标签:创客 驱动 style 理解 产生 gray 接地线 5.5 bsp

我造轮子,你造车,创客一起造起来!塔克创新资讯【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】

本文介绍X-CTR100控制器的舵机控制,X-CTR100具有16路舵机控制接口,通过定时器产生PWM控制信号,可用于航模、机械臂、机器人等制作。

舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前,在高档遥控玩具,如飞机、潜艇模型,遥控机器人中已经得到了普遍应用。
舵机的形状和大小多到让人眼花缭乱,但大致可以如图C所示分类。最右边身材不错的是常见的标准舵机,中间两个小不点是体积最小的微型舵机,左边的魁梧的那个是体积最大的大扭力舵机。它们都是同样的三线控制,因此你可以根据需求换个大个的或小个的。
除了大小和重量,舵机还有两个主要的性能指标:扭力和转速,这两个指标由齿轮组和电机所决定。扭力,通俗讲就是舵机有多大的劲儿。在5V的电压下,标准舵机的扭力是5.5千克/厘米(75盎司/英寸),转速很容易理解,就是指从一个位置转到另一个位置要多长时间。在5V电压下,舵机标准转度是0.2秒移动60度。总之,和我们人一样,舵机的个子越大,转的就越慢但也越有劲儿。
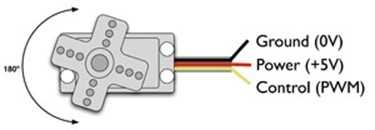
舵机有一个三线的接口。黑色(或棕色)的线是接地线,红线接+5V电压,黄线(或是白色或橙色)接控制信号端。
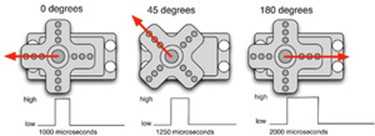
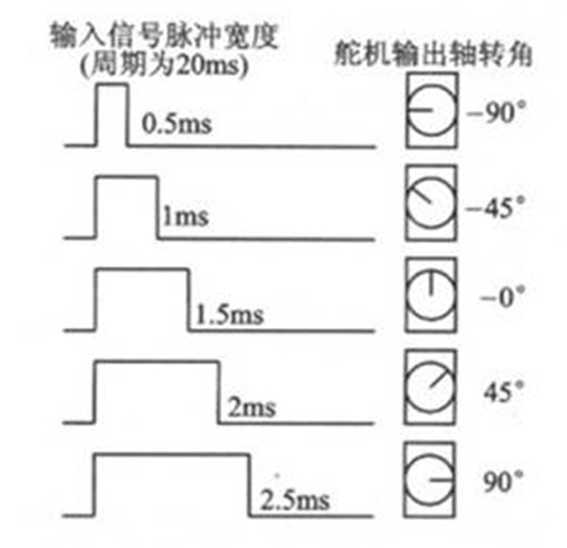
舵机的控制信号周期为20ms的脉宽调制(PWM)信号,其中脉冲宽度从0.5-2.5ms,相对应的舵盘位置为0-180度,呈线性变化。即提供一定的脉宽,它的输出轴就会保持一定对应角度上,无论外界转矩怎么改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应位置。舵机控制脉冲宽度与转角关系如下图。
控制16路舵机30度、90度、150度间隔运动。。
硬件资源:
硬件连接:

