标签:using upper length ons 分块 信息 计算 wim cat
// RotateZoom.cpp : Defines the entry point for the console application. // #include "stdafx.h" #include "RotateZoom.h" #ifdef _DEBUG #define new DEBUG_NEW #endif #include <atlimage.h> #include <locale.h> // The one and only application object CWinApp theApp; using namespace std; //双三次插值系数 double fs(double w) { double a=-0.5; double fs; if (abs(w)<=1) fs=(a+2)*pow(abs(w),3)-(a+3)*pow(abs(w),2)+1; else if (abs(w)>1&&abs(w)<=2) fs=a*pow(abs(w),3)-5*a*pow(abs(w),2)+8*a*abs(w)-4*a; else fs=0; return fs; } HRESULT RotateZoom(PBYTE pbSrc,int iWidth,int iHeight,double dbRotate,double dbZoom,PBYTE pbTag); int _tmain(int argc, TCHAR* argv[], TCHAR* envp[]) { int nRetCode = 0; setlocale(LC_ALL,"chs"); HMODULE hModule = ::GetModuleHandle(NULL); if (hModule != NULL) { // initialize MFC and print and error on failure CImage cImage; HRESULT hResult; int iWidth,iHeight,iBytePerPixel,iPitch; int i,j,x,y,w,h; PBYTE pbSrc=NULL,pbTag=NULL; PBYTE pbImage=NULL; PDWORD pdwImage=NULL; double dbRotate=0,dbZoom=0; double dbRotateStart=0,dbRotateEnd=0,dbRotateStep; double dbZoomStart=0,dbZoomEnd=0,dbZoomStep; BOOL bBenchWork=FALSE; CString csSrcName,csTagName,csNameRoot; TCHAR *ptChar; do{ if (!AfxWinInit(hModule, NULL, ::GetCommandLine(), 0)) { // TODO: change error code to suit your needs _tprintf(_T("Fatal Error: MFC initialization failed\n")); nRetCode = 1; break; } // TODO: code your application‘s behavior here. if(argc!=6 && argc!=10 ) { _tprintf(_T("使用方法:\n RotateZoom -S 源图像文件 旋转角度 缩放倍数 输出文件\n或:\n RotateZoom -B 源图像文件 旋转起始角度 步长 旋转终止角度 缩放起始倍数 步长 缩放终止倍数 输出文件\n")); nRetCode= -1; break; } if(_tcsnicmp(argv[1],_T("-B"),2)==0) { bBenchWork=TRUE; } else if(_tcsnicmp(argv[1],_T("-S"),2)==0) { bBenchWork=FALSE; } else { _tprintf(_T("使用方法:\n RotateZoom -S 源图像文件 旋转角度 缩放倍数 输出文件\n或:\nRotateZoom -B 源图像文件 旋转起始角度 步长 旋转终止角度 缩放起始倍数 步长 缩放终止倍数 输出文件\n")); nRetCode= -1; break; } if(bBenchWork) { csSrcName=argv[2]; _stscanf(argv[3],_T("%lf"),&dbRotateStart); _stscanf(argv[4],_T("%lf"),&dbRotateStep); _stscanf(argv[5],_T("%lf"),&dbRotateEnd); _stscanf(argv[6],_T("%lf"),&dbZoomStart); _stscanf(argv[7],_T("%lf"),&dbZoomStep); _stscanf(argv[8],_T("%lf"),&dbZoomEnd); dbZoom=dbZoomStart>dbZoomEnd?dbZoomStart:dbZoomEnd; csTagName=argv[9]; if(!