标签:sequence fprintf width The png matlab *** 技术分享 rsh
代码:
function y = circonvt(x1,x2,N) %% N-point Circular convolution between x1 and x2: (time domain) %% ------------------------------------------------------------------ %% [y] = circonvt(x1,x2,N) %% y = output sequence containning the circular convolution %% x1 = input sequence of length N1 <= N %% x2 = input sequence of length N2 <= N %% %% N = size of circular buffer %% Method: y(n) = sum( x1(m)*x2((n-m) mod N) ) %% Check for length of x1 if length(x1) > N error(‘N must be >= the length of x1 !‘) end %% Check for length of x2 if length(x2) > N error(‘N must be >= the length of x2 !‘) end x1 = [x1 zeros(1,N-length(x1))]; x2 = [x2 zeros(1,N-length(x2))]; m = [0:1:N-1]; x2 = x2(mod_1(-m, N)+1); H = zeros(N,N); for n = 1:1:N H(n,:) = cirshftt(x2,n-1,N); end y = x1*conj(H‘); % x1---row vector % H % y = H*x1‘; % x1---column vector
主程序:
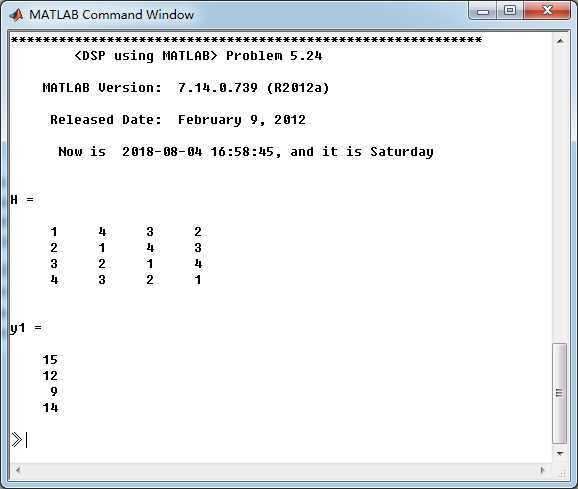
%% +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output Info about this m-file fprintf(‘\n***********************************************************\n‘); fprintf(‘ <DSP using MATLAB> Problem 5.24 \n\n‘); banner(); %% +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ % ------------------------------------------------------------------- % % ------------------------------------------------------------------- N = 4; n1 = [0:3]; x1 = [1, 2, 2]; x2 = [1, 2, 3, 4]; y1 = circonvt(x1, x2, N)
运行结果:
代码:
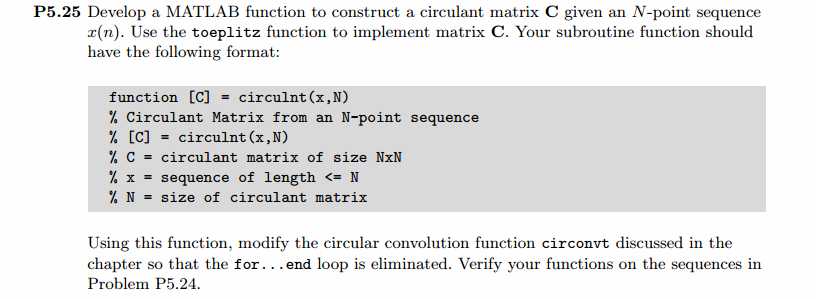
function [C] = circulnt(x, N)
%% Circulant Matrix from an N-point sequence
%% ------------------------------------------------------------------
%% [C] = circulnt(x, N)
