标签:带来 机制 inf 精度 eal type dep time 特征
2个挑战:
1)在杂乱背景下人脸视角大的变化需要人脸检测器精准的解决复杂人脸和非人脸的分类问题。
2)较大的搜索空间和人脸尺寸进一步增加了时间效率的需要。
传统方法效率高但在人脸大的视角变化下精度不够,基于CNN的方法精度高但速度很慢。
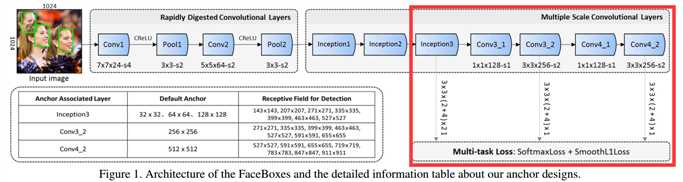
受到Faster R-CNN的RPN以及SSD中多尺度机制的启发,便有了这篇可以在CPU上实时跑的FaceBoxes。
将RPN作为一个人脸检测器,不能获取很好的性能有以下两个原因:
为解决这个问题,对MSCL从以下两个角度去设计:
论文阅读:FaceBoxes: A CPU Real-time Face Detector with High Accuracy
标签:带来 机制 inf 精度 eal type dep time 特征
原文地址:https://www.cnblogs.com/ocean1100/p/9381429.html