标签:进制 fine inf time ever 初始 rpo one printf
main.c
/* SPDX-License-Identifier: BSD-3-Clause
* Copyright(c) 2010-2016 Intel Corporation
*/
#include <stdio.h>
#include <getopt.h>
#include <rte_common.h>
#include <rte_eal.h>
#include <rte_malloc.h>
#include <rte_mempool.h>
#include <rte_ethdev.h>
#include <rte_cycles.h>
#include <rte_mbuf.h>
#include <rte_meter.h>
/*
* Traffic metering configuration
*
*/
#define APP_MODE_FWD 0
#define APP_MODE_SRTCM_COLOR_BLIND 1
#define APP_MODE_SRTCM_COLOR_AWARE 2
#define APP_MODE_TRTCM_COLOR_BLIND 3
#define APP_MODE_TRTCM_COLOR_AWARE 4
#define APP_MODE APP_MODE_SRTCM_COLOR_BLIND // 手动设定 选取 srTCM的色盲模式。
#include "main.h"
#define APP_PKT_FLOW_POS 33
#define APP_PKT_COLOR_POS 5
#if APP_PKT_FLOW_POS > 64 || APP_PKT_COLOR_POS > 64
#error Byte offset needs to be less than 64
#endif
/*
* Buffer pool configuration
*
***/
#define NB_MBUF 8192
#define MEMPOOL_CACHE_SIZE 256
static struct rte_mempool *pool = NULL;
/*
* NIC configuration
*
***/
static struct rte_eth_conf port_conf = { // 端口配置信息
.rxmode = { // rx 侧
.mq_mode = ETH_MQ_RX_RSS, // .mq_mode:多队列模式,后面的enum是RSS开启的多队列模式
.max_rx_pkt_len = ETHER_MAX_LEN, // 能接受的最大pkt长度,当 JUMBO_FRAME 启用时生效。
.split_hdr_size = 0, // hdr buf size (header_split enabled).
.offloads = (DEV_RX_OFFLOAD_CHECKSUM |
DEV_RX_OFFLOAD_CRC_STRIP), // 网卡offload就是把一些操作,转移到专用硬件上(比如网卡),从而释放CPU资源。这里就是校验和的计算。
},
.rx_adv_conf = { // RX filtering configuration.
.rss_conf = { // RSS configuration
.rss_key = NULL, // If not NULL, 40-byte hash key. 否则使用默认的key
.rss_hf = ETH_RSS_IP, // Hash functions to apply. 这里就是会把IP包分到特定队列。
},
},
.txmode = { // tx 侧
.mq_mode = ETH_DCB_NONE, // It is in neither DCB nor VT mode.
},
};
#define NIC_RX_QUEUE_DESC 1024
#define NIC_TX_QUEUE_DESC 1024
#define NIC_RX_QUEUE 0
#define NIC_TX_QUEUE 0
/*
* Packet RX/TX
*
***/
#define PKT_RX_BURST_MAX 32
#define PKT_TX_BURST_MAX 32
#define TIME_TX_DRAIN 200000ULL
static uint16_t port_rx;
static uint16_t port_tx;
static struct rte_mbuf *pkts_rx[PKT_RX_BURST_MAX];
struct rte_eth_dev_tx_buffer *tx_buffer;
struct rte_meter_srtcm_params app_srtcm_params = {
.cir = 1000000 * 46, // 令牌桶每秒增加的令牌数量,单位字节
.cbs = 2048, // 令牌桶C的最大大小
.ebs = 2048 // 令牌桶E的最大大小
};
struct rte_meter_srtcm_profile app_srtcm_profile;
struct rte_meter_trtcm_params app_trtcm_params = {
.cir = 1000000 * 46, // 令牌桶C的增长速率,单位字节每秒
.pir = 1500000 * 46, // 令牌桶P的增长速率
.cbs = 2048, // 令牌桶C的最大大小
.pbs = 2048 // 令牌桶P的最大大小
};
struct rte_meter_trtcm_profile app_trtcm_profile;
#define APP_FLOWS_MAX 256
FLOW_METER app_flows[APP_FLOWS_MAX];
// 一种flow对应一组令牌桶。