((dbRotateStart>=0 && dbRotateStart<360) && (dbRotateEnd>=0 && dbRotateEnd<360) && (dbZoomStart>=0.26 && dbZoomStart<=16) && (dbZoomStart>=0.25 && dbZoomStart<=16) && (dbRotateStep>=0.01) && (dbZoomEnd>=0.01))) { _tprintf(_T("旋转角度范围(0~360),缩放倍数范围(0.25~16),步长范围(>=0.01)。输入参数超出范围!\n")); nRetCode= -2; break; } } else { csSrcName=argv[2]; _stscanf(argv[3],_T("%lf"),&dbRotate); _stscanf(argv[4],_T("%lf"),&dbZoom); csTagName=argv[5]; if(!((dbRotate>=0 && dbRotate<360) && (dbZoom>=0.25 && dbZoom<=16))) { _tprintf(_T("旋转角度范围(0~360),缩放倍数范围(0.25~16)。输入参数超出范围!\n")); nRetCode= -2; break; } } hResult=cImage.Load(csSrcName); if(hResult!=ERROR_SUCCESS) { _tprintf(_T("源图像文件名错误!\n")); nRetCode= -3; break; } iWidth=cImage.GetWidth(); iHeight=cImage.GetHeight(); pbSrc = (PBYTE)malloc(iWidth*iHeight);//存原图数据大小没问题 if(dbZoom>1) pbTag = (PBYTE)malloc(ceil(iWidth*dbZoom)*ceil(iHeight*dbZoom)); else pbTag = (PBYTE)malloc(iWidth*iHeight); if(pbSrc==NULL || pbTag==NULL ) { _tprintf(_T("内存申请错误!\n")); nRetCode= -4; break; } iPitch=cImage.GetPitch(); iBytePerPixel=(cImage.GetBPP()+7)/8; if(iBytePerPixel==3) { for(y=0;y<iHeight;y++) { pbImage=(PBYTE)(PBYTE(cImage.GetBits())+iPitch*y);//得到的是图像初始像素地址 for(x=0;x<iWidth;x++) { pbSrc[y*iWidth+x]=(pbImage[3*x]*0.15+pbImage[3*x+1]*0.55+pbImage[3*x+2]*0.3);//转换成灰度就是单个像素了,分配大小还是原来的?。 } } } cImage.Destroy(); csTagName.Trim(); csTagName.MakeUpper(); if(bBenchWork) { if(csTagName.Right(4)!=_T(".BMP") ) csNameRoot=csTagName; else csNameRoot=csTagName.Left (csTagName.GetLength()-4); j=0; for(dbZoom=dbZoomStart;dbZoom<=dbZoomEnd;dbZoom+=dbZoomStep) { w=ceil(iWidth*dbZoom); h=ceil(iHeight*dbZoom); cImage.Create(w,-h,32); iPitch=cImage.GetPitch(); for(dbRotate=dbRotateStart;dbRotate<=dbRotateEnd;dbRotate+=dbRotateStep) { hResult=RotateZoom(pbSrc,iWidth,iHeight,dbRotate,dbZoom,pbTag); if(hResult!=ERROR_SUCCESS) { _tprintf(_T("图像处理错误!\n")); nRetCode= -5; break; } for(y=0;y<h;y++) { pdwImage=(PDWORD)(PBYTE(cImage.GetBits())+iPitch*y); for(x=0;x<w;x++) { pdwImage[x]=pbTag[y*w+x]*0x10101; } } csTagName=csNameRoot; csTagName.AppendFormat(_T("_Z%05.2f_R%06.2f.BMP"),dbZoom,dbRotate); hResult=cImage.Save(csTagName,Gdiplus::ImageFormatBMP); if(hResult!=ERROR_SUCCESS) { _tprintf(_T("图像结果保存错误!\n")); nRetCode= -5; break; } i=csTagName.GetLength(); ptChar=csTagName.GetBuffer(i+1); ptChar[i]=_T(‘\0‘); _tprintf(_T("图像处理成功!