标签:else scalar oat 最大 pen black lin img bsp
问题来源:
int main( int argc, char** argv )
{
//read the image
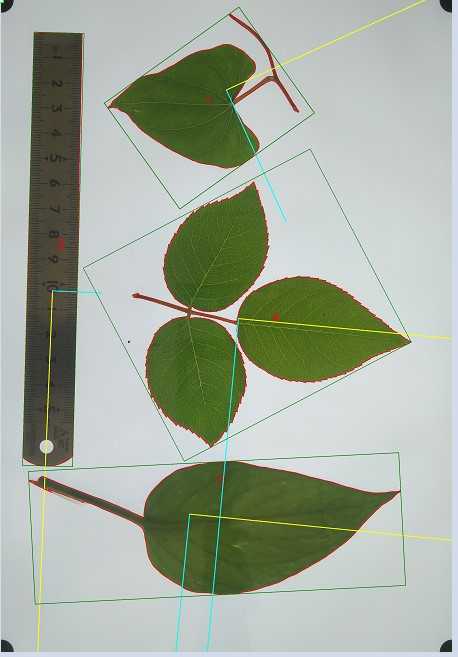
Mat img = imread("e:/sandbox/leaf.jpg");
Mat bw;
bool dRet;
//resize
pyrDown(img,img);
pyrDown(img,img);
cvtColor(img, bw, COLOR_BGR2GRAY);
//morphology operation
threshold(bw, bw, 150, 255, CV_THRESH_BINARY);
//bitwise_not(bw,bw);
//find and draw contours
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(bw, contours, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
