标签:需要 nbsp collect axis2 spl 分享 void .com transform
OBB全称Oriented bounding box,方向包围盒算法。其表现效果和Unity的BoxCollider并无二致。由于3D空间的OBB需要多考虑一些情况
这里仅关注2D空间下的OBB。
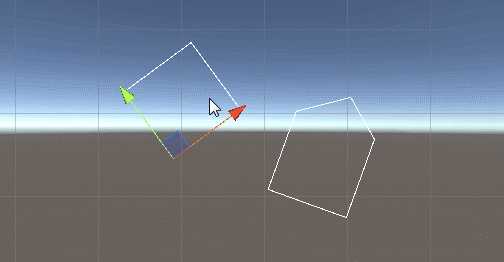
实现效果:
网上有许多OBB的讲解,其具体步骤也未必一样,我是这么做的
在两个凸多边形中找到一根轴,凸多边形所有在这根轴上的投影点不产生相交,则这两个凸多边形不相交。
这根轴一般取每个边的垂线,逐个投影进行测试。
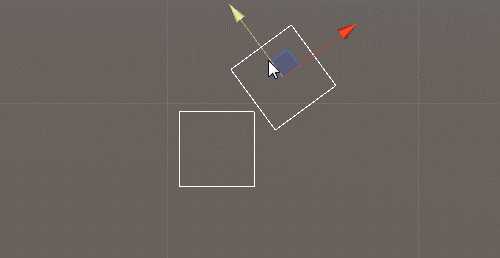
这里先上一个BOX的版本,如下图:
可以看见在右侧方块的投影轴上,得到了非相交结果
Box版本代码如下:

public class OBB : MonoBehaviour { public bool enableDebug; public int debug_axisIndex; int mDebugInternalAxisIndex; public Vector2 size; public Color gizmosColor = Color.white; public Vector2 P0 { get { return transform.localToWorldMatrix.MultiplyPoint3x4(-size * 0.5f); } } public Vector2 P1 { get { return transform.localToWorldMatrix.MultiplyPoint3x4(new Vector3(size.x * 0.5f, -size.y * 0.5f, 0)); } } public Vector2 P2 { get { return transform.localToWorldMatrix.MultiplyPoint3x4(size * 0.5f); } } public Vector2 P3 { get { return transform.localToWorldMatrix.MultiplyPoint3x4(new Vector3(-size.x * 0.5f, size.y * 0.5f, 0)); } } public float Width { get { return size.x; } } public float Height { get { return size.y; } } public bool Intersects(OBB other) { var axis1 = (P1 - P0).normalized; var axis2 = (P3 - P0).normalized; var axis3 = (other.P1 - other.P0).normalized; var axis4 = (other.P3 - other.P0).normalized; mDebugInternalAxisIndex = 0; var isNotIntersect = false; isNotIntersect |= ProjectionIsNotIntersect(this, other, axis1); isNotIntersect |= ProjectionIsNotIntersect(this, other, axis2); isNotIntersect |= ProjectionIsNotIntersect(this, other, axis3); isNotIntersect |= ProjectionIsNotIntersect(this, other, axis4); return isNotIntersect ? false : true; } bool ProjectionIsNotIntersect(OBB x, OBB y, Vector2 axis) { var x_p0 = Vector3.Project(x.P0, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(x.P0, axis), axis)); var x_p1 = Vector3.Project(x.P1, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(x.P1, axis), axis)); var x_p2 = Vector3.Project(x.P2, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(x.P2, axis), axis)); var x_p3 = Vector3.Project(x.P3, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(x.P3, axis), axis)); var y_p0 = Vector3.Project(y.P0, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(y.P0, axis), axis)); var y_p1 = Vector3.Project(y.P1, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(y.P1, axis), axis)); var y_p2 = Vector3.Project(y.P2, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(y.P2, axis), axis)); var y_p3 = Vector3.Project(y.P3, axis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(y.P3, axis), axis)); var xMin = Mathf.Min(x_p0, x_p1, x_p2, x_p3); var xMax = Mathf.Max(x_p0, x_p1, x_p2, x_p3); var yMin = Mathf.Min(y_p0, y_p1, y_p2, y_p3); var yMax = Mathf.Max(y_p0, y_p1, y_p2, y_p3); if (enableDebug) { if (debug_axisIndex == mDebugInternalAxisIndex) { Debug.DrawRay(Vector3.Project(x.P0, axis), Vector3.one * 0.1f); Debug.DrawRay(Vector3.Project(x.P2, axis), Vector3.one * 0.1f); Debug.DrawRay(Vector3.Project(y.P0, axis), Vector3.one * 0.1f, Color.white * 0.9f); Debug.DrawRay(Vector3.Project(y.P2, axis), Vector3.one * 0.1f, Color.white * 0.9f); Debug.DrawRay(Vector3.zero, Vector3.one * 0.1f, Color.black); Debug.DrawRay(Vector3.zero, axis, Color.yellow); Debug.DrawRay(xMin * Vector3.right, Vector3.one * 0.1f, Color.blue); Debug.DrawRay(xMax * Vector3.right, Vector3.one * 0.1f, Color.cyan); Debug.DrawRay(yMin * Vector3.right, Vector3.one * 0.1f, Color.red * 0.5f); Debug.DrawRay(yMax * Vector3.right, Vector3.one * 0.1f, Color.red * 0.5f); Debug.Log("(yMin >= xMin && yMin <= xMax): " + (yMin >= xMin && yMin <= xMax) + " frame count: " + Time.frameCount); Debug.Log("(yMax >= xMin && yMax <= xMax): " + (yMax >= xMin && yMax <= xMax) + " frame count: " + Time.frameCount); Debug.Log("(xMin >= yMin && xMin <= yMax): " + (xMin >= yMin && xMin <= yMax) + " frame count: " + Time.frameCount); Debug.Log("(xMax >= yMin && xMax <= yMax): " + (xMax >= yMin && xMax <= yMax) + " frame count: " + Time.frameCount); } mDebugInternalAxisIndex++; } if (yMin >= xMin && yMin <= xMax) return false; if (yMax >= xMin && yMax <= xMax) return false; if (xMin >= yMin && xMin <= yMax) return false; if (xMax >= yMin && xMax <= yMax) return false; return true; } void OnDrawGizmos() { var cacheMatrix = Gizmos.matrix; var cacheColor = Gizmos.color; Gizmos.matrix = transform.localToWorldMatrix; Gizmos.color = gizmosColor; Gizmos.DrawWireCube(Vector3.zero, new Vector3(size.x, size.y, 1f)); Gizmos.color = cacheColor; Gizmos.matrix = cacheMatrix; } }
using System.Collections; using System.Collections.Generic; using UnityEngine; public class Test : MonoBehaviour { public OBB a; public OBB b; void Update() { var isIntersects = a.Intersects(b); if (isIntersects) { a.gizmosColor = Color.red; b.gizmosColor = Color.red; } else { a.gizmosColor = Color.white; b.gizmosColor = Color.white; } } }
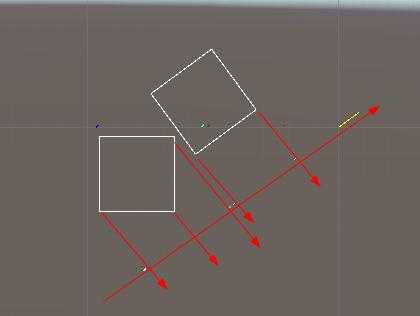
增加了一个debug开关,可以单独查看每个轴的映射信息。
那么下面是凸多边形的版本,垂线通过叉乘获取:
脚本如下:
using System.Collections; using System.Collections.Generic; using UnityEngine; public class OBB : MonoBehaviour { public Vector2[] points = new Vector2[0]; public int debug_Index; int mDebug_Index; public Color gizmosColor = Color.white; public bool Intersects(OBB other) { var isNotIntersect = false; mDebug_Index = 0; for (int i = 1; i <= points.Length; i++) { var p0 = transform.localToWorldMatrix.MultiplyPoint3x4(points[i - 1]); var p1 = transform.localToWorldMatrix.MultiplyPoint3x4(points[i % points.Length]); var axis = Vector3.Cross((p1 - p0), Vector3.forward).normalized; isNotIntersect |= ProjectionIsNotIntersect(this, other, axis); mDebug_Index++; } return isNotIntersect ? false : true; } bool ProjectionIsNotIntersect(OBB x, OBB y, Vector2 axis) { float xMin, xMax, yMin, yMax; GetMinMax(x.transform.localToWorldMatrix, x.points, axis, out xMin, out xMax); GetMinMax(y.transform.localToWorldMatrix, y.points, axis, out yMin, out yMax); if (yMin >= xMin && yMin <= xMax) return false; if (yMax >= xMin && yMax <= xMax) return false; if (xMin >= yMin && xMin <= yMax) return false; if (xMax >= yMin && xMax <= yMax) return false; return true; } void GetMinMax(Matrix4x4 matrix, Vector2[] points, Vector2 projectAxis, out float min, out float max) { min = float.MaxValue; max = float.MinValue; for (int i = 0; i < points.Length; i++) { var p = matrix.MultiplyPoint3x4(points[i]); var projectValue = Vector3.Project(p, projectAxis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(p, projectAxis), projectAxis)); if (projectValue > max) max = projectValue; } for (int i = 0; i < points.Length; i++) { var p = matrix.MultiplyPoint3x4(points[i]); var projectValue = Vector3.Project(p, projectAxis).magnitude * Mathf.Sign(Vector3.Dot(Vector3.Project(p, projectAxis), projectAxis)); if (projectValue < min) min = projectValue; } } void OnDrawGizmos() { var cacheColor = Gizmos.color; Gizmos.color = gizmosColor; for (int i = 1; i <= points.Length; i++) { var p0 = transform.localToWorldMatrix.MultiplyPoint3x4(points[i - 1]); var p1 = transform.localToWorldMatrix.MultiplyPoint3x4(points[i % points.Length]); Gizmos.DrawLine(p0, p1); } Gizmos.color = cacheColor; } }
到这里就结束了,如果是一个具体形状和点进行比较方法其实是非常多的,而类似这样的凸包之间进行相交测试OBB倒是一个蛮实用的办法。
标签:需要 nbsp collect axis2 spl 分享 void .com transform
原文地址:https://www.cnblogs.com/hont/p/9501169.html
