标签:configure 各类 ice Plan line color 实例 add nod
Android Camera System
Android Camera硬件抽象层(HAL,Hardware Abstraction Layer)主要用于把底层camera drive与硬件和位于android.hardware中的framework APIs连接起来。Camera子系统主要包含了camera pipeline components 的各种实现,而camera HAL提供了这些组件的使用接口。
注:camera HAL起着承上启下的作用。在camera HAL层实现中,芯片厂商一般将camera HAL层的实现分为两层:interface层和OEM层。OEM层为下层,它用于屏蔽不同的camera硬件。不同的camera硬件必须支持OEM层提供的对外接口。Interface层为上层,它调用OEM层的对外接口来实现camera HAL所定义的接口。对于Interface层,它并不知道底层camera硬件到底是哪一个版本。同时,interface层完成了屏蔽camera HAL版本的作用。对于OEM层,它也不知道上层是哪一个camera HAL版本,及android版本。两层分离架构,可以很容易地实现不同芯片支持同一个android版本和同一款芯片支持不同android版本(前提条件是该款芯片能够支持这些android版本的各个需求)。
下图所示为Android官方给出的Camera System架构。
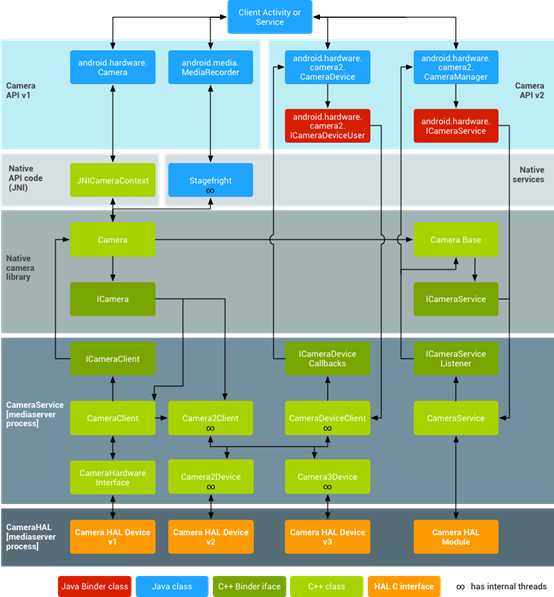
图 1 Android Camera System Architecture
从图 1中可以看出,Camera System主要包含如下几个重要组成部分:
Application framework层主要是应用代码(app‘s code),这个代码主要利用android.hardware.Camera API与Camera硬件进行交互。这些代码调用相关的JNI类来访问与Camera进行交互的原生代码(native code)。
与android.hardware.Camera有关的JNI代码主要frameworks/base/core/jni/ android_hardware_Camera.cpp。这些代码调用下一层的原生代码以获得物理camera的访问权,然后返回用于在framework层创建android.hardware.Camera对象的数据。
Native framework的定义位于 frameworks/av/camera/Camera.cpp中,它提供了android.hardware.Camera类在本地的实现。这些类调用IPC binder来获得camera service。
IPC binder代理可以现实进程间通信。在frameworks/av/camera目录下有三个camera binder类的定义。ICameraService是cameraservice的接口,ICamera是被打开的camera设备的接口,ICameraClient是camera设备返回给application framework层的接口。
Camera service位于frameworks/av/services/camera/libcameraservice/CameraService.cpp,它是与HAL直接进行交互的真正代码。
硬件抽象层定义了一套标准接口,你必须实现这些接口,以保证你的APP能够与你的Camera硬件正确的协调工作,从而使保证你的Camera的所有功能能够正常进行工作。以下是google原文:
The hardware abstraction layer defines the standard interface that the camera service calls into and that you must implement to have your camera hardware function correctly.