// FLOW_METER: 根据选取的算法选择一种结构体,里面存放的信息是令牌桶的可用bytes
// #define FLOW_METER int
// #define FLOW_METER struct rte_meter_trtcm
// #define FLOW_METER struct rte_meter_srtcm
static int
app_configure_flow_table(void)
{
uint32_t i;
int ret;
/*rte_meter_srtcm_profile_config() 配置srTCM算法的参数到profile
参数两个
1. rte_meter_srtcm_profile * ,也就是profile指针
2. rte_meter_srtcm_params * 类型,是srTCM的三个参数。
*/
ret = rte_meter_srtcm_profile_config(&app_srtcm_profile,
&app_srtcm_params);
if (ret) // 返回值 0 代表配置成功
return ret;
// 配置 trTCM 算法
ret = rte_meter_trtcm_profile_config(&app_trtcm_profile,
&app_trtcm_params);
if (ret)
return ret;
// 用到的宏定义见main.h
for (i = 0; i < APP_FLOWS_MAX; i++) {
/* rte_meter_srtcm_config() 和 rte_meter_trtcm_config()
对每一个限速的flow进行scTCM/trtcm配置。
参数1:struct rte_meter_srtcm * 或 struct rte_meter_trtcm *
参数2:有效的profile指针。
*/
ret = FUNC_CONFIG(&app_flows[i], &PROFILE);
if (ret)
return ret;
}
return 0;
}
static inline void
app_set_pkt_color(uint8_t *pkt_data, enum policer_action color) // 为packet标记上Meter计算出来的颜色
{
pkt_data[APP_PKT_COLOR_POS] = (uint8_t)color;
}
static inline int
app_pkt_handle(struct rte_mbuf *pkt, uint64_t time)
{
uint8_t input_color, output_color;
uint8_t *pkt_data = rte_pktmbuf_mtod(pkt, uint8_t *); // rte_pktmbuf_mtod:返回 mbuf 中 packet data 的起始地址
uint32_t pkt_len = rte_pktmbuf_pkt_len(pkt) - sizeof(struct ether_hdr); // 计算去掉以太网头部(14字节)的包长度
uint8_t flow_id = (uint8_t)(pkt_data[APP_PKT_FLOW_POS] & (APP_FLOWS_MAX - 1));
input_color = pkt_data[APP_PKT_COLOR_POS]; // 宏:APP_PKT_COLOR_POS为5。这个数组是uint8_t的,所以颜色就是 pkt_data[5]
// “为了简化调试,颜色被定义为目标MAC地址的LSB(最低有效位)字节。”—— sample guide
enum policer_action action;
/* color input is not used for blind modes */
// FUNC_METER: rte_meter_srtcm_color_blind_check() 或 aware_check,执行算法的限速,返回值是处理结果的颜色。
output_color = (uint8_t) FUNC_METER(&app_flows[flow_id],
&PROFILE, // profile指针
time, // 当前CPU的时间戳
pkt_len, // IP pkt 的长度
(enum rte_meter_color) input_color); // 若是非色盲模式,第五个参数是 input color
/* Apply policing and set the output color */
action = policer_table[input_color][output_color];
// policer_table 是一个二维数组,见main.h
app_set_pkt_color(pkt_data, action); // marker
return action;
}
static __attribute__((noreturn)) int
main_loop(__attribute__((unused)) void *dummy)
{
uint64_t current_time, last_time = rte_rdtsc(); // 获取从开机起至当前的时间戳
uint32_t lcore_id = rte_lcore_id(); // 获取自己的 lcore id
printf("Core %u: port RX = %d, port TX = %d\n", lcore_id, port_rx, port_tx);
while (1) {
uint64_t time_diff;
int i, nb_rx;
/* Mechanism to avoid stale packets in the output buffer */