%s\n"),ptChar); csTagName.ReleaseBuffer(); nRetCode= ERROR_SUCCESS; j++; } cImage.Destroy(); if(nRetCode!=ERROR_SUCCESS) break; } if(nRetCode==ERROR_SUCCESS) _tprintf(_T("批处理完成!共处理%d\n"),j); else _tprintf(_T("批处理出错!已处理%d\n"),j); } else { hResult=RotateZoom(pbSrc,iWidth,iHeight,dbRotate,dbZoom,pbTag); if(hResult!=ERROR_SUCCESS) { _tprintf(_T("图像处理错误!\n")); nRetCode= -5; break; } iWidth=ceil(iWidth*dbZoom); iHeight=ceil(iHeight*dbZoom); cImage.Create(iWidth,-iHeight,32); iPitch=cImage.GetPitch(); for(y=0;y<iHeight;y++) { pdwImage=(PDWORD)(PBYTE(cImage.GetBits())+iPitch*y); for(x=0;x<iWidth;x++) { pdwImage[x]=pbTag[y*iWidth+x]*0x10101; } } if(csTagName.Right(4)!=_T(".BMP") ) csTagName.Append(_T(".BMP")); hResult=cImage.Save(csTagName,Gdiplus::ImageFormatBMP); if(hResult!=ERROR_SUCCESS) { _tprintf(_T("图像结果保存错误!\n")); nRetCode= -5; break; } i=csTagName.GetLength(); ptChar=csTagName.GetBuffer(i+1); ptChar[i]=_T(‘\0‘); _tprintf(_T("图像处理成功!%s\n"),ptChar); csTagName.ReleaseBuffer(); nRetCode= ERROR_SUCCESS; } break; }while(0); if(pbSrc) free(pbSrc); if(pbTag) free(pbTag); } else { // TODO: change error code to suit your needs _tprintf(_T("Fatal Error: GetModuleHandle failed\n")); nRetCode = 1; } _tprintf(_T("按任意键退出!")); getchar(); return nRetCode; } HRESULT RotateZoom(PBYTE pbSrc,int iWidth,int iHeight,double dbRotate,double dbZoom,PBYTE pbTag) { double phase[33]={0};//16相位,包含端点存在33个距离 for (int i=0;i<33;i++) { double i2=1.0*i; phase[i]=fs(i2/16); } int size; if(dbZoom>1) { size=iWidth*iHeight; } else { size=ceil(iWidth*dbZoom)*ceil(iHeight*dbZoom); } int newWidth=ceil(dbZoom*iWidth); //旋转中心为图像中心 double rx0=ceil(dbZoom*iWidth)*0.5; double ry0=ceil(dbZoom*iHeight)*0.5; double srcx,srcy,u,v; int xOr,yOr; dbRotate=dbRotate*3.1415926/180.0; int xo=250,yo=250; for(int y=yo;y<yo+250;y++) { for(int x=xo;x<xo+250;x++) { srcx=(double)((x-rx0)*cos(dbRotate) - (y-ry0)*sin(dbRotate) + rx0) ; srcy=(double)((x-rx0)*sin(dbRotate) + (y-ry0)*cos(dbRotate) + ry0) ; srcx=srcx*1/dbZoom; srcy=srcy*1/dbZoom; xOr = floor(srcx); yOr = floor(srcy); u=srcx-xOr; v=srcy-yOr; int phasex=floor(16*u+0.5);//16相位 int phasey=floor(16*v+0.5); double A1,B1,C1,D1,A2,B2,C2,D2; A1=phase[16+phasex]; B1=phase[phasex]; C1=phase[16-phasex]; D1=phase[32-phasex]; A2=phase[16+phasey]; B2=phase[phasey]; C2=phase[16-phasey]; D2=phase[32-phasey]; int