Camera驱动向下与真实的camera硬件进行交互,向上与HAL实现进行交互。Camera硬件和驱动必须能够提供YV12和NV21格式的图像数据,以支持camera图像数据在显示屏上的预览和视频录制。
注:YV12是YUV420P,三个plane,即Y,V,U三个plane依次存储,如:YYYYYYYY VV UU;NV21是YUV420SP,两plane,即Y,VU作为两个plane存储,且VU交织,即一个V,一个U,依次存储,如:YYYYYYYY VUVU。
HAL层位于camera驱动和上层Android framework层之间,它定义了一些标准接口,你必须正确地实现这些接口,以保证你的APP能够正确的操作你的camera硬件进行正常工作。HAL接口定义位于hardware/libhardware/include/hardware/camera.h 和hardware/libhardware/include/hardware/camera_common.h头文件中。
camera_common.h文件定义了一个重要的struct——camera_module。camera_module定义了一套标准结构以获取与camera相关的基本信息,比如ID和一些camera的基本属性等,如是否为前置或后置camera等。
Camera.h则包含了与android.hardware.Camera相关的代码。该头文件声明了camera_device结构体,camera_device结构体包含一个camera_device_ops结构体,camera_device_ops结构体包含了指向HAL接口实现函数的函数指针。开发者可以查看frameworks/av/include/camera/CameraParameters.h 文件以了解更多不同类型的camera参数的相关文档。这些参数都通过HAL中的 int (*set_parameters)(struct camera_device *, const char *parms) 函数指针进行设置。
关于HAL实现的一个例子,可以查看Galaxy Nexus HAL的实现,它位于hardware/ti/omap4xxx/camera。
你必须设置Android的build system以保证将自己的HAL实现打包进一个共享库(shared library),然后通过创建一个android.mk文件来将其复制到一个合适的目录中,这主要包含如下几个步骤:
LOCAL_MODULE := camera.<device_name>
LOCAL_MODULE_RELATIVE_PATH := hw
注意,你的library必须按如下格式进行命名:camera.<device_camera>(.so会自动添加)。这样Android才可以正确的加载你的library。可以查看Galaxy Nexus camera的例子了解具体情况,例子位于hardware/ti/omap4xxx/Android.mk。
PRODUCT_COPY_FILES := \ ...
PRODUCT_COPY_FILES += \
frameworks/native/data/etc/android.hardware.camera.flash-autofocus.xml:system/etc/permissions/android.hardware.camera.flash-autofocus.xml \
可以查看device/samsung/tuna/device.mk这个例子。
# media config xml file
PRODUCT_COPY_FILES += \
<device>/<company_name>/<device_name>/media_profiles.xml:system/etc/media_profiles.xml
# media codec config xml file
PRODUCT_COPY_FILES += \
<device>/<company_name>/<device_name>/media_codecs.xml:system/etc/media_codecs.xml
PRODUCT_PACKAGES := \
Gallery2 \
...
Android硬件抽象层(Hardware Abstraction Layer,HAL)向上连接camera framework 层APIs,向下连接底层Camera驱动和硬件。最新版的Android引进了一种全新的camera stack底层实现方案。如果你有之前开发的适用于老版本Android的camera HAL module和驱动,那么注意了,因为新版本与老版本在camera pipeline的实现上面有非常大的改动。
由于很多设备仍然依赖于老版本的camera HAL,因此,未来的Android发布版本依然会支持第一版的camera HAL。Android camera service也支持同时实现两种HAL,这种设计有一定的好处,比如你想使用HAL v1支持一个能力比较有限的前置camera,同时使用HAL v3支持一个具有强大功能的后置camera,此时这种设计就有了用武之地。HAL v2是v1向v3的一个过渡版本,将不在支持。