current_time = rte_rdtsc(); // 获取从开机起至当前的时间戳
time_diff = current_time - last_time;
if (unlikely(time_diff > TIME_TX_DRAIN)) {// 时间到了
/* Flush tx buffer */
rte_eth_tx_buffer_flush(port_tx, NIC_TX_QUEUE, tx_buffer); // 将 buffer 里的 pkt 全部从 port id为 port_tx 的 0号 Tx queue 发出去
last_time = current_time;
}
/* Read packet burst from NIC RX */
// 收包,在port_rx端口上,0号队列
nb_rx = rte_eth_rx_burst(port_rx, NIC_RX_QUEUE, pkts_rx, PKT_RX_BURST_MAX);
/* Handle packets */
for (i = 0; i < nb_rx; i ++) {
struct rte_mbuf *pkt = pkts_rx[i]; // 操作该包的方法:收包之后创建mbuf结构体指针
/* Handle current packet */
if (app_pkt_handle(pkt, current_time) == DROP) // 收到包之后,对其进行 QoS meter,若为DROP,就丢弃
rte_pktmbuf_free(pkt);
else
rte_eth_tx_buffer(port_tx, NIC_TX_QUEUE, tx_buffer, pkt); // 其余颜色都是普通的转发。本实例没有针对其余两种颜色设计更多的逻辑。
}
}
}
static void
print_usage(const char *prgname)
{
printf ("%s [EAL options] -- -p PORTMASK\n"
" -p PORTMASK: hexadecimal bitmask of ports to configure\n",
prgname);
}
static int
parse_portmask(const char *portmask)
{
char *end = NULL;
unsigned long pm;
/* parse hexadecimal string */
pm = strtoul(portmask, &end, 16);
if ((portmask[0] == '\0') || (end == NULL) || (*end != '\0'))
return -1;
if (pm == 0)
return -1;
return pm;
}
/* Parse the argument given in the command line of the application */
static int
parse_args(int argc, char **argv)
{
int opt;
char **argvopt;
int option_index;
char *prgname = argv[0];
static struct option lgopts[] = {
{NULL, 0, 0, 0}
};
uint64_t port_mask, i, mask;
argvopt = argv;
while ((opt = getopt_long(argc, argvopt, "p:", lgopts, &option_index)) != EOF) {
switch (opt) {
case 'p': // 端口掩码
port_mask = parse_portmask(optarg);
if (port_mask == 0) { // 返回值是16进制的数字
printf("invalid port mask (null port mask)\n");
print_usage(prgname);
return -1;
}
for (i = 0, mask = 1; i < 64; i ++, mask <<= 1){
if (mask & port_mask){ // 分配一个用于 rx 的 port
port_rx = i;
port_mask &= ~ mask;
break;
}
}
for (i = 0, mask = 1; i < 64; i ++, mask <<= 1){
if (mask & port_mask){ // 分配一个用于 tx 的 port
port_tx = i;
port_mask &= ~ mask;
break;
}
}
if (port_mask != 0) {
printf("invalid port mask (more than 2 ports)\n"); // 该程序只需要两个port
print_usage(prgname);
return -1;
}
break;
default:
print_usage(prgname);
return -1;
}
}
if (optind <= 1) {
print_usage(prgname);
return -1;
}
argv[optind-1] = prgname;
optind = 1; /* reset getopt lib */
return 0;
}
int
main(int argc, char **argv)
{
uint32_t lcore_id;
uint16_t nb_rxd = NIC_RX_QUEUE_DESC;
uint16_t nb_txd = NIC_TX_QUEUE_DESC;
struct rte_eth_conf conf;
struct rte_eth_rxconf rxq_conf;