newWidth=ceil(dbZoom*iWidth); int block_numx=ceil((xOr+1.0)/16); int block_numy=ceil((yOr+1.0)/16); double blockSrc[256]={0}; int newcount=0; //int k=0,l=0; //分块存储进数组blockSrc[]中 for(int k=0;k<16;k++) { for(int l=0;l<16;l++) { int oldcount=(16*block_numy-16+k)*iWidth+16*block_numx-16+l; blockSrc[newcount]=pbSrc[oldcount]; //pbTag[newcount]=pbSrc[oldcount]; newcount++; //cout<<oldcount<<endl; } }//分块存入完毕 if( !(xOr-1>=0 && xOr+2<=iWidth && yOr-1>=0 && yOr+2<=iHeight)) { pbTag[y*newWidth+x]=0;//255 } else { //映射到16×16块内的初始点位置 xOr=xOr-(16*block_numx-16); yOr=yOr-(16*block_numy-16); //if(xOr>=1 && xOr<=14 && yOr>=1 && yOr<=14) pbTag[y*newWidth+x]=blockSrc[yOr*16+xOr]; //else // pbTag[y*newWidth+x]=255; } } } return ERROR_SUCCESS; }
pbTag[y*newWidth+x]=blockSrc[yOr*16+xOr];
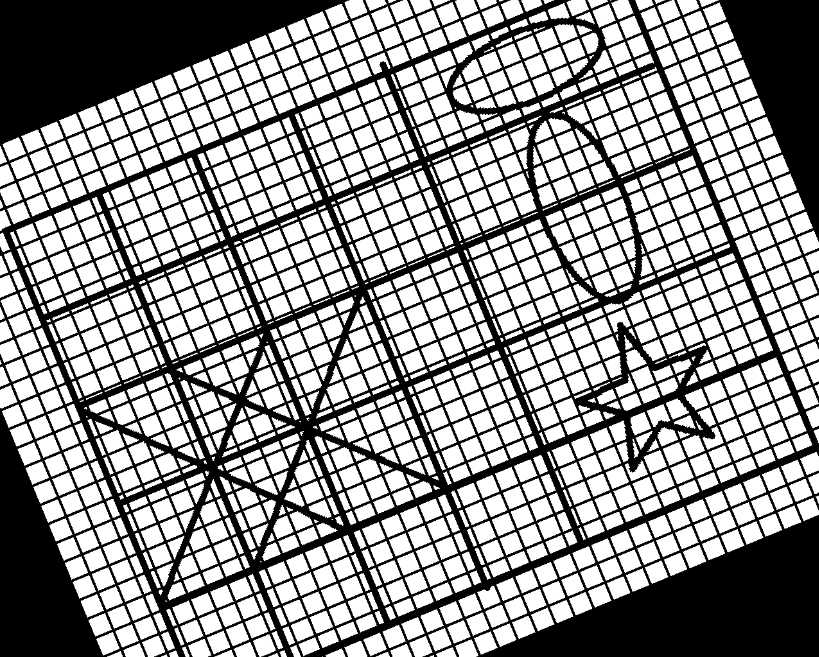
处理后图起始点(250,250),区域250×250区域;
直接赋值过去,由于图像是放大二倍,效果近似最近邻插值。
边界待定值赋白色
if(xOr>=1 && xOr<=14 && yOr>=1 && yOr<=14)
pbTag[y*newWidth+x]=blockSrc[yOr*16+xOr];
else
pbTag[y*newWidth+x]=255;
if(xOr>=1 && xOr<=14 && yOr>=1 && yOr<=14)
pbTag[y*newWidth+x]=blockSrc[yOr*16+xOr];
else
pbTag[y*newWidth+x]=0;
int xo=0,yo=0;
for(int y=yo;y<ceil(dbZoom*iHeight);y++)
{
for(int x=xo;x<ceil(dbZoom*iWidth);x++)
{
原因在于映射回的初始点(xOr、yOr)没有事先判断,
要先判断是否映射落回原图点上再进行后续计算,因为后续用到了xOr、yOr的值。
代码如下:(还需要再处理下边界处、引入双三次插值 就OK了)
// RotateZoom.cpp : Defines the entry point for the console application. // #include "stdafx.h" #include "RotateZoom.h" #ifdef _DEBUG #define new DEBUG_NEW #endif #include <atlimage.h> #include <locale.h> // The one and only application object CWinApp theApp; using namespace std; //双三次插值系数 double fs(double w) { double a=-0.5; double fs; if (abs(w)<=1) fs=(a+2)*pow(abs(w),3)-(a+3)*pow(abs(w),2)+1; else if (abs(w)>1&&abs(w)<=2) fs=a*pow(abs(w),3)-5*a*pow(abs(w),2)+8*a*abs(w)-4*a; else fs=0; return fs; } HRESULT RotateZoom(PBYTE pbSrc,int iWidth,int iHeight,double dbRotate,double dbZoom,PBYTE pbTag); int _tmain(int argc, TCHAR* argv[], TCHAR* envp[]) { int nRetCode = 0; setlocale(LC_ALL,"chs"); HMODULE hModule = ::GetModuleHandle(NULL); if (hModule != NULL) { // initialize MFC and print and error on failure CImage cImage; HRESULT hResult; int iWidth,iHeight,iBytePerPixel,iPitch; int i,j,x,y,w,h; PBYTE