标签:can ESS 转变 依赖 cell set add 共享 bsp
原文链接:https://blog.csdn.net/chenssy/article/details/60781148
AQS内部维护着一个FIFO队列,该队列就是CLH同步队列。
CLH同步队列是一个FIFO双向队列,AQS依赖它来完成同步状态的管理,当前线程如果获取同步状态失败时,AQS则会将当前线程已经等待状态等信息构造成一个节点(Node)并将其加入到CLH同步队列,同时会阻塞当前线程,当同步状态释放时,会把首节点唤醒(公平锁),使其再次尝试获取同步状态。
在CLH同步队列中,一个节点表示一个线程,它保存着线程的引用(thread)、状态(waitStatus)、前驱节点(prev)、后继节点(next),其定义如下:
static final class Node { /** 共享 */ static final Node SHARED = new Node(); /** 独占 */ static final Node EXCLUSIVE = null; /** * 因为超时或者中断,节点会被设置为取消状态,被取消的节点时不会参与到竞争中的,他会一直保持取消状态不会转变为其他状态; */ static final int CANCELLED = 1; /** * 后继节点的线程处于等待状态,而当前节点的线程如果释放了同步状态或者被取消,将会通知后继节点,使后继节点的线程得以运行 */ static final int SIGNAL = -1; /** * 节点在等待队列中,节点线程等待在Condition上,当其他线程对Condition调用了signal()后,改节点将会从等待队列中转移到同步队列中,加入到同步状态的获取中 */ static final int CONDITION = -2; /** * 表示下一次共享式同步状态获取将会无条件地传播下去 */ static final int PROPAGATE = -3; /** 等待状态 */ volatile int waitStatus; /** 前驱节点 */ volatile Node prev; /** 后继节点 */ volatile Node next; /** 获取同步状态的线程 */ volatile Thread thread; Node nextWaiter; final boolean isShared() { return nextWaiter == SHARED; } final Node predecessor() throws NullPointerException { Node p = prev; if (p == null) throw new NullPointerException(); else return p; } Node() { } Node(Thread thread, Node mode) { this.nextWaiter = mode; this.thread = thread; } Node(Thread thread, int waitStatus) { this.waitStatus = waitStatus; this.thread = thread; } }
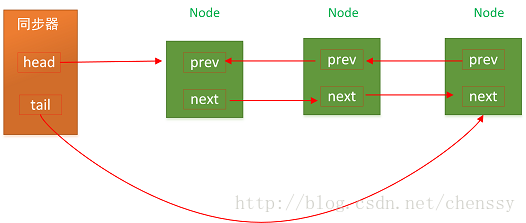
CLH同步队列结构图如下:
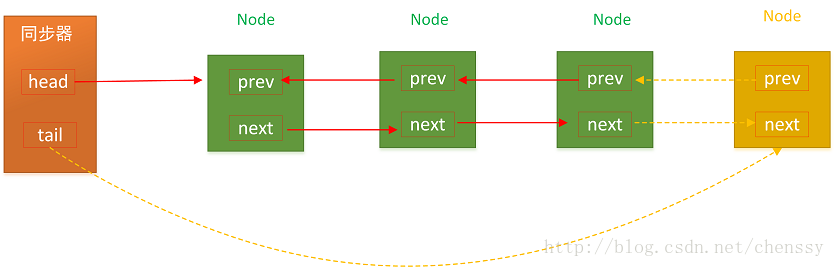
学了数据结构的我们,CLH队列入列是再简单不过了,无非就是tail指向新节点、新节点的prev指向当前最后的节点,当前最后一个节点的next指向当前节点。代码我们可以看看addWaiter(Node node)方法:
private Node addWaiter(Node mode) { //新建Node Node node = new Node(Thread.currentThread(), mode); //快速尝试添加尾节点 Node pred = tail; if (pred != null) { node.prev = pred; //CAS设置尾节点 if (compareAndSetTail(pred, node)) { pred.next = node; return node; } } //多次尝试 enq(node); return node; }
addWaiter(Node node)先通过快速尝试设置尾节点,如果失败,则调用enq(Node node)方法设置尾节点
private Node enq(final Node node) { //多次尝试,直到成功为止 for (;;) { Node t = tail; //tail不存在,设置为首节点 if (t == null) { if (compareAndSetHead(new Node())) tail = head; } else { //设置为尾节点 node.prev = t; if (compareAndSetTail(t, node)) { t.next = node; return t; } } } }
在上面代码中,两个方法都是通过一个CAS方法compareAndSetTail(Node expect, Node update)来设置尾节点,该方法可以确保节点是线程安全添加的。在enq(Node node)方法中,AQS通过“死循环”的方式来保证节点可以正确添加,只有成功添加后,当前线程才会从该方法返回,否则会一直执行下去。
过程图如下:
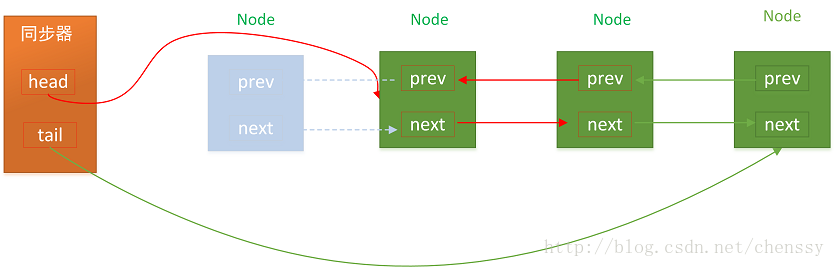
CLH同步队列遵循FIFO,首节点的线程释放同步状态后,将会唤醒它的后继节点(next),而后继节点将会在获取同步状态成功时将自己设置为首节点,这个过程非常简单,head执行该节点并断开原首节点的next和当前节点的prev即可,注意在这个过程是不需要使用CAS来保证的,因为只有一个线程能够成功获取到同步状态。过程图如下:
标签:can ESS 转变 依赖 cell set add 共享 bsp
原文地址:https://www.cnblogs.com/fswhq/p/CLH.html