X-SOFT软件生态,X-API扩展文件如下。
ax_servo.c——X-CTR100 舵机控制源文件
ax_servo.h——X-CTR100 舵机控制头文件
接口函数
void AX_SERVO_TIM2_AB_Init(void); //舵机AB接口初始化 void AX_SERVO_TIM2_A_SetAngle(uint16_t angle); //舵机A控制 void AX_SERVO_TIM2_B_SetAngle(uint16_t angle); //舵机B控制
void AX_SERVO_TIM5_CD_Init(void); //舵机CD接口初始化 void AX_SERVO_TIM5_C_SetAngle(uint16_t angle); //舵机C控制 void AX_SERVO_TIM5_D_SetAngle(uint16_t angle); //舵机D控制
void AX_SERVO_TIM3_EFGH_Init(void); //舵机EFGH接口初始化 void AX_SERVO_TIM3_E_SetAngle(uint16_t angle); //舵机E控制 void AX_SERVO_TIM3_F_SetAngle(uint16_t angle); //舵机F控制 void AX_SERVO_TIM3_G_SetAngle(uint16_t angle); //舵机G控制 void AX_SERVO_TIM3_H_SetAngle(uint16_t angle); //舵机H控制
void AX_SERVO_TIM4_IJKL_Init(void); //舵机IJKL接口初始化 void AX_SERVO_TIM4_I_SetAngle(uint16_t angle); //舵机I控制 void AX_SERVO_TIM4_J_SetAngle(uint16_t angle); //舵机J控制 void AX_SERVO_TIM4_K_SetAngle(uint16_t angle); //舵机K控制 void AX_SERVO_TIM4_L_SetAngle(uint16_t angle); //舵机L控制
void AX_SERVO_TIM1_MNOP_Init(void); //舵机MNOP接口初始化 void AX_SERVO_TIM1_M_SetAngle(uint16_t angle); //舵机M控制 void AX_SERVO_TIM1_N_SetAngle(uint16_t angle); //舵机N控制 void AX_SERVO_TIM1_O_SetAngle(uint16_t angle); //舵机O控制 void AX_SERVO_TIM1_P_SetAngle(uint16_t angle); //舵机P控制 |
函数AX_SERVO_TIMX_XX_Init()完成舵机控制定时器和IO的初始化,TIMX为对应的定时器,XX为初始化所包含的舵机接口,例如AX_SERVO_TIM3_EFGH_Init()初始化定时器TIM3,包含的接口为EFGH。while循环中通过AX_SERVO_TIMX_X_SetAngle()设置舵机的旋转角度,实现16路舵机30°、90°、150°间隔运动。主程序代码如下。
int main(void) { //X-CTR100初始化 AX_Init(115200); printf("***X-CTR100 舵机控制例程***\r\n\r\n");
//模块初始化及配置 AX_SERVO_TIM2_AB_Init(); AX_SERVO_TIM5_CD_Init(); AX_SERVO_TIM3_EFGH_Init(); AX_SERVO_TIM4_IJKL_Init(); AX_SERVO_TIM1_MNOP_Init();
//X-API测试:16路舵机控制测试 printf("*16路舵机控制测试\r\n");
while (1) { printf("*30度...... \r\n"); AX_SERVO_TIM2_A_SetAngle(300); AX_SERVO_TIM2_B_SetAngle(300); AX_SERVO_TIM5_C_SetAngle(300); AX_SERVO_TIM5_D_SetAngle(300); AX_SERVO_TIM3_E_SetAngle(300); AX_SERVO_TIM3_F_SetAngle(300); AX_SERVO_TIM3_G_SetAngle(300); AX_SERVO_TIM3_H_SetAngle(300); AX_SERVO_TIM4_I_SetAngle(300); AX_SERVO_TIM4_J_SetAngle(300); AX_SERVO_TIM4_K_SetAngle(300); AX_SERVO_TIM4_L_SetAngle(300); AX_SERVO_TIM1_M_SetAngle(300); AX_SERVO_TIM1_N_SetAngle(300); AX_SERVO_TIM1_O_SetAngle(300); AX_SERVO_TIM1_P_SetAngle(300); AX_Delayms(1000);
printf("*90度...... \r\n"); AX_SERVO_TIM2_A_SetAngle(900); AX_SERVO_TIM2_B_SetAngle(900); AX_SERVO_TIM5_C_SetAngle(900); AX_SERVO_TIM5_D_SetAngle(900); AX_SERVO_TIM3_E_SetAngle(900); AX_SERVO_TIM3_F_SetAngle(900); AX_SERVO_TIM3_G_SetAngle(900); AX_SERVO_TIM3_H_SetAngle(900); AX_SERVO_TIM4_I_SetAngle(900); AX_SERVO_TIM4_J_SetAngle(900); AX_SERVO_TIM4_K_SetAngle(900); AX_SERVO_TIM4_L_SetAngle(900); AX_SERVO_TIM1_M_SetAngle(900); AX_SERVO_TIM1_N_SetAngle(900); AX_SERVO_TIM1_O_SetAngle(900); AX_SERVO_TIM1_P_SetAngle(900); AX_Delayms(1000);
printf("*150度...... \r\n"); AX_SERVO_TIM2_A_SetAngle(1500); AX_SERVO_TIM2_B_SetAngle(1500); AX_SERVO_TIM5_C_SetAngle(1500); AX_SERVO_TIM5_D_SetAngle(1500); AX_SERVO_TIM3_E_SetAngle(1500); AX_SERVO_TIM3_F_SetAngle(1500); AX_SERVO_TIM3_G_SetAngle(1500); AX_SERVO_TIM3_H_SetAngle(1500); AX_SERVO_TIM4_I_SetAngle(1500); AX_SERVO_TIM4_J_SetAngle(1500); AX_SERVO_TIM4_K_SetAngle(1500); AX_SERVO_TIM4_L_SetAngle(1500); AX_SERVO_TIM1_M_SetAngle(1500); AX_SERVO_TIM1_N_SetAngle(1500); AX_SERVO_TIM1_O_SetAngle(1500); AX_SERVO_TIM1_P_SetAngle(1500); AX_Delayms(1000); } } |
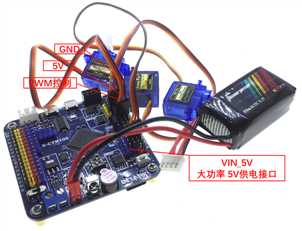
可在16路舵机接口中任意一路插入舵机,舵机即可循环30°、90°、150°运动,接口顺序如下图,使用时注意电源供电能力及舵机的功率,一般电脑USB供电(500mA)可为1路GS90舵机提供电源,如果插入多路舵机,或舵机负载扭矩大,也可通过VIN-5V接口供电。
https://m.guokr.com/article/5292/#weixin.qq.com
标签:创客 驱动 style 理解 产生 gray 接地线 5.5 bsp
原文地址:https://www.cnblogs.com/xtark/p/9414237.html