标签:时间 expect img rds ack line 根据 机器学习 需要
马尔可夫决策过程(MDP)是对连续决策进行建模,当前的动作不仅对当前产生影响,而且还会对将来的的情况产生影响,如果从奖励的角度,即MDP不仅影响即时的奖励,而且还会影响将来的长期奖励,因此,MDP需要对即时奖励与长期奖励的获得进行权衡。
MDP定义了从交互中学习的框架,决策者(或称为学习者)称为Agent,那与agent交互的所有统称为environment. 二者是连续地进行交互,当agent采取某一动作时,environment对这个动作进行反应,将agent置于新情形,称为状态(state),并且也会对agent的动作进行打分,称为奖励(reward).

定义环境的状态:\(S_t \in \mathcal{S}\) , 动作\(A_t \in \mathcal{A(s)}\), 奖励\(R_{t+1}\in \mathcal{R}\)(注意,这里不同的书惯例是不同的,这里采用的是,当前t时刻agent采取的行动\(A_t\),环境对其反应的结果是产生\(S_{t+1},\ R_{t+1}\) ,即即时奖励是是在t+1时刻获得)。MDP因此会产生一个包含状态,动作与奖励的决策序列(称为sequence或trajectory):
\[
S_0,A_0,R_1,S_1,A_1,R_2,...
\]
而且,\(S_t,R_t\)的分布只取决于前一时刻的状态与动作:
\[
p(s‘,r|s,a) = Pr\{S_t = s‘,R_t=r|S_{t-1} = s,A_{t-1} = a\}
\]
其满足:
\[
\sum_{s‘\in\mathcal{S}}\sum_{r\in \mathcal{R}}p(s‘,r|s,a) = 1,\qquad \forall s\in \mathcal{S},a\in \mathcal{A(s)}
\]
有了上面的公式,我们可以推导出很多有用的公式,比如,状态转移概率(state-transition probabilities):
\[
p(s‘|s,a)\dot = Pr{S_t = s‘|S_{t-1} = s,A_{t-1} = a} = \sum_{r\in R}p(s‘,r|s,a)
\]
也可以得到状态-动作对的期望奖励:
\[
r(s,a) \dot = E[R_t| S_{t-1} = s, A_{t-1} = a] = \sum_{r\in \mathcal{R}}r \sum_{s‘\in \mathcal{S}}p(s‘,r|s,a)
\]
Agent的目标是最大化它能得到的所有奖励的总和,也即最大化累积奖励。使用奖励作为agent的目标,这也是强化学习区别其其它机器学习方法的最显著特征之一。
最大化累积奖励是agent的目标,为能量化这个目标,引入一个概念Returns(用\(G_t\)表示):
\[
G_t \dot = f(R_{t+1},R_{t+2},...,R_T)
\]
其中f是某种映射,T为最后一时间步。
通常最大化Returns的期望:
\[
\max E G_t
\]
\(G_t\)比较常见的版本是加和与折扣(discounted)加和:
\[
G_t \dot = R_{t+1} + R_{t+2} +...+R_T
\]
\[ G_t \dot = R_{t+1} + \gamma R_{t+2} + \gamma^2R_{t+3}+ ... =\sum_{k = 0}^{\infty} r^k R_{t+k+1} \]
其中\(0\le \gamma\le 1\),称为discount rate.
策略(policy)是从状态到选择可能动作概率的映射。\(\pi(a|s)\) 表示在状态a下执行动作能的概率。
在给定策略下,状态s的价值函数(value function)是从其状态到最终的期望收益(expected return):
\[
v_{\pi}(s) \dot = E_{\pi} [G_t |S_t = s] = E_{\pi} \big[\sum_{k =0}^{\infty}\gamma^kR_{t+k+1}\big|S_t = s \big], \quad \forall s\in \mathcal{S}
\]
也可得到动作-价值函数:
\[
q_{\pi}(s,a) \dot = E_{\pi} [G_t |S_t = s,A_t = a] = E_{\pi} \big[\sum_{k =0}^{\infty}\gamma^kR_{t+k+1}\big|S_t = s,A_t = a \big], \quad \forall s\in \mathcal{S},a \in \mathcal{A}
\]
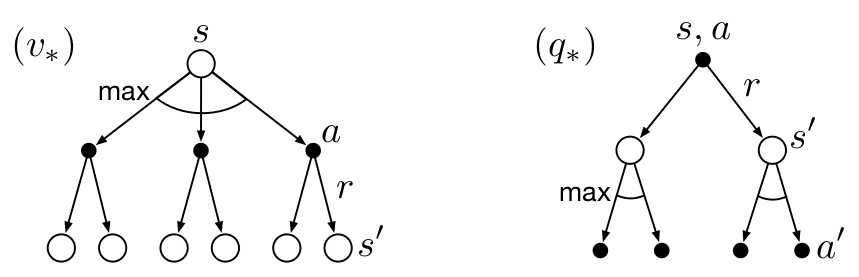
如果我们有一个最优策略(\(\pi_*\)),那么这个策略(可能不只一种)可以让价值函数获得最大值,并且根据Bellman equation, 可以得得到如下推导:
\[
\begin{array}\v_*(s)& =& \max_{a\in \mathcal{A(s)}} = q_{\pi_*}(s,a)\&=& \max_aE_{\pi^*}[G_t|S_t = s, A_t = a]\&=& \max_aE[R_{t+1}+\gamma v_*(S_{t+1})|S_t = s,A_t = a]\& =&\max_a \sum_{s‘,r}p(s‘,r|s,a)[r + \gamma v_*(s‘)]
\end{array}
\]
同理:
\[
q_*(s,a) = E[R_{t+1} + \gamma \max_{a‘}q_*(S_{t+1},a‘)|S_t = s,A_t = a]= \sum_{s‘,r}p(s‘,r|s,a)[r + \gamma\max_{a‘}q_*(s‘,a‘)]
\]
使用 backup diagrams:
标签:时间 expect img rds ack line 根据 机器学习 需要
原文地址:https://www.cnblogs.com/vpegasus/p/finite_mdp.html