系统中只会有一个camera HAL module(这个module拥有自己的版本号,当前是1、2或2.1),该module可以维护多个独立的camera device,每个device都会有自己的版本号。Camera module v2或更新版本的module会支持device v2及更新的版本,这个 camera module可以支持多个不同版本的camera device。这也就是我们为什么说Android支持两个HAL的实现。
注意:新的camera HAL仍然处于开发过程中,以后随时有可能改变,本文只是从一个比较高的层面来介绍camera 子系统的设计和结构,忽略了很多细节的东西。
第1版的camera subsystem被设计成由顶层控制黑箱结构。简单的说,老的camera子系统有3种操作模式:
每种模式都有所不同,也有一定的功能重叠。这使得很以后在功能扩展方面变得比较困难,比如说burst mode,它属于上面三种中的两种。
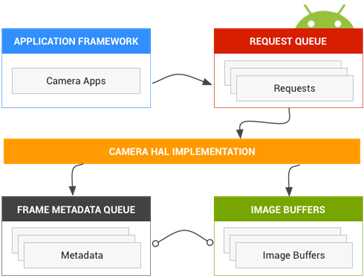
图 2 Camera components
重新设计Camera API的目的是从本质是提升Android应用对Android设备上Camera Subsystem的控制能力,同时确保Camera API的可维护性。
加强控制能力主要为了在Android设备上为开发出更高质量的camera应用,尽可能地利用设备最大性能,提升应用的使用效果与用户体验。
第3版的camera子系统将所有的操作模式都归一成一个单一的视图,这种视图可以实现之前的斜体一种模式,也可以方便地进行模式扩展。这样做的好处是用户可以更加灵活的控制对焦、曝光和一些后续的处理,如降噪、对比度和锐化等。此外,简化的视图使得应用开发者可以使用camera的不同功能。新的API将camera子系统建立成一种pipeline,将捕获帧的输入请求转换为帧,以1:1的方式。该请求封装了所有关于捕获和处理一帧的配置信息,主要包括:分辨率、像素格式,手动控制sensor、lens和flash,3A制作模型,RAW转YUV处理控制等等。
举个简单的例子,application framework向camera subsystem请求一帧,camera subsystem返回一个输出流作为结果。另外,metadata包含了如颜色空间、镜头阴影等信息,每一个返回结果都会包含这些信息,下面的图表会详细介绍每个一个组件。
你可以将Camera v3想象成一个pipeline,它将每一个拍照请求转化为sensor捕获的一帧图像,其处理如下:
可能的输出surface被预先配置:
一个请求包含了所有拍照的配置,输出surface的列表被添加到图像buffer中(所有被配置的单元的输出)。一个请求可能只发送一次,也有可能会被多次发送。拍照优先于被重复发送的请求。
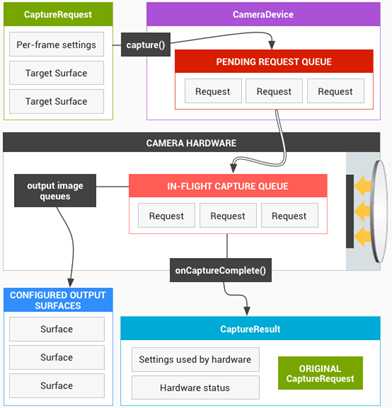
图 3 Camera core operation model
支持camera HAL v3版本的camera设备,在camera_device_t.common.version和camera_info_t.device_version (来自于camera_module_t.get_camera_info)中,必须返回CAMERA_DEVICE_API_VERSION_3_1。包含v3.1设备的camera模块至少需要实现camera模块接口的v2.0版本(由camera_module_t.common.module_api_version定义)。
Application framework层向camera子系统发出一系列捕获数据的请求。一个请求对应于结果中的一个单元。请求封装了这些结果关于捕获数据和处理数据的所有配置信息。这些信息包括:分辨率,像素格式,sensor调整,镜头和闪光灯控制,3A操作模式,RAW转YUV处理,统计信息产生,等等。这里考虑了很多关于对结果数据的输出和处理的控制。多个请求可以一次性发出,提交请求是非阻塞模式。这些请求总是按照被接收到的顺序来处理。
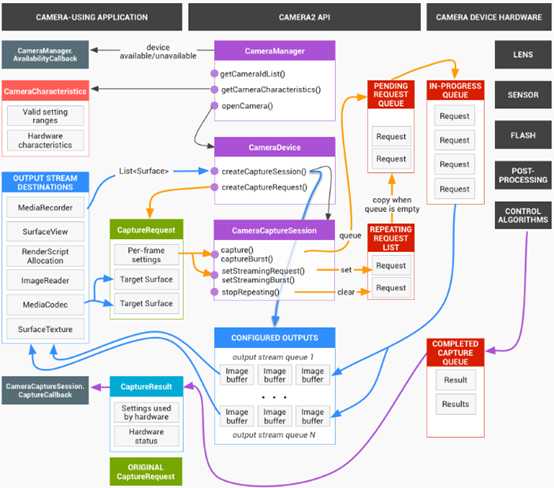
图 4 Camera model
Camera子系统包括camera流水线上各个组件的实现,比如3A算法及其处理控制。Camera HAL层为你实现这些组件提供了接口。为了保持对多个设备制造商和图像信号处理器(ISP,或者camera sensor)供应商之间的跨平台兼容性,camera流水线模块是虚拟的,并没有直接对应任何真实的ISP。但是,它与真实的处理流水线很相似,以便你能够高效地将它映射到你的硬件。另外,它很抽象,在质量,性能或者跨设备兼容性方面,不需要任何妥协就可以支持多个不同算法和操作指令。
The camera pipeline also supports triggersthat the app framework can initiate to turn on things such as auto-focus. Italso sends notifications back to the app framework, notifying apps of eventssuch as an auto-focus lock or errors.