%% C = Circulant Matrix of size NxN
%% x = sequence of length <= N
%%
%% N = size of circulant matrix
if length(x) > N
error(‘N must be >= the length of x !‘)
end
x = [x zeros(1, N-length(x))];
for i = 1 : N
c(i) = x(i);
end
m = [0:1:N-1]; x_fold = x(mod_1(-m, N)+1);
r = x_fold;
C = toeplitz(c,r);
function y = circonvt_v3(x1,x2,N)
%% N-point Circular convolution between x1 and x2: (time domain)
%% ------------------------------------------------------------------
%% [y] = circonvt(x1,x2,N)
%% y = output sequence containning the circular convolution
%% x1 = input sequence of length N1 <= N
%% x2 = input sequence of length N2 <= N
%%
%% N = size of circular buffer
%% Method: y(n) = sum( x1(m)*x2((n-m) mod N) )
%% Check for length of x1
if length(x1) > N
error(‘N must be >= the length of x1 !‘)
end
%% Check for length of x2
if length(x2) > N
error(‘N must be >= the length of x2 !‘)
end
x1 = [x1 zeros(1,N-length(x1))];
x2 = [x2 zeros(1,N-length(x2))];
C = circulnt(x2, N);
% m = [0:1:N-1]; x2 = x2(mod_1(-m, N)+1); H = zeros(N,N);
% for n = 1:1:N
% H(n,:) = cirshftt(x2,n-1,N);
% end
% y = x1*conj(H‘); % x1---row vector
y = C*x1‘; % x1---column vector
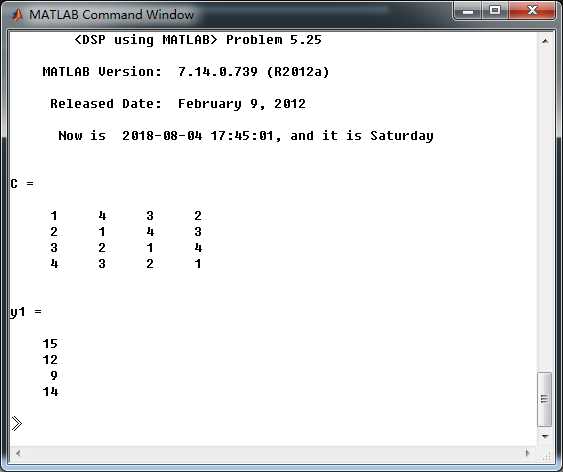
%% +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output Info about this m-file fprintf(‘\n***********************************************************\n‘); fprintf(‘ <DSP using MATLAB> Problem 5.25 \n\n‘); banner(); %% +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ % ------------------------------------------------------------------- % % ------------------------------------------------------------------- N = 4; n1 = [0:3]; x1 = [1, 2, 2]; x2 = [1, 2, 3, 4]; %C = circulnt(x2, 4); y1 = circonvt_v3(x1, x2, N)