pbSrc=NULL,pbTag=NULL; PBYTE pbImage=NULL; PDWORD pdwImage=NULL; double dbRotate=0,dbZoom=0; double dbRotateStart=0,dbRotateEnd=0,dbRotateStep; double dbZoomStart=0,dbZoomEnd=0,dbZoomStep; BOOL bBenchWork=FALSE; CString csSrcName,csTagName,csNameRoot; TCHAR *ptChar; do{ if (!AfxWinInit(hModule, NULL, ::GetCommandLine(), 0)) { // TODO: change error code to suit your needs _tprintf(_T("Fatal Error: MFC initialization failed\n")); nRetCode = 1; break; } // TODO: code your application‘s behavior here. if(argc!=6 && argc!=10 ) { _tprintf(_T("使用方法:\n RotateZoom -S 源图像文件 旋转角度 缩放倍数 输出文件\n或:\n RotateZoom -B 源图像文件 旋转起始角度 步长 旋转终止角度 缩放起始倍数 步长 缩放终止倍数 输出文件\n")); nRetCode= -1; break; } if(_tcsnicmp(argv[1],_T("-B"),2)==0) { bBenchWork=TRUE; } else if(_tcsnicmp(argv[1],_T("-S"),2)==0) { bBenchWork=FALSE; } else { _tprintf(_T("使用方法:\n RotateZoom -S 源图像文件 旋转角度 缩放倍数 输出文件\n或:\nRotateZoom -B 源图像文件 旋转起始角度 步长 旋转终止角度 缩放起始倍数 步长 缩放终止倍数 输出文件\n")); nRetCode= -1; break; } if(bBenchWork) { csSrcName=argv[2]; _stscanf(argv[3],_T("%lf"),&dbRotateStart); _stscanf(argv[4],_T("%lf"),&dbRotateStep); _stscanf(argv[5],_T("%lf"),&dbRotateEnd); _stscanf(argv[6],_T("%lf"),&dbZoomStart); _stscanf(argv[7],_T("%lf"),&dbZoomStep); _stscanf(argv[8],_T("%lf"),&dbZoomEnd); dbZoom=dbZoomStart>dbZoomEnd?dbZoomStart:dbZoomEnd; csTagName=argv[9]; if(!((dbRotateStart>=0 && dbRotateStart<360) && (dbRotateEnd>=0 && dbRotateEnd<360) && (dbZoomStart>=0.26 && dbZoomStart<=16) && (dbZoomStart>=0.25 && dbZoomStart<=16) && (dbRotateStep>=0.01) && (dbZoomEnd>=0.01))) { _tprintf(_T("旋转角度范围(0~360),缩放倍数范围(0.25~16),步长范围(>=0.01)。输入参数超出范围!\n")); nRetCode= -2; break; } } else { csSrcName=argv[2]; _stscanf(argv[3],_T("%lf"),&dbRotate); _stscanf(argv[4],_T("%lf"),&dbZoom); csTagName=argv[5]; if(!((dbRotate>=0 && dbRotate<360) && (dbZoom>=0.25 && dbZoom<=16))) { _tprintf(_T("旋转角度范围(0~360),缩放倍数范围(0.25~16)。输入参数超出范围!\n")); nRetCode= -2; break; } } hResult=cImage.Load(csSrcName); if(hResult!=ERROR_SUCCESS) { _tprintf(_T("源图像文件名错误!\n")); nRetCode= -3; break; } iWidth=cImage.GetWidth(); iHeight=cImage.GetHeight(); pbSrc = (PBYTE)malloc(iWidth*iHeight);//存原图数据大小没问题 if(dbZoom>1) pbTag = (PBYTE)malloc(ceil(iWidth*dbZoom)*ceil(iHeight*dbZoom)); else pbTag = (PBYTE)malloc(iWidth*iHeight); if(pbSrc==NULL || pbTag==NULL ) { _tprintf(_T("内存申请错误!