struct rte_eth_txconf txq_conf;
struct rte_eth_dev_info dev_info;
int ret;
/* EAL init */ // 初始化 EAL
ret = rte_eal_init(argc, argv);
if (ret < 0)
rte_exit(EXIT_FAILURE, "Invalid EAL parameters\n");
argc -= ret;
argv += ret;
if (rte_lcore_count() != 1) { // 本程序只需要一个逻辑核心
rte_exit(EXIT_FAILURE, "This application does not accept more than one core. "
"Please adjust the \"-c COREMASK\" parameter accordingly.\n");
}
/* Application non-EAL arguments parse */
ret = parse_args(argc, argv);
if (ret < 0)
rte_exit(EXIT_FAILURE, "Invalid input arguments\n");
/* Buffer pool init */
// 创建缓存池
pool = rte_pktmbuf_pool_create("pool", NB_MBUF, MEMPOOL_CACHE_SIZE,
0, RTE_MBUF_DEFAULT_BUF_SIZE, rte_socket_id());
if (pool == NULL)
rte_exit(EXIT_FAILURE, "Buffer pool creation error\n");
/* NIC init */
conf = port_conf;
rte_eth_dev_info_get(port_rx, &dev_info); // 查询rx网口的信息,网卡的各种功能都可以通过此结构体访问
if (dev_info.tx_offload_capa & DEV_TX_OFFLOAD_MBUF_FAST_FREE)
conf.txmode.offloads |= DEV_TX_OFFLOAD_MBUF_FAST_FREE; // 如果有 mbuf fast free 功能就开启
conf.rx_adv_conf.rss_conf.rss_hf &= dev_info.flow_type_rss_offloads; // 配置成网卡支持的rss设置
if (conf.rx_adv_conf.rss_conf.rss_hf !=
port_conf.rx_adv_conf.rss_conf.rss_hf) { // 若更改了rss配置,给出一条提示信息
printf("Port %u modified RSS hash function based on hardware support,"
"requested:%#"PRIx64" configured:%#"PRIx64"\n", // #define PRIx64 "llx"
port_rx,
port_conf.rx_adv_conf.rss_conf.rss_hf,
conf.rx_adv_conf.rss_conf.rss_hf);
}
ret = rte_eth_dev_configure(port_rx, 1, 1, &conf); // 为 rx 口配置收发队列各一条
if (ret < 0)
rte_exit(EXIT_FAILURE, "Port %d configuration error (%d)\n", port_rx, ret);
ret = rte_eth_dev_adjust_nb_rx_tx_desc(port_rx, &nb_rxd, &nb_txd);
if (ret < 0)
rte_exit(EXIT_FAILURE, "Port %d adjust number of descriptors error (%d)\n",
port_rx, ret);
rxq_conf = dev_info.default_rxconf;
rxq_conf.offloads = conf.rxmode.offloads;
ret = rte_eth_rx_queue_setup(port_rx, NIC_RX_QUEUE, nb_rxd,
rte_eth_dev_socket_id(port_rx),
&rxq_conf, pool); // 为 rx port setup rx queue。
if (ret < 0)
rte_exit(EXIT_FAILURE, "Port %d RX queue setup error (%d)\n", port_rx, ret);
txq_conf = dev_info.default_txconf;
txq_conf.offloads = conf.txmode.offloads;
ret = rte_eth_tx_queue_setup(port_rx, NIC_TX_QUEUE, nb_txd,
rte_eth_dev_socket_id(port_rx),// 为 rx port setup tx queue。
&txq_conf);
if (ret < 0)
rte_exit(EXIT_FAILURE, "Port %d TX queue setup error (%d)\n", port_rx, ret);
conf = port_conf;
rte_eth_dev_info_get(port_tx, &dev_info); // 获取 tx port 的设备信息
if (dev_info.tx_offload_capa & DEV_TX_OFFLOAD_MBUF_FAST_FREE) // 开启 tx port 的 mbuf fast free