Camera流水线也支持触发器,app framework能够初始化并打开它,比如自动聚焦。它也能向app framework发送通知,通知app关于自动聚焦被锁或者错误的事件。
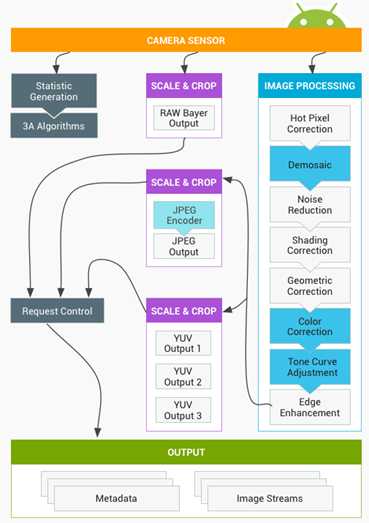
图 5 Camera pipeline
请注意,在最初发布的版本中,上述图表中的一些图像处理模块并没有被很好地定义。Camera pipeline做了如下的假设:
注:数字变焦是根据变焦倍数,从原始图像中裁剪一部分,然后放大到原始分辨率。由于是使用缩放算法直接放大的,所以其图像质量会降低。上图有三个缩放/裁剪单元,但它们共用一个输出控制器,即request control,由它来决定输出到外部缓冲区。根据application framework层的需求,最上面的缩放/裁剪单元会对从raw sensor采集的数据进行裁剪和缩放,最后输出到外边缓冲区。中间和下面的缩放/裁剪单元都是对ISP处理之后的YUV数据进行处理。中间的单元对YUV进行裁剪并缩放后,调用JPEG编码器对其进行编码,输出JPEG图像。下面的单元对YUV进行裁剪并缩放后,输出不同分辨率的YUV数据。这三个缩放/裁剪单元对输入数据也可以不进行裁剪和缩放处理。
API使用总结
这是android camera API使用步骤的简单总结。查看" Startup and expected operation sequence"可以获得这些步骤的详细分解,以及API的调用。
HAL层操作总结
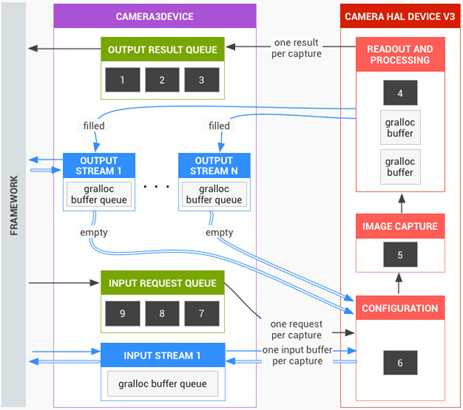
图 6 Camera HAL overview
这段描述了使用camera API的详细步骤。其中涉及到的结构体和函数请参考文件:platform/hardware/libhardware/include/hardware/camera3.h
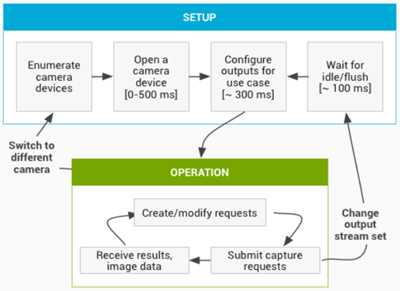
图 7 Camera operational flow
Camera HAL层v3版本的设备实现两种可能的操作模式之一:limited模式和full模式。新的高端设备预计会支持full模式。Limited模式与camera HAL层v1版本一样,对硬件需求很低,用于旧的或者低价设备。Full模式是limited模式的超集,如上面所述,它们有着基本上一样的操作流程。
Camera HAL层必须使用静态元数据android.info.supportedHardwareLevel指明其所支持的模式。0表示支持limited模式,1表示支持full模式。
简单来讲,limited模式设备不允许应用程序控制捕获数据信息的设置(3A控制除外),大分辨率图像的高帧率捕获,raw数据的获取,或者上面所说的最大视频分辨率的YUV输出流(对于大图像只支持JPEG)。
Limited模式行为的细节如下:
根据3A控制模块的配置,camera流水线会忽略应用程序请求中的一些参数,而使用3A控制模块提供的值代替。例如,当自动曝光开启时,曝光时间,帧率,sensor的敏感参数都由3A算法控制,应用程序提供的值全被忽略。3A事务为帧所设置的参数值必须包含在输出的元数据中。下面的表格描述了3A模块的不同模式和被这些模式所控制的属性。属性的定义见文件platform/system/media/camera/docs/docs.html。
|
Parameter |
State |
Properties controlled |
|
android.control.aeMode |
OFF |
None |
|
ON |
android.sensor.exposureTime android.sensor.frameDuration android.sensor.sensitivity android.lens.aperture (if supported) android.lens.filterDensity (if supported) |
|
|
ON_AUTO_FLASH |
Everything is ON, plus android.flash.firingPower, android.flash.firingTime, and android.flash.mode |
|
|
ON_ALWAYS_FLASH |
Same as ON_AUTO_FLASH |
|
|
ON_AUTO_FLASH_RED_EYE |
Same as ON_AUTO_FLASH |
|
|
android.control.awbMode |
OFF |
None |
|
WHITE_BALANCE_* |
android.colorCorrection.transform. Platform-specific adjustments if android.colorCorrection.mode is FAST or HIGH_QUALITY. |
|
|
android.control.afMode |