运行结果:
代码:
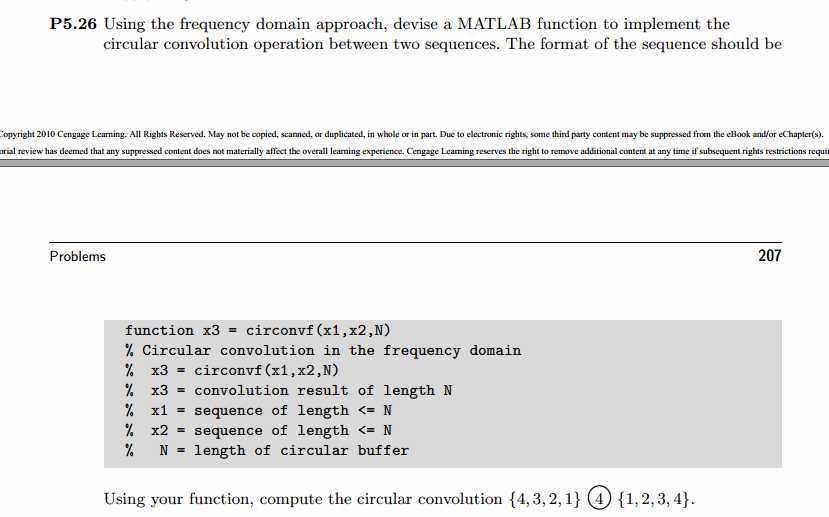
function x3 = circonvf(x1, x2, N)
%% N-point Circular convolution between x1 and x2: (frequency domain)
%% ------------------------------------------------------------------
%% [x3] = circonvf(x1,x2,N)
%% x3 = output sequence containning the circular convolution
%% x1 = input sequence of length N1 <= N
%% x2 = input sequence of length N2 <= N
%%
%% N = size of circular buffer
%% Method: x3(n) = IDFT[X1(k)X2(k)]
%% Check for length of x1
if length(x1) > N
error(‘N must be >= the length of x1 !‘)
end
%% Check for length of x2
if length(x2) > N
error(‘N must be >= the length of x2 !‘)
end
x1 = [x1 zeros(1,N-length(x1))];
x2 = [x2 zeros(1,N-length(x2))];
X1k_DFT = dft(x1, N);
X2k_DFT = dft(x2, N);
x3 = real(idft( X1k_DFT.* X2k_DFT, N));
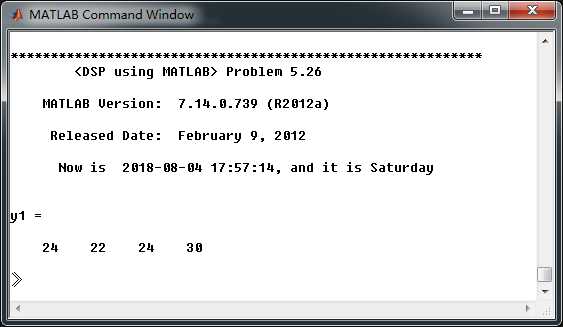
%% +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output Info about this m-file fprintf(‘\n***********************************************************\n‘); fprintf(‘ <DSP using MATLAB> Problem 5.26 \n\n‘); banner(); %% +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ % ------------------------------------------------------------------- % % ------------------------------------------------------------------- N = 4; n1 = [0:3]; x1 = [4,3,2,1]; %x1 = [1,2,2]; n2 = [0:3]; x2 = [1, 2, 3, 4]; %C = circulnt(x2, 4); y1 = circonvf(x1, x2, N)
运行结果:
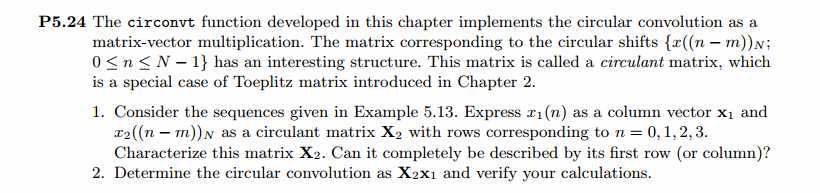
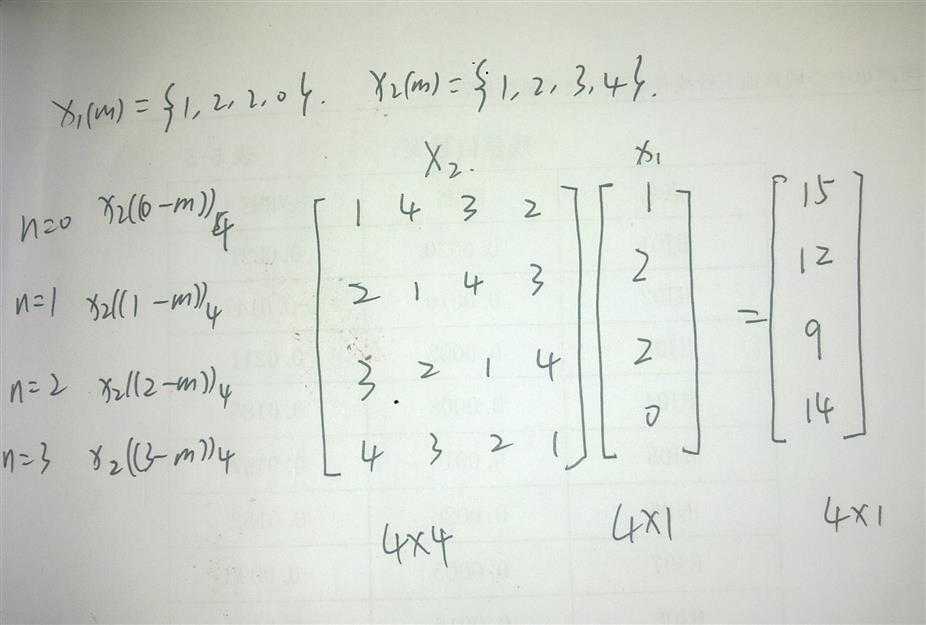
《DSP using MATLAB》Problem 5.24-5.25-5.26
标签:sequence fprintf width The png matlab *** 技术分享 rsh
原文地址:https://www.cnblogs.com/ky027wh-sx/p/9457086.html