\n")); nRetCode= -4; break; } iPitch=cImage.GetPitch(); iBytePerPixel=(cImage.GetBPP()+7)/8; if(iBytePerPixel==3) { for(y=0;y<iHeight;y++) { pbImage=(PBYTE)(PBYTE(cImage.GetBits())+iPitch*y);//得到的是图像初始像素地址 for(x=0;x<iWidth;x++) { pbSrc[y*iWidth+x]=(pbImage[3*x]*0.15+pbImage[3*x+1]*0.55+pbImage[3*x+2]*0.3);//转换成灰度就是单个像素了,分配大小还是原来的?。 } } } cImage.Destroy(); csTagName.Trim(); csTagName.MakeUpper(); if(bBenchWork) { if(csTagName.Right(4)!=_T(".BMP") ) csNameRoot=csTagName; else csNameRoot=csTagName.Left (csTagName.GetLength()-4); j=0; for(dbZoom=dbZoomStart;dbZoom<=dbZoomEnd;dbZoom+=dbZoomStep) { w=ceil(iWidth*dbZoom); h=ceil(iHeight*dbZoom); cImage.Create(w,-h,32); iPitch=cImage.GetPitch(); for(dbRotate=dbRotateStart;dbRotate<=dbRotateEnd;dbRotate+=dbRotateStep) { hResult=RotateZoom(pbSrc,iWidth,iHeight,dbRotate,dbZoom,pbTag); if(hResult!=ERROR_SUCCESS) { _tprintf(_T("图像处理错误!\n")); nRetCode= -5; break; } for(y=0;y<h;y++) { pdwImage=(PDWORD)(PBYTE(cImage.GetBits())+iPitch*y); for(x=0;x<w;x++) { pdwImage[x]=pbTag[y*w+x]*0x10101; } } csTagName=csNameRoot; csTagName.AppendFormat(_T("_Z%05.2f_R%06.2f.BMP"),dbZoom,dbRotate); hResult=cImage.Save(csTagName,Gdiplus::ImageFormatBMP); if(hResult!=ERROR_SUCCESS) { _tprintf(_T("图像结果保存错误!\n")); nRetCode= -5; break; } i=csTagName.GetLength(); ptChar=csTagName.GetBuffer(i+1); ptChar[i]=_T(‘\0‘); _tprintf(_T("图像处理成功!%s\n"),ptChar); csTagName.ReleaseBuffer(); nRetCode= ERROR_SUCCESS; j++; } cImage.Destroy(); if(nRetCode!=ERROR_SUCCESS) break; } if(nRetCode==ERROR_SUCCESS) _tprintf(_T("批处理完成!共处理%d\n"),j); else _tprintf(_T("批处理出错!已处理%d\n"),j); } else { hResult=RotateZoom(pbSrc,iWidth,iHeight,dbRotate,dbZoom,pbTag); if(hResult!=ERROR_SUCCESS) { _tprintf(_T("图像处理错误!\n")); nRetCode= -5; break; } iWidth=ceil(iWidth*dbZoom); iHeight=ceil(iHeight*dbZoom); cImage.Create(iWidth,-iHeight,32); iPitch=cImage.GetPitch(); for(y=0;y<iHeight;y++) { pdwImage=(PDWORD)(PBYTE(cImage.GetBits())+iPitch*y); for(x=0;x<iWidth;x++) { pdwImage[x]=pbTag[y*iWidth+x]*0x10101; } } if(csTagName.Right(4)!=_T(".BMP") ) csTagName.Append(_T(".BMP")); hResult=cImage.Save(csTagName,Gdiplus::ImageFormatBMP); if(hResult!=ERROR_SUCCESS) { _tprintf(_T("图像结果保存错误!\n")); nRetCode= -5; break; } i=csTagName.GetLength(); ptChar=csTagName.GetBuffer(i+1); ptChar[i]=_T(‘\0‘); _tprintf(_T("图像处理成功!