conf.txmode.offloads |= DEV_TX_OFFLOAD_MBUF_FAST_FREE;
conf.rx_adv_conf.rss_conf.rss_hf &= dev_info.flow_type_rss_offloads; // 查看 tx port 的 rss 配置是否满足要求
if (conf.rx_adv_conf.rss_conf.rss_hf !=
port_conf.rx_adv_conf.rss_conf.rss_hf) {
printf("Port %u modified RSS hash function based on hardware support,"
"requested:%#"PRIx64" configured:%#"PRIx64"\n",
port_tx,
port_conf.rx_adv_conf.rss_conf.rss_hf,
conf.rx_adv_conf.rss_conf.rss_hf);
}
ret = rte_eth_dev_configure(port_tx, 1, 1, &conf); // 为 tx port 配置收发队列各一条
if (ret < 0)
rte_exit(EXIT_FAILURE, "Port %d configuration error (%d)\n", port_tx, ret);
nb_rxd = NIC_RX_QUEUE_DESC;
nb_txd = NIC_TX_QUEUE_DESC;
ret = rte_eth_dev_adjust_nb_rx_tx_desc(port_tx, &nb_rxd, &nb_txd);
if (ret < 0)
rte_exit(EXIT_FAILURE, "Port %d adjust number of descriptors error (%d)\n",
port_tx, ret);
rxq_conf = dev_info.default_rxconf;
rxq_conf.offloads = conf.rxmode.offloads;
ret = rte_eth_rx_queue_setup(port_tx, NIC_RX_QUEUE, nb_rxd,
rte_eth_dev_socket_id(port_tx), // 为 tx port setup rx queue
NULL, pool);
if (ret < 0)
rte_exit(EXIT_FAILURE, "Port %d RX queue setup error (%d)\n", port_tx, ret);
txq_conf = dev_info.default_txconf;
txq_conf.offloads = conf.txmode.offloads;
ret = rte_eth_tx_queue_setup(port_tx, NIC_TX_QUEUE, nb_txd,
rte_eth_dev_socket_id(port_tx), // 为 tx port setup tx queue
NULL);
if (ret < 0)
rte_exit(EXIT_FAILURE, "Port %d TX queue setup error (%d)\n", port_tx, ret);
// 为 tx 分配 buffer
tx_buffer = rte_zmalloc_socket("tx_buffer",
RTE_ETH_TX_BUFFER_SIZE(PKT_TX_BURST_MAX), 0,
rte_eth_dev_socket_id(port_tx));
if (tx_buffer == NULL)
rte_exit(EXIT_FAILURE, "Port %d TX buffer allocation error\n",
port_tx);
rte_eth_tx_buffer_init(tx_buffer, PKT_TX_BURST_MAX);
ret = rte_eth_dev_start(port_rx);
if (ret < 0)
rte_exit(EXIT_FAILURE, "Port %d start error (%d)\n", port_rx, ret);
ret = rte_eth_dev_start(port_tx);
if (ret < 0)
rte_exit(EXIT_FAILURE, "Port %d start error (%d)\n", port_tx, ret);
rte_eth_promiscuous_enable(port_rx);
rte_eth_promiscuous_enable(port_tx);
/* App configuration */
ret = app_configure_flow_table();
if (ret < 0)
rte_exit(EXIT_FAILURE, "Invalid configure flow table\n");
/* Launch per-lcore init on every lcore */
rte_eal_mp_remote_launch(main_loop, NULL, CALL_MASTER);
RTE_LCORE_FOREACH_SLAVE(lcore_id) {
if (rte_eal_wait_lcore(lcore_id) < 0)
return -1;
}
return 0;
}
main.h
/* SPDX-License-Identifier: BSD-3-Clause
* Copyright(c) 2010-2014 Intel Corporation
*/
#ifndef _MAIN_H_
#define _MAIN_H_
enum policer_action {
GREEN = e_RTE_METER_GREEN,
YELLOW = e_RTE_METER_YELLOW,