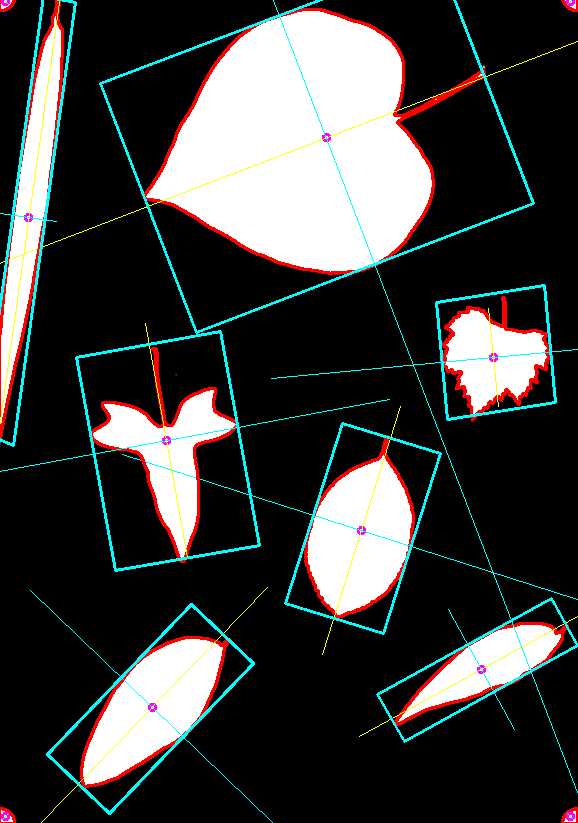
for (int i = 0;i<contours.size();i++)
{
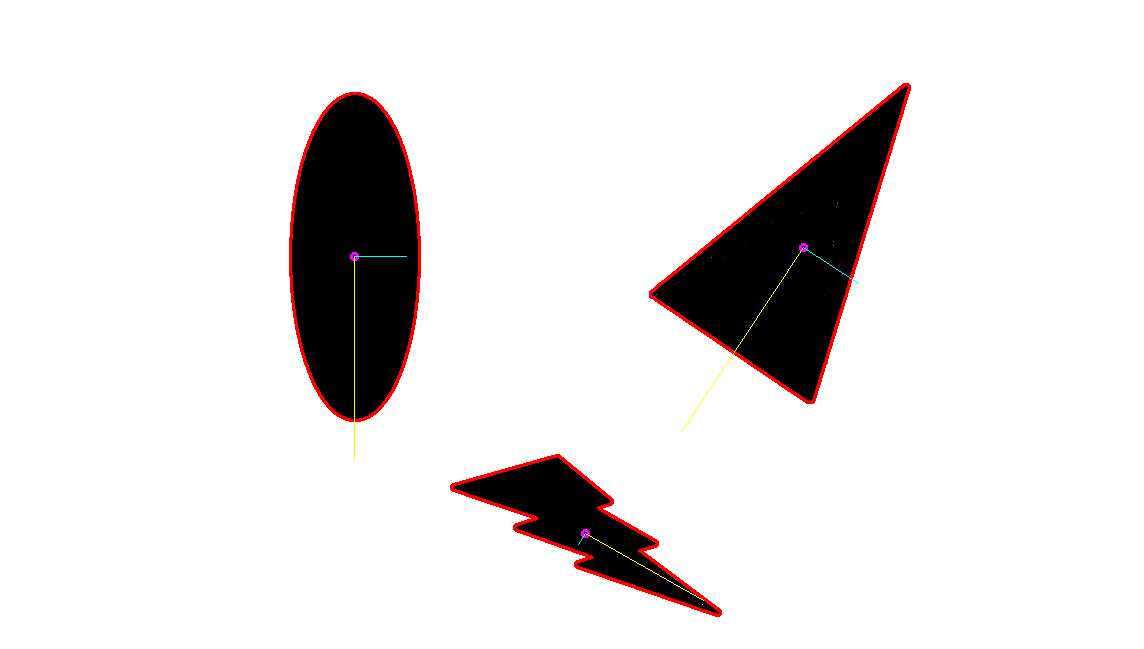
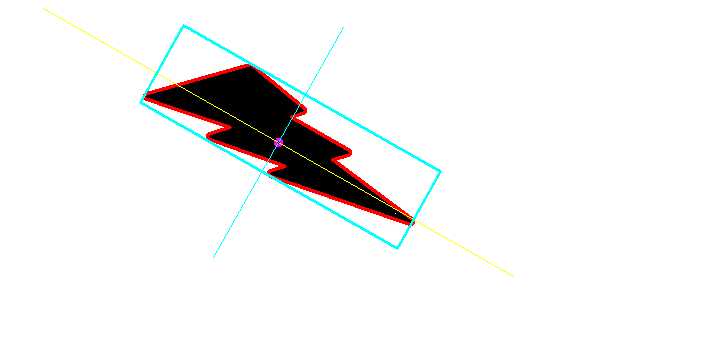
RotatedRect minRect = minAreaRect( Mat(contours[i]) );
Point2f rect_points[4];
minRect.points( rect_points );
for( int j = 0; j < 4; j++ )
line( img, rect_points[j], rect_points[(j+1)%4],Scalar(255,255,0),2);
}
imshow("img",img);
waitKey();
return 0;
}
