
磁导航传感器 |
|
1 |
自主研发 |
|
3 |
电机 |
|
2 |
德恩科 |
|
4 |
电机驱动板 |
|
2 |
|
|
5 |
RFID射频模块 |
|
1 |
|
|
6 |
WIFI模块 |
|
1 |
|
|
7 |
开关电源模块3V3/5V0 |
|
1 |
|
|
8 |
开关电源模块24V |
|
2 |
|
|
9 |
底盘 |
|
1 |
新美星厂制 |
|
10 |
电机支架 |
|
2 |
新美星厂制 |
|
11 |
承重轮 |
|
2 |
(新美星二次加工) |
|
12 |
万向轮 |
|
2 |
|
|
13 |
万向轮支架 |
|
2 |
新美星厂制 |
|
14 |
AGV主控程序 |
|
1 |
自主研发 |
|
总计 |
|
|
|
元 |
另外场地所需物料主要为磁钉、RFID电子标签ID。
|
序号 |
物料名称 |
价格(元) |
数量 |
供应商 |
|
1 |
磁钉 |
|
# |
|
|
2 |
RFID电子标签ID卡 |
|
# |
|
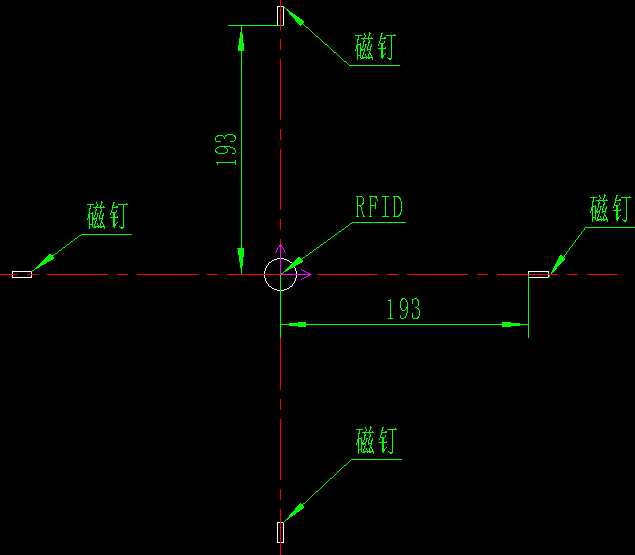
场地铺设磁钉与电子标签共同配合,供AGV定位导航使用,磁钉离原地旋转中心必须193mm,磁钉分NS极,极性保持与实验室一致电子标签铺设于旋转中心,铺设要求如下图:
开机后35S机器准备就绪,连接上路由器,调度系统可以与AGV实现数据交换,AGV向调度系统发送当前地标信息,格式为(A-ID=)+(10位卡号),例如:A-ID=0009350943。
测试上位机系统根据协议分别发送调度命令。
|
序号 |
指令 |
描述 |
|
0 |
‘0’ (0x30) |
减速停车 |
|
1 |
‘1’ (0x31) |
原地左转直角 |
|
2 |
‘2’ (0x32) |
原地右转直角 |
|
3 |
‘3’ (0x33) |
加速直行 |
|
4 |
‘4’ (0x34) |
急刹车 |
|
5 |
‘5’ (0x35) |
定点停车 |
原地左转直角,完成后小车自动高速直行向前;
原地右转直角,完成后小车自动高速直行向前;
定点停车,提前一个地标发送定点停车,小车将在下一点精准停车,接受调度指令并存储该条指令,精准定点停车完成后,才会执行下一指令;
|
项目 |
描述 |
|
尺寸 |
W*L*H=400*400*X; |
|
载重 |
15KG,稳定运行重量(最大载重待验证) |
|
电池 |
18650锂电池组,预计连续工作6小时以上(待验证) |
|
速度 |
1m/s,稳定运行速度 |
|
行走 |
沿轨道直线行走(一般描述为行走200M无偏差); 原地旋转直角(一般描述为旋转90度3025个脉冲无误差); 定点精准停车(一般描述为停车精度正负5mm以内); |
先后共得经费支持*元,先后共花费经费*元。(详见经费管理明细表)
当前电控为手工电路,电路之间经常抗干扰性差,电磁稳定性差,常造成单片机复位失控问题。电控设计工作由我负责,将面条电路(所有模块之间连接使用飞线)整合到一块电路板上,主控原理集成到电路板上,形成AGV控制板,并长期对性能与稳定性负责改进。该项工作初期保守估计用时1个月及经费*元。