RED = e_RTE_METER_RED,
DROP = 3,
};
// 其中行表示输入颜色,列表示输出颜色,值指示要针对该特定情况采取的操作
enum policer_action policer_table[e_RTE_METER_COLORS][e_RTE_METER_COLORS] =
{
{ GREEN, RED, RED},
{ DROP, YELLOW, RED},
{ DROP, DROP, RED}
};
// GREEN,YELLOW,RED表示tag绿,黄,红。DROP就表示丢包
// 每一个输入和输出颜色相同的包,都保持相同的颜色。
// 每个颜色改进(变成更好的颜色)的包都会被丢弃(但这种特殊情况不会发生,因此不会使用这些值)。
// 其余情况下,颜色改为红色。
#if APP_MODE == APP_MODE_FWD // forward 模式
#define FUNC_METER(m, p, time, pkt_len, pkt_color) ({ void *mp = m; void *pp = p; mp = mp; pp = pp; time = time; pkt_len = pkt_len; pkt_color; })
#define FUNC_CONFIG(a, b) 0
#define FLOW_METER int
#define PROFILE app_srtcm_profile
#elif APP_MODE == APP_MODE_SRTCM_COLOR_BLIND // srTCM算法,色盲模式
#define FUNC_METER(m, p, time, pkt_len, pkt_color) rte_meter_srtcm_color_blind_check(m, p, time, pkt_len)
#define FUNC_CONFIG rte_meter_srtcm_config
#define FLOW_METER struct rte_meter_srtcm
#define PROFILE app_srtcm_profile
#elif (APP_MODE == APP_MODE_SRTCM_COLOR_AWARE) // srTCM算法,非色盲模式
#define FUNC_METER rte_meter_srtcm_color_aware_check
#define FUNC_CONFIG rte_meter_srtcm_config
#define FLOW_METER struct rte_meter_srtcm
#define PROFILE app_srtcm_profile
#elif (APP_MODE == APP_MODE_TRTCM_COLOR_BLIND) // trTCM算法,色盲模式
#define FUNC_METER(m, p, time, pkt_len, pkt_color) rte_meter_trtcm_color_blind_check(m, p, time, pkt_len)
#define FUNC_CONFIG rte_meter_trtcm_config
#define FLOW_METER struct rte_meter_trtcm
#define PROFILE app_trtcm_profile
#elif (APP_MODE == APP_MODE_TRTCM_COLOR_AWARE) // trTCM算法,非色盲模式
#define FUNC_METER rte_meter_trtcm_color_aware_check
#define FUNC_CONFIG rte_meter_trtcm_config
#define FLOW_METER struct rte_meter_trtcm
#define PROFILE app_trtcm_profile
#else
#error Invalid value for APP_MODE
#endif
#endif /* _MAIN_H_ */
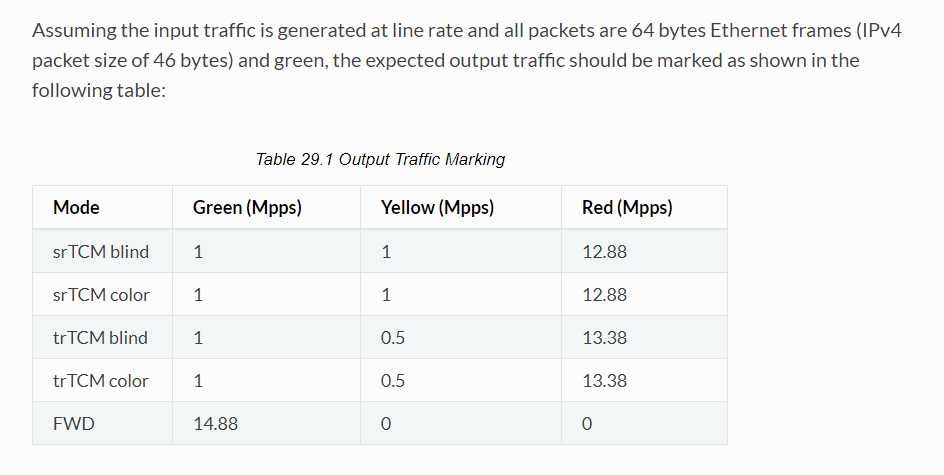
这是一个在简单的forwarding基础上基于srTCM或trTCM的QoS Meter程序,使用两个端口,每个端口都有一条收发队列。DPDK的API能配置srTCM或trTCM算法的参数,再用DPDK的API进行限速:将packet的长度进行对应的令牌桶算法,返回特定的颜色。到此,RFC上的算法的实现都由DPDK API完成了,之后对应的逻辑需要自行编码设定,典型的RFC中说的就是红色就丢包,当然本sample也给了另一种情况,可以看看。这部分是可以编程的地方,不过可能需要比较复杂的调试。
颜色本来是应该放在IP header中的DS字段的,但本sample guide中说:“为了调试方便,将目的MAC地址的最低有效位取为颜色字段”。这部分也需要另外改变源代码。
若线速产生包,经过此sample转发,基于sample中给的参数进行QoS,会有特定的流量速率。数据在 sample guide中给出了:
有一个问题是明明收发队列只配置了各一条,为何还开启了一大堆RSS的选项。
接下来的考虑:要回顾流分类和RSS的概念,感觉摸了点皮毛,需要好好做下总结。再看看QoS meter(限速)和flow classify(流分类),flow filtering (流过滤)的sample,总结一下它们之间有没有什么共通或者可以结合的地方。开始编程和调试,这一步迟早要迈出去。DPDK QoS 还有两个模块 RED Dropper 和 Scheduler 以及 Scheduler 的 sample 需要攻坚。
标签:进制 fine inf time ever 初始 rpo one printf
原文地址:https://www.cnblogs.com/ZCplayground/p/9452364.html