OFF |
None |
|
FOCUS_MODE_* |
android.lens.focusDistance |
|
|
android.control.videoStabilization |
OFF |
None |
|
ON |
Can adjust android.scaler.cropRegion to implement video stabilization |
|
|
android.control.mode |
OFF |
AE, AWB, and AF are disabled |
|
AUTO |
Individual AE, AWB, and AF settings are used |
|
|
SCENE_MODE_* |
Can override all parameters listed above. Individual 3A controls are disabled. |
所列的3A算法的控制大部分都是与旧的API参数一一匹配(例如曝光补偿,场景模式,或者白平衡模式)。
图2中的图像处理模块的控制都是基于一个相似的原则,通常每个模块有三中模式:
一个camera子系统能够支持的最大帧率是多个元素的函数:
因为对于不同的ISP和sensor,这些因子有很大的变化,camera HAL层接口想要抽象一个尽可能简单的带宽限制模型。这个模型有如下特性:
Android framework层为了支持保存raw图像文件,增加了大量关于sensor特性的元数据。这些元数据包括大量信息,例如颜色空间和lens shading。
在camera子系统中,大多数元数据信息都是以静态属性的方式存在,因此在配置输出流水线或者提交请求之前获取这些元数据。在新的camera API中,通过getCameraInfo()方法向application极大地扩展了这些元数据信息。
另外,camera子系统的手动控制需要各类设备提供关于设备当前状态和捕获当前帧时所用的参数的反馈。硬件所使用的实际参数值(曝光时间,帧周期,敏感度)必须包括在输出的元数据中。这些信息对application是必须的,它可以知道clamping 或rounding何时发生,修正图像捕获的配置。
例如,如果application在某个请求中设置的帧周期是0,HAL层必须将那个请求中的帧周期强制为真正的最小帧周期,然后将这个最小周期添加到输出结果的元数据中。
如果一个application要实现定制的3A事例(例如,HDR burst的某些检测),它需要知道所返回的结果中最新一帧的配置信息,以更新下一个请求的配置。因此,新的camera API为每一个捕获的帧添加了大量动态元数据。这些元数据包括这次捕获时设置的和实际使用的参数值,也包括每帧其他的元数据,比如时间戳和统计数据。
对于大多数设置,期望它们能够在每一帧都被改变,对输出帧数据流不会引入明显的卡顿或者延迟。理想情况下,输出帧率只受请求中帧周期字段的控制,不依赖于处理模块配置的改变。实际上,一些特殊控制可以使其变慢;这些控制包括camera流水线的输出分辨率和输出格式,以及影响物理设备的控制,例如镜头焦距。对于每个控制,精确的需求如下描述。
除了旧API所支持的像素格式,新的API增加了对raw sensor数据(Bayer RAW)的支持,高级camera application还支持raw图像文件的保存。
虽然HAL层负责实现3A算法,但HAL interface定义了一个高层次的状态机描述,允许HAL层设备和framework层交流3A当前状态和3A事件的触发情况。
当设备被打开时,所有3A状态都应该是STATE_INACTIVE。码流配置不需重置3A。例如,需要通过调用configure()来修改固定焦点。
要触发3A行为,需要为下一个请求简单地设置相关触发器实体,以引导触发器的启动。例如,启动自动聚焦的触发器需要在一个请求中将ANDROID_CONTROL_AF_TRIGGER设置为ANDROID_CONTROL_AF_TRIGGER_START。停止自动聚焦需要将ANDROID_ CONTROL_AF_TRIGGER设置为ANDROID_CONTRL_AF_TRIGGER_CANCEL。否则,实体不存在或者被设置为ANDROID_CONTROL_AF_TRIGGER_IDLE。每个请求对触发器设置一个非IDLE的值,都会引发一个独立的触发器事件。
在顶层,通过设置ANDROID_CONTROL_MODE控制3A。可以选择没有3A(ANDROID_CONTROL_MODE_OFF),自动模式(ANDROID_CONTROL_MODE_AUTO)和场景模式(ANDROID_CONTROL_USE_SCENE_MODE)。
Main metadata entries:
Main metadata entries:
Additional metadata entries:
Main metadata entries:
Additional metadata entries:
在切换AF,AE和AWB的不同模式是总会将算法的状态重置为INACTIVE。同样地,在CONTROL_MODE和CONTROL_SCENE_MODE(CONTROL_MODE == USE_SCENE_ MODE)之间切换时,也需要将算法的状态重置为INACTIVE。
|
mode = AF_MODE_OFF or AF_MODE_EDOF |
|||
|
State |
Transformation cause |
New state |
Notes |
|
INACTIVE |
AF is disabled |
||
|
mode = AF_MODE_AUTO or AF_MODE_MACRO |
|||
|
State |
Transformation cause |
New state |
Notes |
|
INACTIVE |
AF_TRIGGER |
ACTIVE_SCAN |
Start AF sweep Lens now moving |
|
ACTIVE_SCAN |
AF sweep done |
FOCUSED_LOCKED |
If AF successful Lens now locked |
|
ACTIVE_SCAN |
AF sweep done |
NOT_FOCUSED_LOCKED |
If AF successful Lens now locked |
|
ACTIVE_SCAN |
AF_CANCEL |
INACTIVE |
Cancel/reset AF Lens now locked |
|
FOCUSED_LOCKED |
AF_CANCEL |
INACTIVE |
Cancel/reset AF |
|
FOCUSED_LOCKED |
AF_TRIGGER |
ACTIVE_SCAN |
Start new sweep Lens now moving |
|
NOT_FOCUSED_LOCKED |
AF_CANCEL |
INACTIVE |
Cancel/reset AF |
|
NOT_FOCUSED_LOCKED |
AF_TRIGGER |
ACTIVE_SCAN |
Start new sweep Lens now moving |
|
All states |
mode change |
INACTIVE |
|
|
mode = AF_MODE_CONTINUOUS_VIDEO |
|||
|
State |
Transformation cause |
New state |
Notes |
|
INACTIVE |
HAL initiates new scan |
PASSIVE_SCAN |
Start AF sweep Lens now moving |
|
INACTIVE |
AF_TRIGGER |
NOT_FOCUSED_LOCKED |
AF state query Lens now locked |
|
PASSIVE_SCAN |
HAL completes current scan |
PASSIVE_FOCUSED |
End AF scan Lens now locked |
|
PASSIVE_SCAN |
AF_TRIGGER |
FOCUSED_LOCKED |
Immediate transformation if focus is good Lens now locked |
|
PASSIVE_SCAN |
AF_TRIGGER |
NOT_FOCUSED_LOCKED |
Immediate transformation if focus is bad Lens now locked |
|
PASSIVE_SCAN |
AF_CANCEL |
INACTIVE |
Reset lens position Lens now locked |
|
PASSIVE_FOCUSED |
HAL initiates new scan |
PASSIVE_SCAN |
Start AF scan Lens now moving |
|
PASSIVE_FOCUSED |
AF_TRIGGER |
FOCUSED_LOCKED |
Immediate transformation if focus is good Lens now locked |
|
PASSIVE_FOCUSED |
AF_TRIGGER |
NOT_FOCUSED_LOCKED |
Immediate transformation if focus is bad Lens now locked |
|
FOCUSED_LOCKED |
AF_TRIGGER |
FOCUSED_LOCKED |
No effect |
|
FOCUSED_LOCKED |
AF_CANCEL |
INACTIVE |
Restart AF scan |
|
NOT_FOCUSED_LOCKED |
AF_TRIGGER |
NOT_FOCUSED_LOCKED |
No effect |
|
NOT_FOCUSED_LOCKED |
AF_CANCEL |
INACTIVE |
Restart AF scan |
|
mode = AF_MODE_CONTINUOUS_PICTURE |
|||
|
State |
Transformation cause |
New state |
Notes |
|
INACTIVE |
HAL initiates new scan |
PASSIVE_SCAN |
Start AF scan Lens now moving |
|
INACTIVE |
AF_TRIGGER |
NOT_FOCUSED_LOCKED |
AF state query Lens now locked |
|
PASSIVE_SCAN |
HAL completes current scan |
PASSIVE_FOCUSED |
End AF scan Lens now locked |
|
PASSIVE_SCAN |
AF_TRIGGER |
FOCUSED_LOCKED |
Eventual transformation once focus good Lens now locked |
|
PASSIVE_SCAN |
AF_TRIGGER |
NOT_FOCUSED_LOCKED |
Eventual transformation if cannot focus Lens now locked |
|
PASSIVE_SCAN |
AF_CANCEL |
INACTIVE |
Reset lens position Lens now locked |
|
PASSIVE_FOCUSED |
HAL initiates new scan |
PASSIVE_SCAN |
Start AF scan Lens now moving |
|
PASSIVE_FOCUSED |
AF_TRIGGER |
FOCUSED_LOCKED |
Immediate transformation if focus is good Lens now locked |
|
PASSIVE_FOCUSED |
AF_TRIGGER |
NOT_FOCUSED_LOCKED |
Immediate transformation if focus is bad Lens now locked |
|
FOCUSED_LOCKED |
AF_TRIGGER |
FOCUSED_LOCKED |
No effect |
|
FOCUSED_LOCKED |
AF_CANCEL |
INACTIVE |
Restart AF scan |
|
NOT_FOCUSED_LOCKED |
AF_TRIGGER |
NOT_FOCUSED_LOCKED |
No effect |
|
NOT_FOCUSED_LOCKED |
AF_CANCEL |
INACTIVE |
Restart AF scan |
AE和AWB的状态机基本上是完全相同的。AE有额外的FLASH_REQUIRED和PRECAPTURE状态。所以下面行中涉及这两个状态时,AWB状态机忽略之。
|
mode = AE_MODE_OFF / AWB mode not AUTO |
|||
|
State |
Transformation cause |
New state |
Notes |
|
INACTIVE |
AE/AWB disabled |
||
|
mode = AE_MODE_ON_* / AWB_MODE_AUTO |
|||
|
State |
Transformation cause |
New state |
Notes |
|
INACTIVE |
HAL initiates AE/AWB scan |
SEARCHING |
|
|
INACTIVE |
AE/AWB_LOCK on |
LOCKED |
Values locked |
|
SEARCHING |
HAL finishes AE/AWB scan |
CONVERGED |
Good values, not changing |
|
SEARCHING |
HAL finishes AE scan |
FLASH_REQUIRED |
Converged but too dark without flash |
|
SEARCHING |
AE/AWB_LOCK on |
LOCKED |
Values locked |
|
CONVERGED |
HAL initiates AE/AWB scan |
SEARCHING |
Values locked |
|
CONVERGED |
AE/AWB_LOCK on |
LOCKED |
Values locked |
|
FLASH_REQUIRED |
HAL initiates AE/AWB scan |
SEARCHING |
Values locked |
|
FLASH_REQUIRED |
AE/AWB_LOCK on |
LOCKED |
Values locked |
|
LOCKED |