该电控板可移植为各种功率直流有刷驱动电机节点型磁钉导航AGV。该电控板也可修改为二维码导航,直流无刷驱动电机等AGV,而不需要修改主控电路。
主控程序具有很强的可移植性,主要依赖于AGV行业控制程序的共通性,方便未来开发高负荷移动AGV。
控制算法:里程计解算(姿态,角速度,线速度),磁钉定位校准,模糊PID,滑膜控制。
建议AGV车体设计参照模块化思想,可以用于装配不同的移栽结构。
1) 移栽结构设计工作
最好考虑移栽双向性,即双向灵活卸货,结构量轻简洁,模块化装配。
2) RFID标签注意事项
RFID电子标签可以设置在车底盘偏前,这样利于提前降速定点停车的稳定性。
当前选择的磁钉和RFID标签都在清单中列出。当前RFID标签的读卡速度较慢,使得AGV速度限制在2m/s。
建议选择IC卡,这种卡的读卡速度较快,能达到2m/s以上。
3) 万向轮设置问题
当前万向轮设置在车体中心线上,前后各一个,存在压到磁钉或电子标签的问题,影响RFID读取稳定性,车体行走稳定性,限制速度的提升。
设置4个万向轮,前后各两个,左右对称,避免万向轮与磁钉或电子标签接触,有利于AGV姿态的稳定及速度的提升。
通过观察物流行业动态,货架载重机器人需求很大,市场很好,能研发出一台货架机器人,掌握机器人核心控制和生产技术,因为物流搬运机器人控制技术是通的,只是更换一种应用形式而已。
1) 研发路线
借鉴低载重AGV研发经验,建议货架机器人研发路线为,方案制定、车体结构设计(机械、功能面面俱到、可参考其他厂家)、电控设计(融合机械功能)、程序算法开发调试、AGV工业设计。
经验证明以上研发路线是最合理的,最少走弯路的,最节省时间的,最少麻烦的,产品最快成型成熟的。
另外,借鉴同行经验,车体结构设计建议采用无刷直流电机,工作电压36V或48V,功率根据负载来计算。
关于导航方式,建议开发两种配置供市场选择,一种是二维码导航,一种是磁钉、RFID地标组合导航。
前一种地面较为整洁,市场上接触过的所有都是采用这种方式,智能二维码传感器功能很强,上手开发较为简单,但二维码容易受污染,二维码传感器成本高昂。市场竞争力在于谁做的更稳、更快、更便捷,然后更便宜。
后一种成本低,适用于1.5m/s以下速度的机器人,这一种方案,目前在市场上没见过,且磁钉传感器自主研发,量产在成本上肯定有竞争优势,新美星有过此种导航方式经验,开发有经验技术可复制。
2) 团队建设管理
研发团队建设,要有嵌入式系统工程师角色(硬软件技术啥都成熟),机械工程师角色。
有团队研发目标、团队中有个人研发目标,要有一个人对团队目标负责并接受奖惩,要有合理的研发团队管理、绩效考核、激励、淘汰制度。让人才能通过奖惩激励更直观的看到自己工作的质量,成果收益,能推动并维持人才的工作努力程度和创新热情。
物流机器人属于复杂的嵌入式技术产品,需要研发人员超乎寻常的努力、富有热情的创新研发工作、自愿绞尽脑汁想办法解决问题,才能更好更快的将产品做强。
标签:制度 其他 流行 团队 经验 电池 width 实现 更换
原文地址:https://www.cnblogs.com/agvcfy/p/9282131.html