%s\n"),ptChar); csTagName.ReleaseBuffer(); nRetCode= ERROR_SUCCESS; } break; }while(0); if(pbSrc) free(pbSrc); if(pbTag) free(pbTag); } else { // TODO: change error code to suit your needs _tprintf(_T("Fatal Error: GetModuleHandle failed\n")); nRetCode = 1; } _tprintf(_T("按任意键退出!")); getchar(); return nRetCode; } HRESULT RotateZoom(PBYTE pbSrc,int iWidth,int iHeight,double dbRotate,double dbZoom,PBYTE pbTag) { double phase[33]={0};//16相位,包含端点存在33个距离 for (int i=0;i<33;i++) { double i2=1.0*i; phase[i]=fs(i2/16); } int size; if(dbZoom>1) { size=iWidth*iHeight; } else { size=ceil(iWidth*dbZoom)*ceil(iHeight*dbZoom); } int newWidth=ceil(dbZoom*iWidth); //旋转中心为图像中心 double rx0=ceil(dbZoom*iWidth)*0.5; double ry0=ceil(dbZoom*iHeight)*0.5; double srcx,srcy,u,v; int xOr,yOr; dbRotate=dbRotate*3.1415926/180.0; int xo=0,yo=0; for(int y=yo;y<ceil(dbZoom*iHeight);y++) { for(int x=xo;x<ceil(dbZoom*iWidth);x++) { srcx=(double)((x-rx0)*cos(dbRotate) - (y-ry0)*sin(dbRotate) + rx0) ; srcy=(double)((x-rx0)*sin(dbRotate) + (y-ry0)*cos(dbRotate) + ry0) ; srcx=srcx*1/dbZoom; srcy=srcy*1/dbZoom; xOr = floor(srcx); yOr = floor(srcy); if( !(xOr-1>=0 && xOr+2<=iWidth && yOr-1>=0 && yOr+2<=iHeight)) { pbTag[y*newWidth+x]=0;//255 } else { u=srcx-xOr; v=srcy-yOr; int phasex=floor(16*u+0.5);//16相位 int phasey=floor(16*v+0.5); double A1,B1,C1,D1,A2,B2,C2,D2; A1=phase[16+phasex]; B1=phase[phasex]; C1=phase[16-phasex]; D1=phase[32-phasex]; A2=phase[16+phasey]; B2=phase[phasey]; C2=phase[16-phasey]; D2=phase[32-phasey]; int newWidth=ceil(dbZoom*iWidth); int block_numx=ceil((xOr+1.0)/16); int block_numy=ceil((yOr+1.0)/16); double blockSrc[256]={0}; int newcount=0; //int k=0,l=0; //分块存储进数组blockSrc[]中 for(int k=0;k<16;k++) { for(int l=0;l<16;l++) { int oldcount=(16*block_numy-16+k)*iWidth+16*block_numx-16+l; blockSrc[newcount]=pbSrc[oldcount]; //pbTag[newcount]=pbSrc[oldcount]; newcount++; //cout<<oldcount<<endl; } }//分块存入完毕 //映射到16×16块内的初始点位置 xOr=xOr-(16*block_numx-16); yOr=yOr-(16*block_numy-16); if(xOr>=1 && xOr<=14 && yOr>=1 && yOr<=14) pbTag[y*newWidth+x]=blockSrc[yOr*16+xOr]; else pbTag[y*newWidth+x]=255; } } } return ERROR_SUCCESS; }
图像旋转中原图16×16分块测试2,映射后插入图中,测试边界信息
标签:using upper length ons 分块 信息 计算 wim cat
原文地址:https://www.cnblogs.com/wxl845235800/p/9367785.html