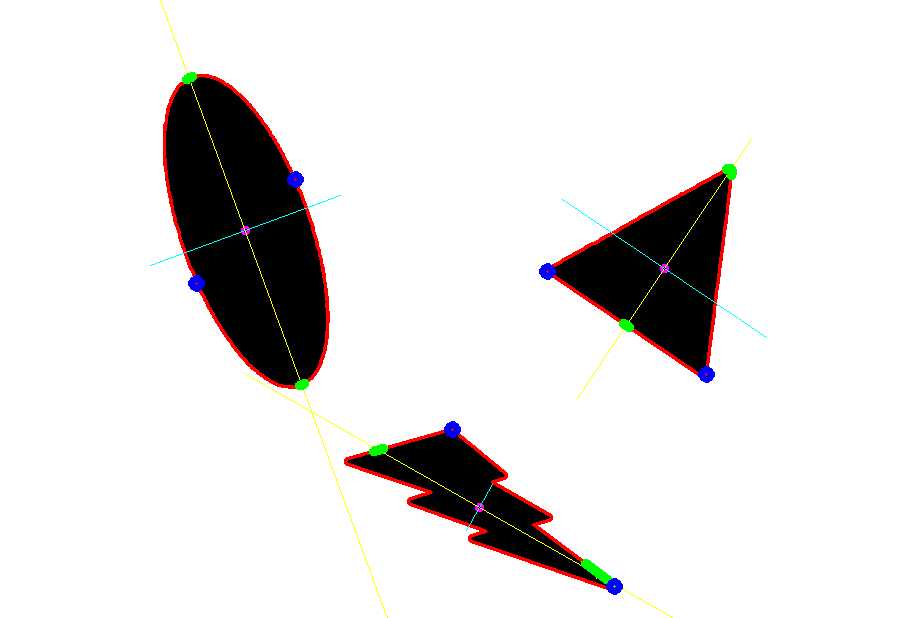
cv::RotatedRect cv::minAreaRect( InputArray _points )
{
CV_INSTRUMENT_REGION()
Mat hull;
Point2f out[3];
RotatedRect box;
convexHull(_points, hull, true, true);
if( hull.depth() != CV_32F )
{
Mat temp;
hull.convertTo(temp, CV_32F);
hull = temp;
}
int n = hull.checkVector(2);
const Point2f* hpoints = hull.ptr<Point2f>();
if( n > 2 )
{
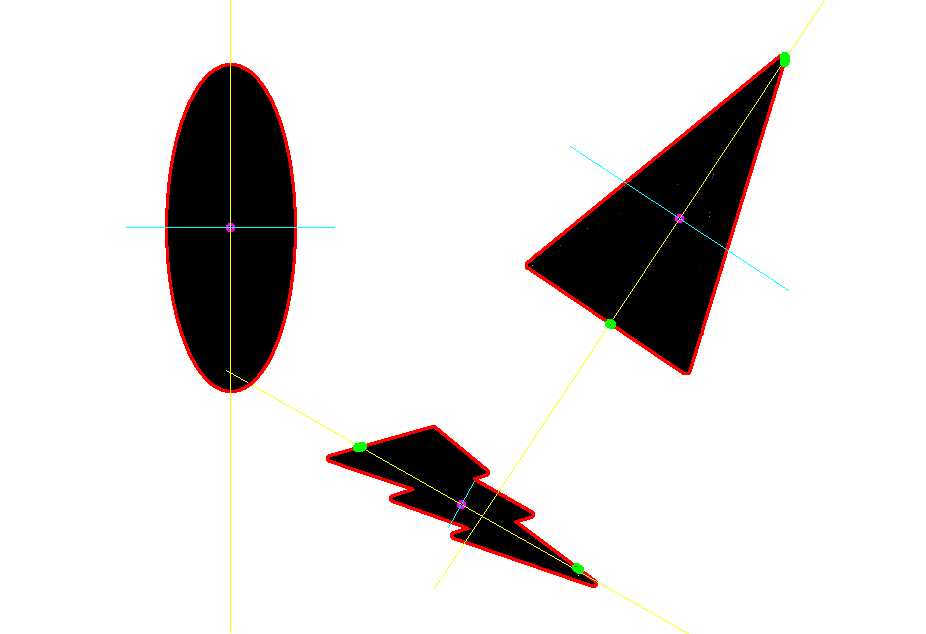
rotatingCalipers( hpoints, n, CALIPERS_MINAREARECT, (float*)out );