AE/AWB_LOCK off |
SEARCHING |
Values not good after unlock |
|
LOCKED |
AE/AWB_LOCK off |
CONVERGED |
Values good after unlock |
|
LOCKED |
AE_LOCK off |
FLASH_REQUIRED |
Exposure good, but too dark |
|
All AE states |
PRECAPTURE_START |
PRECAPTURE |
Start precapture sequence |
|
PRECAPTURE |
Sequence done, AE_LOCK off |
CONVERGED |
Ready for high-quality capture |
|
PRECAPTURE |
Sequence done, AE_LOCK on |
LOCKED |
Ready for high-quality capture |
在配置3A模块中所涉及的一些控制,允许application直接控制。
对于每个请求,HAL层负责3A控制的模块会检查3A控制字段的状态。如果有3A事例使能,这些事例可能会重置该事例相关的控制变量,重置的值会放置于此次捕获的结果元数据中。例如,如果在一个请求中自动曝光使能,HAL层会重置这个请求中的曝光值,增益和帧周期字段(和潜在的闪光灯字段,依赖于AE模式)。相关控制如下
|
Control name |
Unit |
Notes |
|
android.control.mode |
enum: OFF, AUTO, USE_SCENE_MODE |
High-level 3A control. When set to OFF, all 3A control by the HAL is disabled. The application must set the fields for capture parameters itself. When set to AUTO, the individual algorithm controls in android.control.* are in effect, such as android.control.afMode. When set to USE_SCENE_MODE, the individual controls in android.control.* are mostly disabled, and the HAL implements one of the scene mode settings (such as ACTION, SUNSET, or PARTY) as it wishes. |
|
android.control.afMode |
enum |
OFF means manual control of lens focusing through android.lens.focusDistance. |
|
android.control.aeMode |
enum |
OFF means manual control of exposure/gain/frame duration through android.sensor.exposureTime / .sensitivity / .frameDuration |
|
android.control.awbMode |
enum |
OFF means manual control of white balance. |
与老的Camera子系统不同,老系统从camera输出的数据有3~4种不同的类型(ANativeWindow-based preview operations, preview callbacks, video callbacks, and takePicture callbacks),而在新的camera子系统中,对于所有解决方案和输出数据格式,系统只输出ANativeWindow-based preview operations。可以一次配置多个这样的数据流,发送单帧给多个不同的目标,如GPU、视频编码器、渲染脚本(RenderScript)或应用程序的可见缓冲区(RAE Bayer、YUV buffer、或JPEG-encoded buffers)。
为了优化处理,所有输出流都必须提前配置,一次只能配置有限的数量。这样做的好处,就是允许提前分配内存缓冲区和配置camera硬件。于是,当一次提交多个请求或输出到多个不同pipeline时,就不会有请求延时。
为了实现新版Camera API的向后兼容,必须至少同时支持3路输出流,外加一路JPEG流。这是支持视频快拍的必须条件。
具体的需求仍然处于商定之中,还没有最终确定。
标签:configure 各类 ice Plan line color 实例 add nod
原文地址:https://www.cnblogs.com/tsts/p/9314924.html