box.center.x = out[0].x + (out[1].x + out[2].x)*0.5f;
box.center.y = out[0].y + (out[1].y + out[2].y)*0.5f;
box.size.width = (float)std::sqrt((double)out[1].x*out[1].x + (double)out[1].y*out[1].y);
box.size.height = (float)std::sqrt((double)out[2].x*out[2].x + (double)out[2].y*out[2].y);
box.angle = (float)atan2( (double)out[1].y, (double)out[1].x );
}
else if( n == 2 )
{
box.center.x = (hpoints[0].x + hpoints[1].x)*0.5f;
box.center.y = (hpoints[0].y + hpoints[1].y)*0.5f;
double dx = hpoints[1].x - hpoints[0].x;
double dy = hpoints[1].y - hpoints[0].y;
box.size.width = (float)std::sqrt(dx*dx + dy*dy);
box.size.height = 0;
box.angle = (float)atan2( dy, dx );
}
else
{
if( n == 1 )
box.center = hpoints[0];
}
box.angle = (float)(box.angle*180/CV_PI);
return box;
}
标签:else scalar oat 最大 pen black lin img bsp
原文地址:https://www.cnblogs.com/jsxyhelu/p/9345590.html
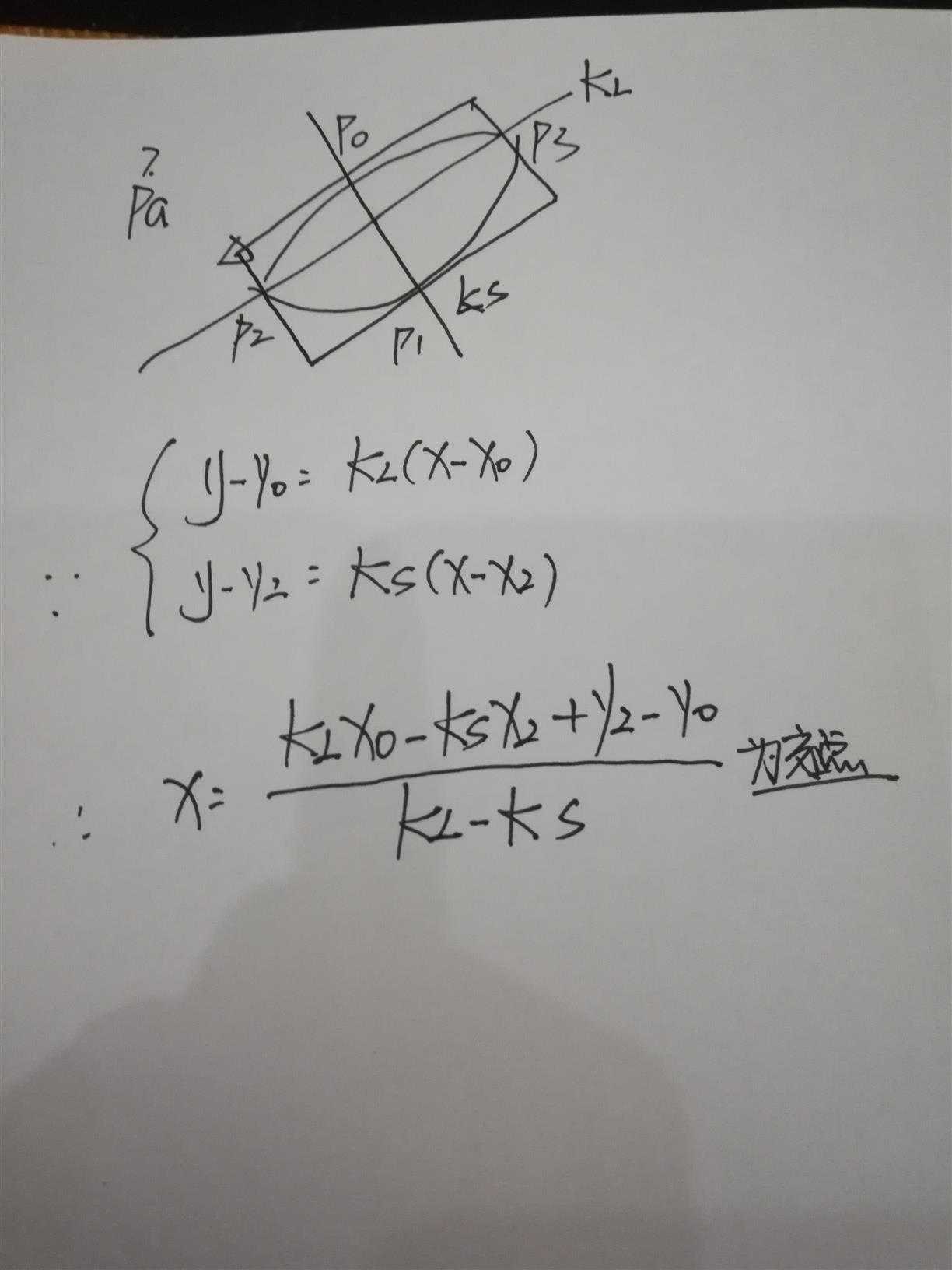
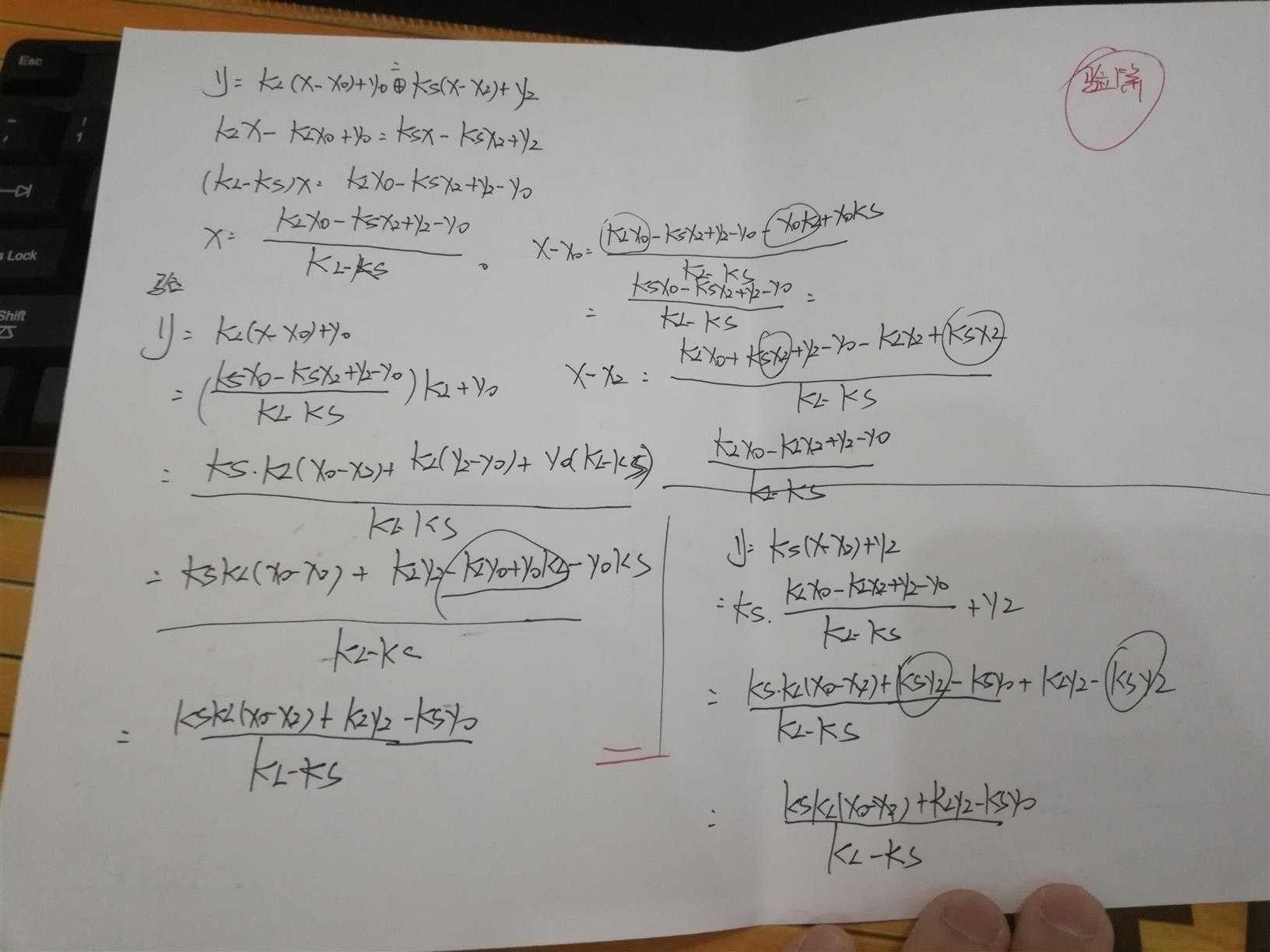
maybe: